Food for thought:
Current development seems to be focused on two different areas:
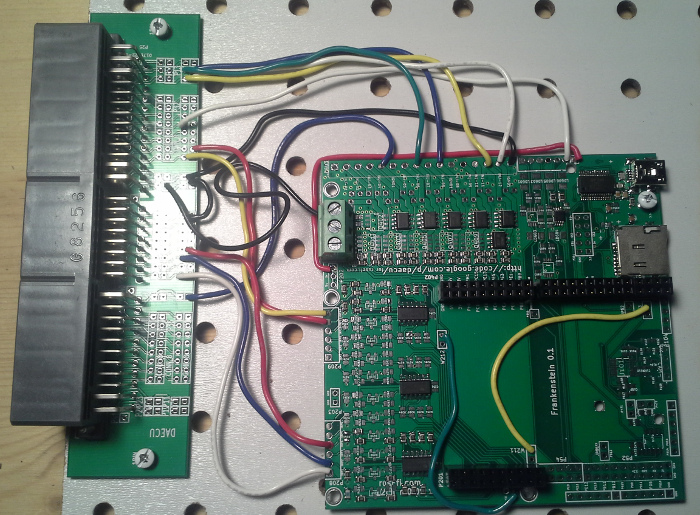
- I/O circuits on seperate evaluation boards
- Frankenso board (not a lot of development work seems to be going on right now)
- Lack of flexibility
- Circuit layout not yet optimal
- Designed for a specific brainboard
- Designed for a specific type housing and connector
- Limited real estate
- Too large to reflow in a toaster-oven
- ...
The I/O sub-boards should to a large extend have a unified architecture, so they can be replaced with one another easily. For example standard I/O boards for things like analog inputs, hi/lo drivers, lo-side power drivers, trigger sensors should all have the same base layout. My suggestion would be 4 inputs, 4 outputs, and the backbone connections: 5V, sanctioned 12V, Power GND and maybe signal GND. Another architecture would be needed for modules that communicate with the brain via SPI. I'm not sure if I would prefer the power supply as a separate module or directly on the main board.
I would also go back a step and have the main board without a vehicle connector and have the connector on a separate board that connects via pin headers or similar to the main board. This way customization for a specific vehicle is as simple as designing another patch/connector-board. No more messing around with jumper wires.
Advantages:
- Revisions of single function modules don't require revisions to the whole main board
- SMD assembly can be done on easily managed small boards using cheap Kapton stencils and toaster oven reflow (as long as all the SMD components are on the same surface)
- Simplified carrier board
- Mistakes are easier and cheaper to fix
- Future proof
- If you change cars, you don't have to remove jumpers and re-wire everything- just add a different connector-board
- We could offer specific pre-designed packages for different vehicles straight out of the box
- ...
I also wonder, what type of connections to use between the function-modules and the main board. Simple pin-headers seem to be working well so far, even on racecars. On the other hand PCB-edge connectors have the appeal of having the sub-boards standing on edge and thus using the third dimension a little more efficiently.
This is just food for thought. But if that's a possible route to take, I would suggest to design future prototype function modules with the idea of compatibility with this concept in mind.