Sorry for the long-winded reply.
It's my understanding the baro isn't used for altitude adjustments, but is used for live data which can change as air currents around your bike change, not just long term changes as you drive up a mountain or similar.
I know you're busy so probably didn't look at CFI document I linked to earlier. It explains a bunch.
P1 is referenced as being barometric / atmospheric pressure sensor.
I also don't know what your ECU is doing with that data so who knows what algo they are expecting and looking for.
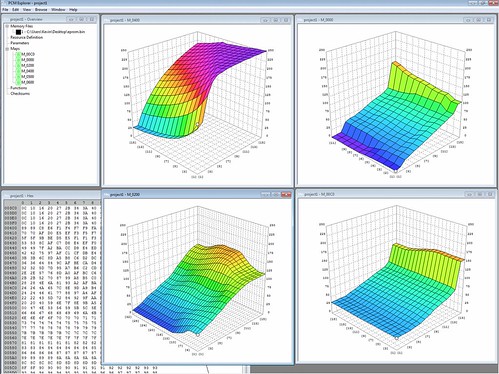
It's all map / look up table based:
And if you can believe it, people are still trying to decipher exactly what Honda was doing with the maps.
Best anyone's come up with is with all of the maps the vertical axis is injection volume and horizontal sloping down is RPM.
Horizontal sloping up is the tricky axis but it appears, and don't quote me on this...
... and sorry for not doing these left / right - top / bottom, but it should make more sense why I didn't after reading below:
(A) 3rd axis in top right is differential pressure between P1 (baro) & Pb (manifold pressure), and this map is the base fuel map used below a certain throttle opening angle;
(B) 3rd axis in bottom left is throttle angle over some pre-programmed angle, and this map is the base fuel map used above a certain throttle opening angle;
(C) 3rd axis in top left is pressure using P2 (charge / boost pressure) sensor;
(D) 3rd axis in bottom right atmospheric pressure P1 (barometric pressure) and is used under boost.
To summarize:
- the ECU operates in two different modes depending on throttle opening angle- speed density [map (A)] and alpha-N [map (B)];
- P1 sensor is used in conjunction with both maps;
- Pb is only used in [map (A)];
- P2 is only used in [map (B)].
Other things that have been determined:
- Pb sensor saturates (full output) at ~110 kPa;
- Pb and P1 are functionally equivalent and output the same voltages at the same pressures and can be interchanged;
- if Pb sensor fails, ECU goes into alpha-N mode and uses [map (B)];
- if P1 sensor fails, ECU fixes barometric pressure at 101 kPa
- P2 upper limit is ~240 kPa;
- if P2 sensor fails, ECU fixes P2 to 101 kPa, and also if the reading is not within tolerance for a given engine speed and throttle angle the ECU enters limp mode.
(Odd fact- pre-production demo units wastegates were set to ~21 PSI / 246 kPa but production units were set to 17.1 PSI / 217.6 kPa.)
Looks like Pb would be that BMP_OP header with a SPI interface. I only see the two outputs, but I believe you need 4 signals to the bike. I don't know what you would be generating on A_sample and B_sample. One might be Pb, or P1, or Pign. I see you needing at least 3 outputs, but probably 4 outputs.
Pb is required needed- it's a manifold sensor, not barometric. That is P1 and why the BMP_OP is there- it's "OPtional", and it's IIC/I2C, not SPI.
I only have two outputs because I was aiming at comparatively low cost and was thinking maybe variations with different routings which could be stacked, like an 'expansion board' to add two more outputs to be controlled by the MCU. Maybe I'll go towards two boards, one with MPX and DAC and the second with BMP_OP and DAC, or maybe one "sensor" board and one 4 out board. That's part of why I'm posting about this.
The A & B outputs are routed to ADC channels on the MCU. Intent is to have the MCU sample them for consistency / accuracy and fail-safe: if an output drifts the MCU might be able to correct it by adjusting the DAC or completely shut the DAC channel down. I haven't committed to this. I'll likely have a few boards fabbed and DNP that op-amp and related components then do testing to see if they should be added.
For MAP in and 5V sensing, I don't see why you need the op-amps, why not just resistor divide?
Valid question the best answer for which I have is it seems 'safer' to me.
You can lead the horticulture but you can't make them think.














{kind=link}