

A LOT OF OUTDATED INFORMATION HERE
http://rusefi.com/wiki/index.php?title=Development:Software:connectivity
http://rusefi.com/wiki/index.php?title=Manual:Software:dev_console_commands
rusefi firmwave currently supports two protocols for ECU monitoring & control
1) human-readable native protocol - connect to the ECU using HyperTerminal or putty or our own java dev console.
2) TunerStudio protocol for integration with http://www.tunerstudio.com/ tuning software
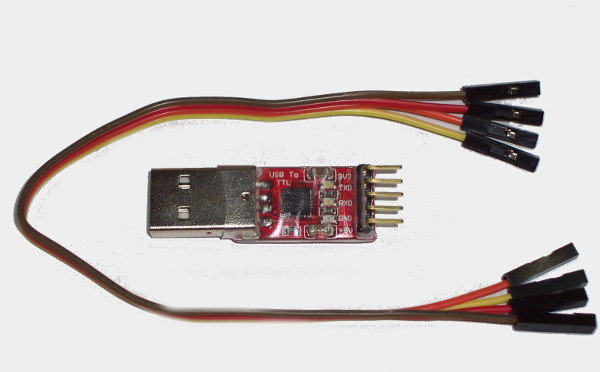
Both protocols can run either via the build-in USB controller (microUSB connection on the discovery board) or via USART working with a USB TTL device like http://rusefi.com/articles/tachometer_ts/uart.jpg
Two protocols cannot coexist on the same serial port, so in order to have both protocols you need to have two serial ports connected to the brain board at the same time, this is achieved by using build-in USB controller and a USB TTL module simultaneously.
Grounding pin PB1 controls which protocol uses which hardware.
No PB1<>GND jumper on startup: console is on USB.
With PB1<>GND jumper on startup: console is on UART.
By default we use USART3. TX is pin PC10 & RX is PC11
That's unless we are running build-in serial-over-USB (micro-USB in our case). Sometimes we have both at the same time, it's just that depending on the features.h either one or another is using the micro-USB while the other uses USART pins.
ST serial-over-usb driver is located at http://www.st.com/web/en/catalog/tools/PF257938
Here is a brief overview of the human-readable native protocol command. Just open your terminal application and start typing!
hello
prints the version of firmware
help
prints the list of supported commands
showconfig
Shows current configuration stored in the flash memory - that's where you can see your current fuel map etc.
resetconfig
Resets configuration to default
writeconfig
Write config to flash (you only need this if you have used one of the 'setXXX' commands)
tsinfo
Prints TunerStudio communication summary
rpm <new value>
For example
rpm 1200
Sets the RPM for build-in position sensor simulator
tempinfo
prints out some debug information on CLT and IAT sensors
Connectivity overview & build-in commands
-
AndreyB

- Site Admin
- Posts: 14332
- Joined: Wed Aug 28, 2013 1:28 am
- Location: Jersey City
- Github Username: rusefillc
- Slack: Andrey B

Connectivity overview & build-in commands
Very limited telepathic abilities - please post logs & tunes where appropriate - http://rusefi.com/s/questions
Always looking for C/C++/Java/PHP developers! Please help us see https://rusefi.com/s/howtocontribute
Always looking for C/C++/Java/PHP developers! Please help us see https://rusefi.com/s/howtocontribute
-
jedediah_frey
- contributor

- Posts: 51
- Joined: Tue Nov 05, 2013 1:43 pm
Re: Connectivity overview & build-in commands
For the 'human readable' part would you be interested in more of a 'live console' approach?russian wrote:Oh, by the way by default we use USART3. TX is pin PC10 & RX is PC11
I've dug through the console function and figured out how to bind to arrow keys and the like.
It'd be something similar to:
(But nowhere near as advanced right now). But what it would allow you to do is see a bunch of values live updated through console (if you didn't want to use TunerStudio)
-
AndreyB
- Site Admin
- Posts: 14332
- Joined: Wed Aug 28, 2013 1:28 am
- Location: Jersey City
- Github Username: rusefillc
- Slack: Andrey B
Re: Connectivity overview & build-in commands
New command:
set engine_type [engine_config_id]
For example,
Would change the configuration to the default Dodge Neon configuration. The IDs are visible in engines.h
You should reboot the firmware after changing engine type - hit the reset button or just power off/on the microcontroller.

set engine_type [engine_config_id]
For example,
Code: Select all
set engine_type 2You should reboot the firmware after changing engine type - hit the reset button or just power off/on the microcontroller.
Very limited telepathic abilities - please post logs & tunes where appropriate - http://rusefi.com/s/questions
Always looking for C/C++/Java/PHP developers! Please help us see https://rusefi.com/s/howtocontribute
Always looking for C/C++/Java/PHP developers! Please help us see https://rusefi.com/s/howtocontribute
-
AndreyB
- Site Admin
- Posts: 14332
- Joined: Wed Aug 28, 2013 1:28 am
- Location: Jersey City
- Github Username: rusefillc
- Slack: Andrey B
Re: Connectivity overview & build-in commands
fl 0
Turns-off constant dev console data output. fl 1 would turn it back on. ('fl' stands for 'full logging')
Turns-off constant dev console data output. fl 1 would turn it back on. ('fl' stands for 'full logging')
Very limited telepathic abilities - please post logs & tunes where appropriate - http://rusefi.com/s/questions
Always looking for C/C++/Java/PHP developers! Please help us see https://rusefi.com/s/howtocontribute
Always looking for C/C++/Java/PHP developers! Please help us see https://rusefi.com/s/howtocontribute
-
AndreyB
- Site Admin
- Posts: 14332
- Joined: Wed Aug 28, 2013 1:28 am
- Location: Jersey City
- Github Username: rusefillc
- Slack: Andrey B
Re: Connectivity overview & build-in commands
fuelbench ON_TIME OFF_TIME COUNTER
for example, fuelbench 4.1 5.8 60000
This command would send out a series of on/off squirts out to injector #1, this could be used while testing something like injector output
for example, fuelbench 4.1 5.8 60000
This command would send out a series of on/off squirts out to injector #1, this could be used while testing something like injector output
Code: Select all
Running fuel bench: ON_TIME=4.09999, OFF_TIME=5.80000. Counter=60000
INJECTOR_1_OUTPUT on PB9
Very limited telepathic abilities - please post logs & tunes where appropriate - http://rusefi.com/s/questions
Always looking for C/C++/Java/PHP developers! Please help us see https://rusefi.com/s/howtocontribute
Always looking for C/C++/Java/PHP developers! Please help us see https://rusefi.com/s/howtocontribute
-
AndreyB
- Site Admin
- Posts: 14332
- Joined: Wed Aug 28, 2013 1:28 am
- Location: Jersey City
- Github Username: rusefillc
- Slack: Andrey B
Re: Connectivity overview & build-in commands
New commands:
set_injection_pin_mode MODE
set_ignition_pin_mode MODE
set_idle_pin_mode MODE
set_fuel_pump_pin_mode MODE
set_malfunction_indicator_pin_mode MODE
For example,
set_idle_pin_mode 1
Currently four modes are supported:
OM_DEFAULT = 0 (GND for logical OFF, VCC for logical ON)
and
OM_INVERTED = 1 (GND for logical ON, VCC for logical OFF)
OM_OPENDRAIN = 2
OM_OPENDRAIN_INVERTED = 3
open drain modes should be added soon
set_injection_pin_mode MODE
set_ignition_pin_mode MODE
set_idle_pin_mode MODE
set_fuel_pump_pin_mode MODE
set_malfunction_indicator_pin_mode MODE
For example,
set_idle_pin_mode 1
Currently four modes are supported:
OM_DEFAULT = 0 (GND for logical OFF, VCC for logical ON)
and
OM_INVERTED = 1 (GND for logical ON, VCC for logical OFF)
OM_OPENDRAIN = 2
OM_OPENDRAIN_INVERTED = 3
open drain modes should be added soon
Very limited telepathic abilities - please post logs & tunes where appropriate - http://rusefi.com/s/questions
Always looking for C/C++/Java/PHP developers! Please help us see https://rusefi.com/s/howtocontribute
Always looking for C/C++/Java/PHP developers! Please help us see https://rusefi.com/s/howtocontribute
-
AndreyB
- Site Admin
- Posts: 14332
- Joined: Wed Aug 28, 2013 1:28 am
- Location: Jersey City
- Github Username: rusefillc
- Slack: Andrey B
Re: Connectivity overview & build-in commands
No, all you need is a micro-USB cable.acab wrote:For that command promt i need USB-SD module?
Do you realize that we have a simple java application for tuning rusEfi? It's the dev console. Feel free to improve it. But you can absolutely write a totally new one using .NET if you choose to do so.acab wrote:Can i try write simple DOTNET application for Tuning rusEFI?
Very limited telepathic abilities - please post logs & tunes where appropriate - http://rusefi.com/s/questions
Always looking for C/C++/Java/PHP developers! Please help us see https://rusefi.com/s/howtocontribute
Always looking for C/C++/Java/PHP developers! Please help us see https://rusefi.com/s/howtocontribute
-
AndreyB
- Site Admin
- Posts: 14332
- Joined: Wed Aug 28, 2013 1:28 am
- Location: Jersey City
- Github Username: rusefillc
- Slack: Andrey B
Re: Connectivity overview & build-in commands
Can someone please confirm that I am right:
in open_drain, logical 0 is floating and logical 1 is GND, right?
in open_drain, logical 0 is floating and logical 1 is GND, right?
Very limited telepathic abilities - please post logs & tunes where appropriate - http://rusefi.com/s/questions
Always looking for C/C++/Java/PHP developers! Please help us see https://rusefi.com/s/howtocontribute
Always looking for C/C++/Java/PHP developers! Please help us see https://rusefi.com/s/howtocontribute

Re: Connectivity overview & build-in commands
Yes. Control logic is inverted and the output is high in the default state.
Re: Connectivity overview & build-in commands
what's the default baud rate and parity settings? don't know how to set up my bluetooth HC-06 module to 115000
UPD. found it - #define SERIAL_SPEED 115200 (in features.h)
UPD. found it - #define SERIAL_SPEED 115200 (in features.h)
Re: Connectivity overview & build-in commands
Weird stuff. I just set my BT module to 115000 baud rate. It passed the internal test of the TunerStudio. However, when I open the project with that rusefi.ini file, after three attempts it pops up with the following message:
Error reading data from after 3 attempts
Error message returned:
Serial Failure, Unable to get all pages of data after multiple attempts.
Application will now go offline, etc…
I tried to open that port directly from my console, using screen command, typing 'help' returned nothing, although when I press uppercase 'H' (with shift) it returns 'MShift v0.01'. I checked other keystrokes. Seems, the only other symbol is 't' or 'T', which return 'Alive' with CR
upper 'O' gives back an unreadable string '�(�B"�A���?��IA@A��z�'
Error reading data from after 3 attempts
Error message returned:
Serial Failure, Unable to get all pages of data after multiple attempts.
Application will now go offline, etc…
I tried to open that port directly from my console, using screen command, typing 'help' returned nothing, although when I press uppercase 'H' (with shift) it returns 'MShift v0.01'. I checked other keystrokes. Seems, the only other symbol is 't' or 'T', which return 'Alive' with CR
upper 'O' gives back an unreadable string '�(�B"�A���?��IA@A��z�'
-
AndreyB
- Site Admin
- Posts: 14332
- Joined: Wed Aug 28, 2013 1:28 am
- Location: Jersey City
- Github Username: rusefillc
- Slack: Andrey B
Re: Connectivity overview & build-in commands
I bet that what you are experiencing is a mismatch between the rusefi.ini version and the firmware version. Also, at some point there was a bug related to reading the whole tune.
A simple way to test would be to use 'tsinfo' command on the human-readable port - it would tell you the data structure size. This size should match the size in rusefi.ini. Right now the size is 2992. If one of your sizes is not 2992, I think you need to get the latest version - do you compile from SVN trunk?
A simple way to test would be to use 'tsinfo' command on the human-readable port - it would tell you the data structure size. This size should match the size in rusefi.ini. Right now the size is 2992. If one of your sizes is not 2992, I think you need to get the latest version - do you compile from SVN trunk?
Very limited telepathic abilities - please post logs & tunes where appropriate - http://rusefi.com/s/questions
Always looking for C/C++/Java/PHP developers! Please help us see https://rusefi.com/s/howtocontribute
Always looking for C/C++/Java/PHP developers! Please help us see https://rusefi.com/s/howtocontribute
Re: Connectivity overview & build-in commands
Man! I just used the .elf file that you gave me yesterday. The .ini file for the tuner studio is from firmware rusefi.r1008.
May be TS is buggy? Mine is 2.0.4 - or 2.5.05 - I didn't get it.
as for 'tsinfo' command - it returns the same 'alive' response, no matter whether I try typing it in the console symbol by symbol or paste the whole buffer…
May be TS is buggy? Mine is 2.0.4 - or 2.5.05 - I didn't get it.
as for 'tsinfo' command - it returns the same 'alive' response, no matter whether I try typing it in the console symbol by symbol or paste the whole buffer…
-
AndreyB
- Site Admin
- Posts: 14332
- Joined: Wed Aug 28, 2013 1:28 am
- Location: Jersey City
- Github Username: rusefillc
- Slack: Andrey B
Re: Connectivity overview & build-in commands
Q: what does this error message mean?

A: it means you are connecting Tuner Studio to human-readable protocol. You need to either use another version of the firmware with different serial mapping or use a USB TTL device and install the second serial port. I did mention that we use two protocols couple of times, right?
A: it means you are connecting Tuner Studio to human-readable protocol. You need to either use another version of the firmware with different serial mapping or use a USB TTL device and install the second serial port. I did mention that we use two protocols couple of times, right?
Very limited telepathic abilities - please post logs & tunes where appropriate - http://rusefi.com/s/questions
Always looking for C/C++/Java/PHP developers! Please help us see https://rusefi.com/s/howtocontribute
Always looking for C/C++/Java/PHP developers! Please help us see https://rusefi.com/s/howtocontribute
Re: Connectivity overview & build-in commands
As for my problem, updating the rusefi.ini file helped me solve it, thanks a lot! It works just fine, though, air/fuel gauge is wobbling at 12,5-12,8 with no sensors connected 
Still a bit confused with all those serial ports. Does it mean in this setup Discovery board has two pairs of pins for two different serial ports? Right now I am using PD8/PD9 for TunerStudio, and it's not human-readable. Does it mean, human readable port is on microusb? Why do I need a USB TTL device, why not use microusb port directly? As far as I know, there are implementations of serial-over-usb.
Still a bit confused with all those serial ports. Does it mean in this setup Discovery board has two pairs of pins for two different serial ports? Right now I am using PD8/PD9 for TunerStudio, and it's not human-readable. Does it mean, human readable port is on microusb? Why do I need a USB TTL device, why not use microusb port directly? As far as I know, there are implementations of serial-over-usb.
-
AndreyB
- Site Admin
- Posts: 14332
- Joined: Wed Aug 28, 2013 1:28 am
- Location: Jersey City
- Github Username: rusefillc
- Slack: Andrey B
Re: Connectivity overview & build-in commands
Yes human readable port is on microusb. Yes two serial ports - with separate purposes. TS is better for tuning, HR (human-readable) is better for development. We are in the development phase so the convenient microusb is used for HR.puff wrote:Still a bit confused with all those serial ports...
Very limited telepathic abilities - please post logs & tunes where appropriate - http://rusefi.com/s/questions
Always looking for C/C++/Java/PHP developers! Please help us see https://rusefi.com/s/howtocontribute
Always looking for C/C++/Java/PHP developers! Please help us see https://rusefi.com/s/howtocontribute
-
AndreyB
- Site Admin
- Posts: 14332
- Joined: Wed Aug 28, 2013 1:28 am
- Location: Jersey City
- Github Username: rusefillc
- Slack: Andrey B
Re: Connectivity overview & build-in commands
New command: cranking fuel adjustment
set_cranking_fuel_min TIME_MS TEMP_C
set_cranking_fuel_max TIME_MS TEMP_C
For example
set_cranking_fuel_min 20 0
Would mean that at and below 0C we should inject fuel for 20ms
We need more fuel while engine cranking, current implementation uses linear interpolation based on two point - 'min temperature' point and 'max temperature' point. The temperatures are in C.
set_cranking_fuel_min TIME_MS TEMP_C
set_cranking_fuel_max TIME_MS TEMP_C
For example
set_cranking_fuel_min 20 0
Would mean that at and below 0C we should inject fuel for 20ms
We need more fuel while engine cranking, current implementation uses linear interpolation based on two point - 'min temperature' point and 'max temperature' point. The temperatures are in C.
Very limited telepathic abilities - please post logs & tunes where appropriate - http://rusefi.com/s/questions
Always looking for C/C++/Java/PHP developers! Please help us see https://rusefi.com/s/howtocontribute
Always looking for C/C++/Java/PHP developers! Please help us see https://rusefi.com/s/howtocontribute
-
AndreyB
- Site Admin
- Posts: 14332
- Joined: Wed Aug 28, 2013 1:28 am
- Location: Jersey City
- Github Username: rusefillc
- Slack: Andrey B
Re: Connectivity overview & build-in commands
In order to totally confuse everyone I've added some into the wiki:
http://rusefi.com/wiki/index.php?title=Manual:Software
http://rusefi.com/wiki/index.php?title=Manual:Engine_Type
http://rusefi.com/wiki/index.php?title=Manual:Software
http://rusefi.com/wiki/index.php?title=Manual:Engine_Type
Very limited telepathic abilities - please post logs & tunes where appropriate - http://rusefi.com/s/questions
Always looking for C/C++/Java/PHP developers! Please help us see https://rusefi.com/s/howtocontribute
Always looking for C/C++/Java/PHP developers! Please help us see https://rusefi.com/s/howtocontribute
-
AndreyB
- Site Admin
- Posts: 14332
- Joined: Wed Aug 28, 2013 1:28 am
- Location: Jersey City
- Github Username: rusefillc
- Slack: Andrey B
Re: Connectivity overview & build-in commands
help command now works in dev console
Very limited telepathic abilities - please post logs & tunes where appropriate - http://rusefi.com/s/questions
Always looking for C/C++/Java/PHP developers! Please help us see https://rusefi.com/s/howtocontribute
Always looking for C/C++/Java/PHP developers! Please help us see https://rusefi.com/s/howtocontribute
-
AndreyB
- Site Admin
- Posts: 14332
- Joined: Wed Aug 28, 2013 1:28 am
- Location: Jersey City
- Github Username: rusefillc
- Slack: Andrey B
Re: Connectivity overview & build-in commands
Because of Frankenstein layout, Tuner Studio default pins are now different: TX is pin PC10 & RX is PC11
Very limited telepathic abilities - please post logs & tunes where appropriate - http://rusefi.com/s/questions
Always looking for C/C++/Java/PHP developers! Please help us see https://rusefi.com/s/howtocontribute
Always looking for C/C++/Java/PHP developers! Please help us see https://rusefi.com/s/howtocontribute
-
AndreyB
- Site Admin
- Posts: 14332
- Joined: Wed Aug 28, 2013 1:28 am
- Location: Jersey City
- Github Username: rusefillc
- Slack: Andrey B
Re: Connectivity overview & build-in commands
I will now move part of the posts into http://rusefi.com/forum/viewtopic.php?t=493
Very limited telepathic abilities - please post logs & tunes where appropriate - http://rusefi.com/s/questions
Always looking for C/C++/Java/PHP developers! Please help us see https://rusefi.com/s/howtocontribute
Always looking for C/C++/Java/PHP developers! Please help us see https://rusefi.com/s/howtocontribute
Re: Connectivity overview & build-in commands
I got this list using Hyper Terminal and typing "help". I've added the descriptions I could find. Are there descriptions available for the ones I've missed?
msg, help: 0 parameters, prints the list of supported commands
msg, echo: 1 parameters,
msg, hello: 0 parameters, prints the version of firmware
msg, fatal: 0 parameters,
msg, ths: 0 parameters,
msg, showconfig: 0 parameters, Shows current configuration stored in the flash memory - that's where you can see your current fuel map etc.
msg, readconfig: 0 parameters,
msg, writeconfig: 0 parameters, Write config to flash (you only need this if you have used one of the 'setXXX' commands)
msg, resetconfig: 0 parameters, Resets configuration to default
msg, date_get: 0 parameters,
msg, date_set: 3 parameters,
msg, date_help: 0 parameters,
msg, adcDebug: 1 parameters,
msg, adc: 1 parameters,
msg, fadc: 0 parameters,
msg, sdinfo: 0 parameters,
msg, mountsd: 0 parameters,
msg, appendToLog: 3 parameters,
msg, umountsd: 0 parameters,
msg, ls: 3 parameters,
msg, gpsinfo: 0 parameters,
msg, i2c: 5 parameters,
msg, sfm: 5 parameters,
msg, fl: 1 parameters, Turns-off constant dev console data output. fl 1 would turn it back on. ('fl' stands for 'full logging')
msg, status: 0 parameters,
msg, set_ignition_offset: 1 parameters,
msg, set_global_trigger_offset_angle: 1 parameters,
msg, set_analog_chart_mode: 1 parameters,
msg, set_fixed_mode_timing: 1 parameters,
msg, set_timing_mode: 1 parameters,
msg, set_engine_type: 1 parameters, Would change the configuration to the default Dodge Neon configuration.
You should reboot the firmware after changing engine type - hit the reset button or just power off/on the microcontroller.
msg, set_injection_pin_mode: 1 parameters,
msg, set_ignition_pin_mode: 1parameters,
msg, set_idle_pin_mode: 1 parameters, For example, set_idle_pin_mode 1
Currently four modes are supported:
OM_DEFAULT = 0 (GND for logical OFF, VCC for logical ON)
and
OM_INVERTED = 1 (GND for logical ON, VCC for logical OFF)
OM_OPENDRAIN = 2
OM_OPENDRAIN_INVERTED = 3
msg, set_fuel_pump_pin_mode: 1 parameters,
msg, set_malfunction_indicator_pin_mode: 1 parameters,
msg, set_rpm_multiplier: 1 parameters,
msg, set_cranking_fuel_min: 5 parameters, For example set_cranking_fuel_min 20 0
Would mean that at and below 0C we should inject fuel for 20ms
We need more fuel while engine cranking, current implementation uses linear interpolation based on two point - 'min temperature' point and 'max temperature' point. The temperatures are in C.
msg, set_cranking_fuel_max: 5 parameters,
msg, chartsize: 1 parameters,
msg, chart: 1 parameters,
msg, wm: 5 parameters,
msg, tsinfo 0 parameters, Prints TunerStudio communication summary
msg, injector: 5 parameters,
msg, gfc: 1 parameters,
msg, fuelbench: 4 parameters, for example, fuelbench 4.1 5.8 60000This command would send out a series of on/off squirts out to injector #1, this could be used while testing something like injector output
msg, faststat: 0 parameters,
msg, trigger_hist: 0 parameters,
msg, tempinfo: 0 parameters, prints out some debug information on CLT and IAT sensors
msg, testmath: 1 parameters,
msg, rpm: 1 parameters, For example, rpm 1200 sets the RPM for build-in position sensor simulator
msg, help: 0 parameters, prints the list of supported commands
msg, echo: 1 parameters,
msg, hello: 0 parameters, prints the version of firmware
msg, fatal: 0 parameters,
msg, ths: 0 parameters,
msg, showconfig: 0 parameters, Shows current configuration stored in the flash memory - that's where you can see your current fuel map etc.
msg, readconfig: 0 parameters,
msg, writeconfig: 0 parameters, Write config to flash (you only need this if you have used one of the 'setXXX' commands)
msg, resetconfig: 0 parameters, Resets configuration to default
msg, date_get: 0 parameters,
msg, date_set: 3 parameters,
msg, date_help: 0 parameters,
msg, adcDebug: 1 parameters,
msg, adc: 1 parameters,
msg, fadc: 0 parameters,
msg, sdinfo: 0 parameters,
msg, mountsd: 0 parameters,
msg, appendToLog: 3 parameters,
msg, umountsd: 0 parameters,
msg, ls: 3 parameters,
msg, gpsinfo: 0 parameters,
msg, i2c: 5 parameters,
msg, sfm: 5 parameters,
msg, fl: 1 parameters, Turns-off constant dev console data output. fl 1 would turn it back on. ('fl' stands for 'full logging')
msg, status: 0 parameters,
msg, set_ignition_offset: 1 parameters,
msg, set_global_trigger_offset_angle: 1 parameters,
msg, set_analog_chart_mode: 1 parameters,
msg, set_fixed_mode_timing: 1 parameters,
msg, set_timing_mode: 1 parameters,
msg, set_engine_type: 1 parameters, Would change the configuration to the default Dodge Neon configuration.
You should reboot the firmware after changing engine type - hit the reset button or just power off/on the microcontroller.
msg, set_injection_pin_mode: 1 parameters,
msg, set_ignition_pin_mode: 1parameters,
msg, set_idle_pin_mode: 1 parameters, For example, set_idle_pin_mode 1
Currently four modes are supported:
OM_DEFAULT = 0 (GND for logical OFF, VCC for logical ON)
and
OM_INVERTED = 1 (GND for logical ON, VCC for logical OFF)
OM_OPENDRAIN = 2
OM_OPENDRAIN_INVERTED = 3
msg, set_fuel_pump_pin_mode: 1 parameters,
msg, set_malfunction_indicator_pin_mode: 1 parameters,
msg, set_rpm_multiplier: 1 parameters,
msg, set_cranking_fuel_min: 5 parameters, For example set_cranking_fuel_min 20 0
Would mean that at and below 0C we should inject fuel for 20ms
We need more fuel while engine cranking, current implementation uses linear interpolation based on two point - 'min temperature' point and 'max temperature' point. The temperatures are in C.
msg, set_cranking_fuel_max: 5 parameters,
msg, chartsize: 1 parameters,
msg, chart: 1 parameters,
msg, wm: 5 parameters,
msg, tsinfo 0 parameters, Prints TunerStudio communication summary
msg, injector: 5 parameters,
msg, gfc: 1 parameters,
msg, fuelbench: 4 parameters, for example, fuelbench 4.1 5.8 60000This command would send out a series of on/off squirts out to injector #1, this could be used while testing something like injector output
msg, faststat: 0 parameters,
msg, trigger_hist: 0 parameters,
msg, tempinfo: 0 parameters, prints out some debug information on CLT and IAT sensors
msg, testmath: 1 parameters,
msg, rpm: 1 parameters, For example, rpm 1200 sets the RPM for build-in position sensor simulator
Robert
1995 Ford E-150, 300 CID I6 E4OD, Custom MS1-Extra
1992 Winnebago Elante 33 RQ, Ford 460 CID V8, E4OD, Custom MS1-Extra
1992 Bayliner 3288, Twin Ford 351CID Windsor V8s, Custom MS1-Extra
1995 Dodge Ram 2500 4x4 488 CID V10 5 spd. MS3 (in progress)
1995 Ford E-150, 300 CID I6 E4OD, Custom MS1-Extra
1992 Winnebago Elante 33 RQ, Ford 460 CID V8, E4OD, Custom MS1-Extra
1992 Bayliner 3288, Twin Ford 351CID Windsor V8s, Custom MS1-Extra
1995 Dodge Ram 2500 4x4 488 CID V10 5 spd. MS3 (in progress)
-
AndreyB
- Site Admin
- Posts: 14332
- Joined: Wed Aug 28, 2013 1:28 am
- Location: Jersey City
- Github Username: rusefillc
- Slack: Andrey B
Re: Connectivity overview & build-in commands
Robert, this is pretty helpful!
I've started a wiki page for all the commands - I've added a couple more descriptions: http://rusefi.com/wiki/index.php?title=Manual:Software:dev_console_commands
I've started a wiki page for all the commands - I've added a couple more descriptions: http://rusefi.com/wiki/index.php?title=Manual:Software:dev_console_commands
Very limited telepathic abilities - please post logs & tunes where appropriate - http://rusefi.com/s/questions
Always looking for C/C++/Java/PHP developers! Please help us see https://rusefi.com/s/howtocontribute
Always looking for C/C++/Java/PHP developers! Please help us see https://rusefi.com/s/howtocontribute
Re: Connectivity overview & build-in commands
Good. Glad to be of assistance. I see your additions so I'll play around with them.
I've also written up a bit of a ".hex file loading cheat sheet" for my own use, but maybe it could be incorporated into some more comprehensive instructions.
How to get and load the latest rusEFI .hex file:
1: - Go to the rusEFI.com web site
2: - Click the “Manual-Software” button. This brings up a software manual page. In the line of text “once you get the brain board you will need to program it with the rusEFI firmware binary file. More about that here”.
3: - Click “here” link. This brings you to the thread “Setting up the board with pre-compiled binaries” This thread has instructions on how to download and use the STM32 ST-Link Utility with which to load the .hex file into Discovery.
4: - In the first line in the first post of the thread, click the “build-server” link. This brings up a link to the rusEFI consol.jar and rusEFI firmware.zip.
rusEFI consol is a utility that you can use to communicate with Discovery. It can live at whatever location you download it to. A shortcut on your desktop will allow you to run it from your desktop.
rusEFI firmware.zip contains the latest firmware .hex file and configuration settings for Tuner Studio. Create a folder for rusEFI stuff and unzip it here.
5: - To load the file into Discovery connect both the power and communication USB cables to your computer. Open the STM32 ST-Link Utility. Go to “File” . “Open” and select the .hex file in your rusEFI folder. Click the “Program and Verify” button. The process takes several seconds and if successful will report so on the screen.
That’s it.
I've also written up a bit of a ".hex file loading cheat sheet" for my own use, but maybe it could be incorporated into some more comprehensive instructions.
How to get and load the latest rusEFI .hex file:
1: - Go to the rusEFI.com web site
2: - Click the “Manual-Software” button. This brings up a software manual page. In the line of text “once you get the brain board you will need to program it with the rusEFI firmware binary file. More about that here”.
3: - Click “here” link. This brings you to the thread “Setting up the board with pre-compiled binaries” This thread has instructions on how to download and use the STM32 ST-Link Utility with which to load the .hex file into Discovery.
4: - In the first line in the first post of the thread, click the “build-server” link. This brings up a link to the rusEFI consol.jar and rusEFI firmware.zip.
rusEFI consol is a utility that you can use to communicate with Discovery. It can live at whatever location you download it to. A shortcut on your desktop will allow you to run it from your desktop.
rusEFI firmware.zip contains the latest firmware .hex file and configuration settings for Tuner Studio. Create a folder for rusEFI stuff and unzip it here.
5: - To load the file into Discovery connect both the power and communication USB cables to your computer. Open the STM32 ST-Link Utility. Go to “File” . “Open” and select the .hex file in your rusEFI folder. Click the “Program and Verify” button. The process takes several seconds and if successful will report so on the screen.
That’s it.
Robert
1995 Ford E-150, 300 CID I6 E4OD, Custom MS1-Extra
1992 Winnebago Elante 33 RQ, Ford 460 CID V8, E4OD, Custom MS1-Extra
1992 Bayliner 3288, Twin Ford 351CID Windsor V8s, Custom MS1-Extra
1995 Dodge Ram 2500 4x4 488 CID V10 5 spd. MS3 (in progress)
1995 Ford E-150, 300 CID I6 E4OD, Custom MS1-Extra
1992 Winnebago Elante 33 RQ, Ford 460 CID V8, E4OD, Custom MS1-Extra
1992 Bayliner 3288, Twin Ford 351CID Windsor V8s, Custom MS1-Extra
1995 Dodge Ram 2500 4x4 488 CID V10 5 spd. MS3 (in progress)
-
AndreyB
- Site Admin
- Posts: 14332
- Joined: Wed Aug 28, 2013 1:28 am
- Location: Jersey City
- Github Username: rusefillc
- Slack: Andrey B
Re: Connectivity overview & build-in commands
The Manual:Software link is probably gone now, but it is replaces by a better 'wiki - Soft U Manual' link in the left navigation pane of www.rusefi.com
miniUSB is both power and programming. micorUSB is only dev console communication, without the power.
miniUSB is both power and programming. micorUSB is only dev console communication, without the power.
Very limited telepathic abilities - please post logs & tunes where appropriate - http://rusefi.com/s/questions
Always looking for C/C++/Java/PHP developers! Please help us see https://rusefi.com/s/howtocontribute
Always looking for C/C++/Java/PHP developers! Please help us see https://rusefi.com/s/howtocontribute

Re: Connectivity overview & build-in commands
Looks like we broke his instructions. Hopefully this helps.
Load firmware is now assimilated http://rusefi.com/wiki/index.php?title=Manual:Software:User/en#Load_firmware
Dev Console is now assimilated http://rusefi.com/wiki/index.php?title=Manual:Software:User/en#Dev_Console
Load firmware is now assimilated http://rusefi.com/wiki/index.php?title=Manual:Software:User/en#Load_firmware
Dev Console is now assimilated http://rusefi.com/wiki/index.php?title=Manual:Software:User/en#Dev_Console
Welcome to the friendlier side of internet crazy
-
AndreyB
- Site Admin
- Posts: 14332
- Joined: Wed Aug 28, 2013 1:28 am
- Location: Jersey City
- Github Username: rusefillc
- Slack: Andrey B
Re: Connectivity overview & build-in commands
tss renamed to tsinfo
new command - lcdinfo
new command - lcdinfo
Very limited telepathic abilities - please post logs & tunes where appropriate - http://rusefi.com/s/questions
Always looking for C/C++/Java/PHP developers! Please help us see https://rusefi.com/s/howtocontribute
Always looking for C/C++/Java/PHP developers! Please help us see https://rusefi.com/s/howtocontribute
-
AndreyB
- Site Admin
- Posts: 14332
- Joined: Wed Aug 28, 2013 1:28 am
- Location: Jersey City
- Github Username: rusefillc
- Slack: Andrey B
Re: Connectivity overview & build-in commands
analoginfo
Brief analog inputs report. This command reports voltage taking current divider settings into account.

Brief analog inputs report. This command reports voltage taking current divider settings into account.
Very limited telepathic abilities - please post logs & tunes where appropriate - http://rusefi.com/s/questions
Always looking for C/C++/Java/PHP developers! Please help us see https://rusefi.com/s/howtocontribute
Always looking for C/C++/Java/PHP developers! Please help us see https://rusefi.com/s/howtocontribute
-
AndreyB
- Site Admin
- Posts: 14332
- Joined: Wed Aug 28, 2013 1:28 am
- Location: Jersey City
- Github Username: rusefillc
- Slack: Andrey B
Re: Connectivity overview & build-in commands
It is now possible to control which protocol would be activated on microUSB, and which one would be activated on the UART:
reset while not holding the blue button - dev console would be using USB and TunerStudio would be using UART
hold the blue button while resetting - TunerStudio would be activated on the USB and dev console on the UART
reset while not holding the blue button - dev console would be using USB and TunerStudio would be using UART
hold the blue button while resetting - TunerStudio would be activated on the USB and dev console on the UART
Very limited telepathic abilities - please post logs & tunes where appropriate - http://rusefi.com/s/questions
Always looking for C/C++/Java/PHP developers! Please help us see https://rusefi.com/s/howtocontribute
Always looking for C/C++/Java/PHP developers! Please help us see https://rusefi.com/s/howtocontribute


{kind=link}
Re: Connectivity overview & build-in commands
you sure?By default we use USART3. TX is pin PC10 & RX is PC11
Code: Select all
firmware / config / boards / arro_board.h
#define EFI_CONSOLE_UART_DEVICE (&SD3)
#define EFI_CONSOLE_TX_PORT GPIOC
#define EFI_CONSOLE_TX_PIN 10
#define EFI_CONSOLE_RX_PORT GPIOC
#define EFI_CONSOLE_RX_PIN 11
#define EFI_CONSOLE_AF 7
#define TS_SERIAL_TX_PORT GPIOC
#define TS_SERIAL_TX_PIN 10
#define TS_SERIAL_RX_PORT GPIOC
#define TS_SERIAL_RX_PIN 11
#define TS_SERIAL_AF 7