Detailed Description
Definition in file map.h.
Functions | |
| void | initMapDecoder () |
Function Documentation
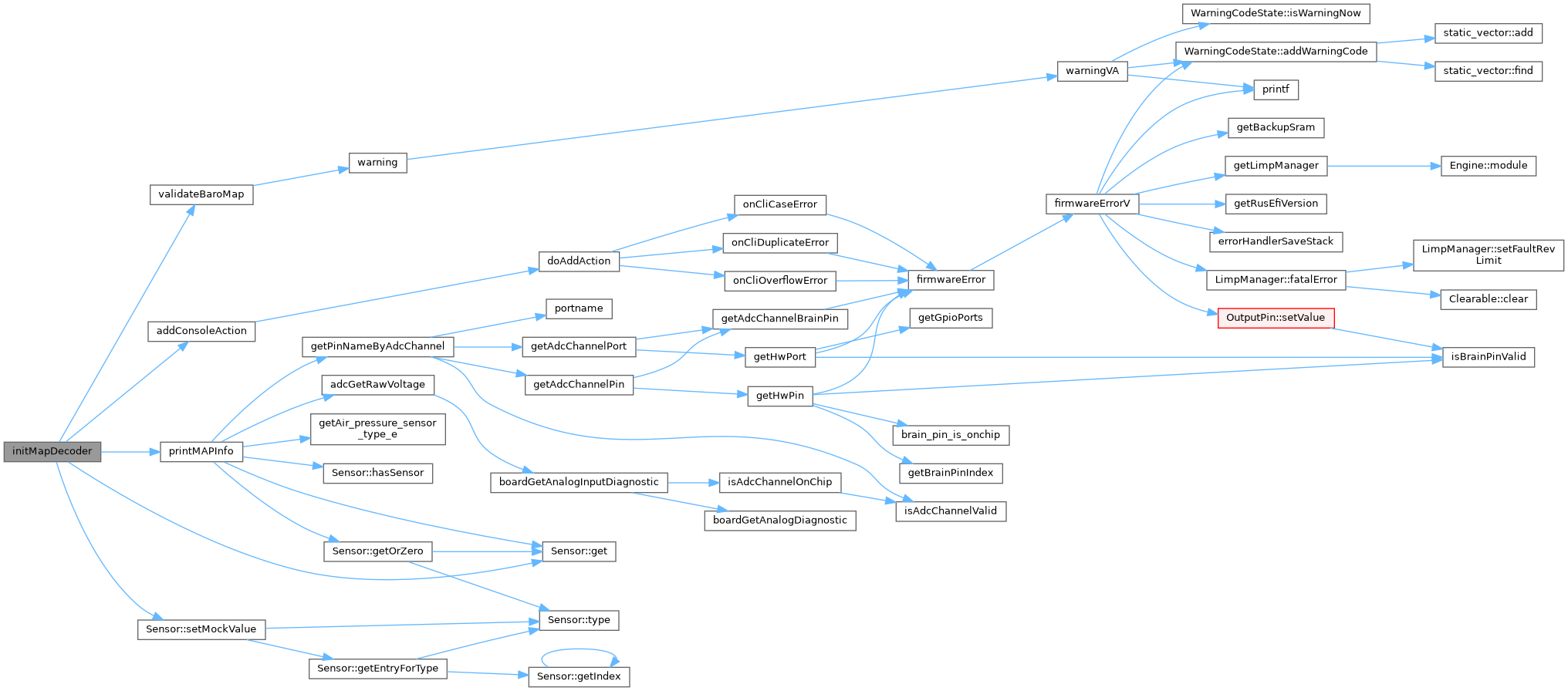
◆ initMapDecoder()
| void initMapDecoder | ( | ) |
Definition at line 68 of file map.cpp.
static void setMockValue(SensorType type, float value, bool mockRedundant=false)
Definition: sensor.cpp:203
virtual SensorResult get() const =0
void addConsoleAction(const char *token, Void callback)
Register console action without parameters.
Definition: cli_registry.cpp:86
@ MapSlow
@ BarometricPressure
bool useFixedBaroCorrFromMap
Referenced by initSensors().
Here is the call graph for this function:
Here is the caller graph for this function:
