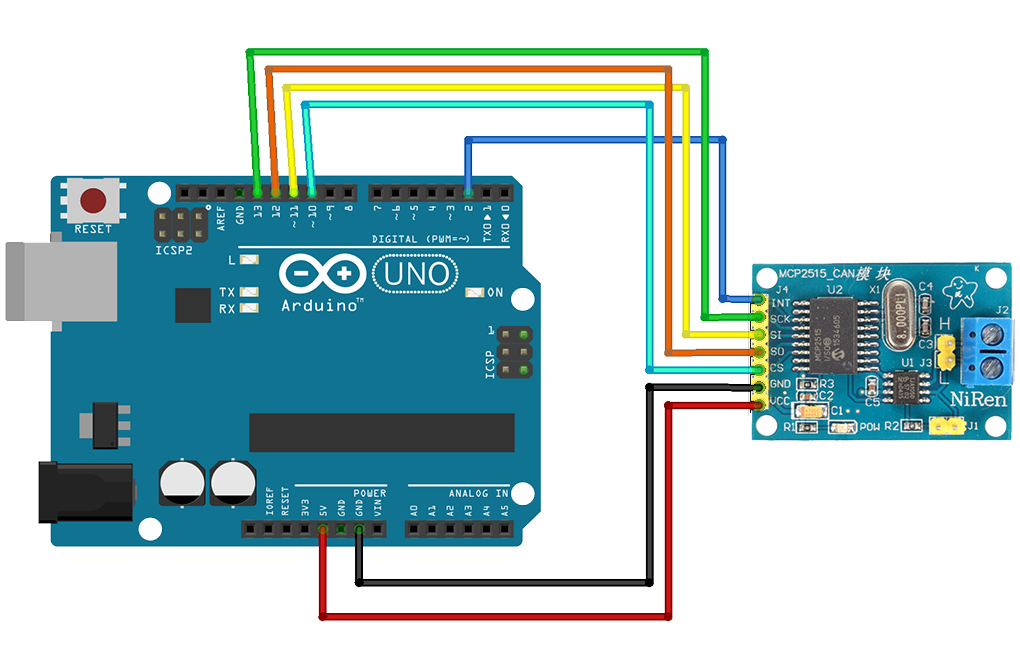
uno r3 and mc2515 conect to fankenso canbus
it can connect to 2515, ok.
iso15765-4 i don't know bit and kband.
Code: Select all
/*************************************************************************************************
OBD-II_PIDs TEST CODE
LOOVEE @ JUN24, 2017
Query
send id: 0x7df
dta: 0x02, 0x01, PID_CODE, 0, 0, 0, 0, 0
Response
From id: 0x7E9 or 0x7EA or 0x7EB
dta: len, 0x41, PID_CODE, byte0, byte1(option), byte2(option), byte3(option), byte4(option)
https://en.wikipedia.org/wiki/OBD-II_PIDs
Input a PID, then you will get reponse from vehicle, the input should be end with '\n'
***************************************************************************************************/
#include <SPI.h>
#include "mcp_can.h"
// the cs pin of the version after v1.1 is default to D9
// v0.9b and v1.0 is default D10
const int SPI_CS_PIN = 9;
MCP_CAN CAN(SPI_CS_PIN); // Set CS pin
#define PID_ENGIN_PRM 0x0C
#define PID_VEHICLE_SPEED 0x0D
#define PID_COOLANT_TEMP 0x05
#define CAN_ID_PID 0x7DF
unsigned char PID_INPUT;
unsigned char getPid = 0;
void set_mask_filt()
{
/*
* set mask, set both the mask to 0x3ff
*/
CAN.init_Mask(0, 0, 0x7FC);
CAN.init_Mask(1, 0, 0x7FC);
/*
* set filter, we can receive id from 0x04 ~ 0x09
*/
CAN.init_Filt(0, 0, 0x7E8);
CAN.init_Filt(1, 0, 0x7E8);
CAN.init_Filt(2, 0, 0x7E8);
CAN.init_Filt(3, 0, 0x7E8);
CAN.init_Filt(4, 0, 0x7E8);
CAN.init_Filt(5, 0, 0x7E8);
}
void sendPid(unsigned char __pid)
{
unsigned char tmp[8] = {0x02, 0x01, __pid, 0, 0, 0, 0, 0};
Serial.print("SEND PID: 0x");
Serial.println(__pid, HEX);
CAN.sendMsgBuf(CAN_ID_PID, 0, 8, tmp);
}
void setup()
{
Serial.begin(115200);
while (CAN_OK != CAN.begin(CAN_500KBPS)) // init can bus : baudrate = 500k
{
Serial.println("CAN BUS Shield init fail");
Serial.println(" Init CAN BUS Shield again");
delay(100);
}
Serial.println("CAN BUS Shield init ok!");
set_mask_filt();
}
void loop()
{
taskCanRecv();
taskDbg();
if(getPid) // GET A PID
{
getPid = 0;
sendPid(PID_INPUT);
PID_INPUT = 0;
}
}
void taskCanRecv()
{
unsigned char len = 0;
unsigned char buf[8];
if(CAN_MSGAVAIL == CAN.checkReceive()) // check if get data
{
CAN.readMsgBuf(&len, buf); // read data, len: data length, buf: data buf
Serial.println("\r\n------------------------------------------------------------------");
Serial.print("Get Data From id: ");
Serial.println(CAN.getCanId(), HEX);
for(int i = 0; i<len; i++) // print the data
{
Serial.print("0x");
Serial.print(buf[i], HEX);
Serial.print("\t");
}
Serial.println();
}
}
void taskDbg()
{
while(Serial.available())
{
char c = Serial.read();
if(c>='0' && c<='9')
{
PID_INPUT *= 0x10;
PID_INPUT += c-'0';
}
else if(c>='A' && c<='F')
{
PID_INPUT *= 0x10;
PID_INPUT += 10+c-'A';
}
else if(c>='a' && c<='f')
{
PID_INPUT *= 0x10;
PID_INPUT += 10+c-'a';
}
else if(c == '\n') // END
{
getPid = 1;
}
}
}
// END FILE
out put
Code: Select all
------------------------------------------------------------------
Get Data From id: 499
0x49 0x24
------------------------------------------------------------------
Get Data From id: 499
0x49 0x24
------------------------------------------------------------------
Get Data From id: 499
0x49 0x24
------------------------------------------------------------------
Get Data From id: 499
0x49 0x24
------------------------------------------------------------------
Get Data From id: 499
0x49 0x24
------------------------------------------------------------------
Get Data From id: 499
0x49 0x24







