Detailed Description
Linear interpolation algorithms.
See test_interpolation_3d.cpp
- Date
- Oct 17, 2013
Definition in file interpolation.cpp.
Functions | |
| float | interpolateMsg (const char *msg, float x1, float y1, float x2, float y2, float x) |
| Linear interpolation by two points. | |
| float | interpolateClampedWithValidation (float x1, float y1, float x2, float y2, float x) |
| float | interpolateClamped (float x1, float y1, float x2, float y2, float x) |
Function Documentation
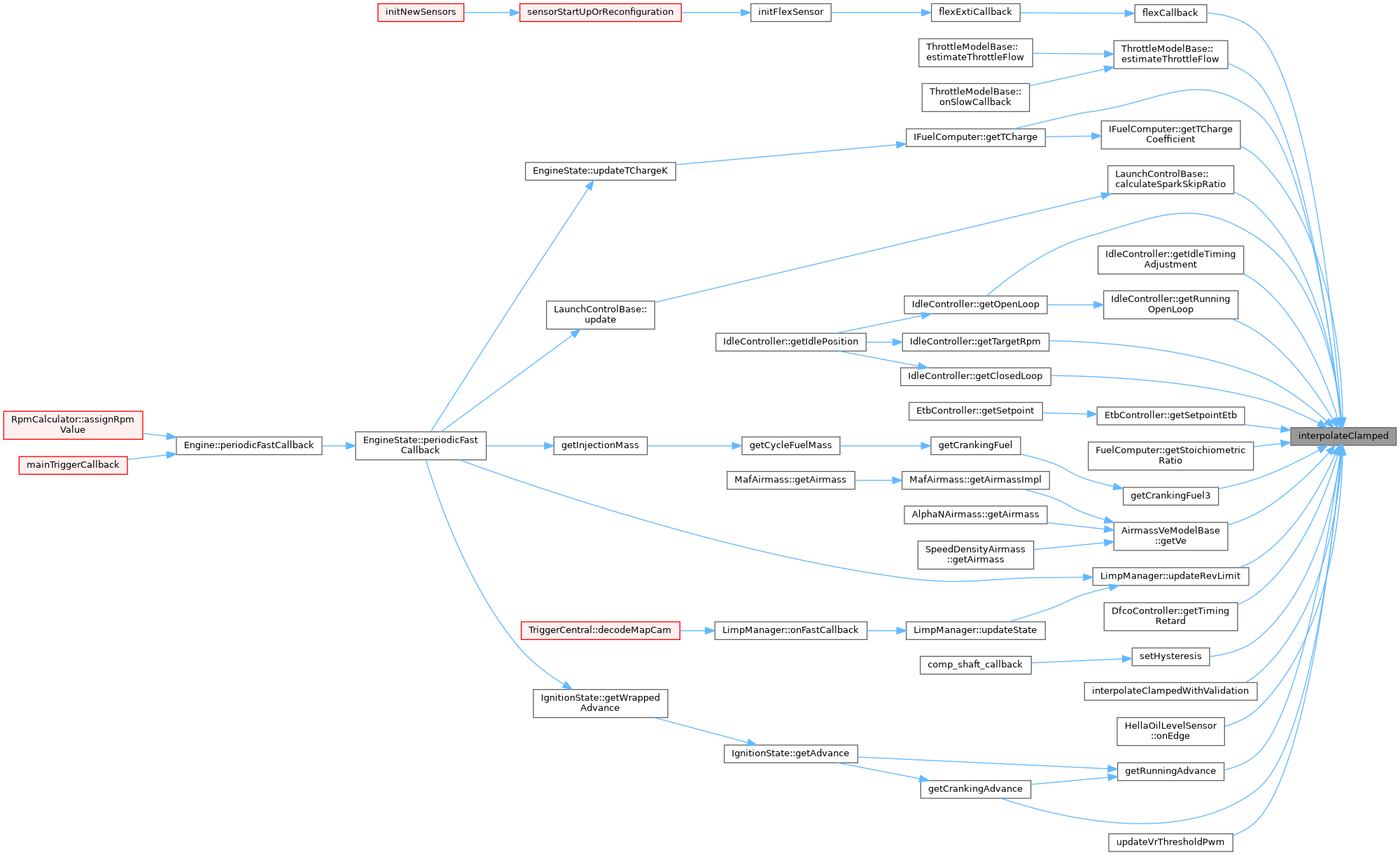
◆ interpolateClamped()
todo: use 'interpolateClampedWithValidation' wider?
- See also
- interpolateMsg
Definition at line 69 of file interpolation.cpp.
Referenced by LaunchControlBase::calculateSparkSkipRatio(), FlexSensor::callback(), ThrottleModelBase::estimateThrottleFlow(), IdleController::getClosedLoop(), getCrankingAdvance(), getCrankingFuel3(), IdleController::getIdleTimingAdjustment(), IdleController::getOpenLoop(), getRunningAdvance(), IdleController::getRunningOpenLoop(), EtbController::getSetpointEtb(), FuelComputer::getStoichiometricRatio(), IdleController::getTargetRpm(), IFuelComputer::getTCharge(), IFuelComputer::getTChargeCoefficient(), DfcoController::getTimingRetard(), AirmassVeModelBase::getVe(), interpolateClampedWithValidation(), HellaOilLevelSensor::onEdge(), setHysteresis(), LimpManager::updateRevLimit(), and updateVrThresholdPwm().
◆ interpolateClampedWithValidation()
Definition at line 58 of file interpolation.cpp.

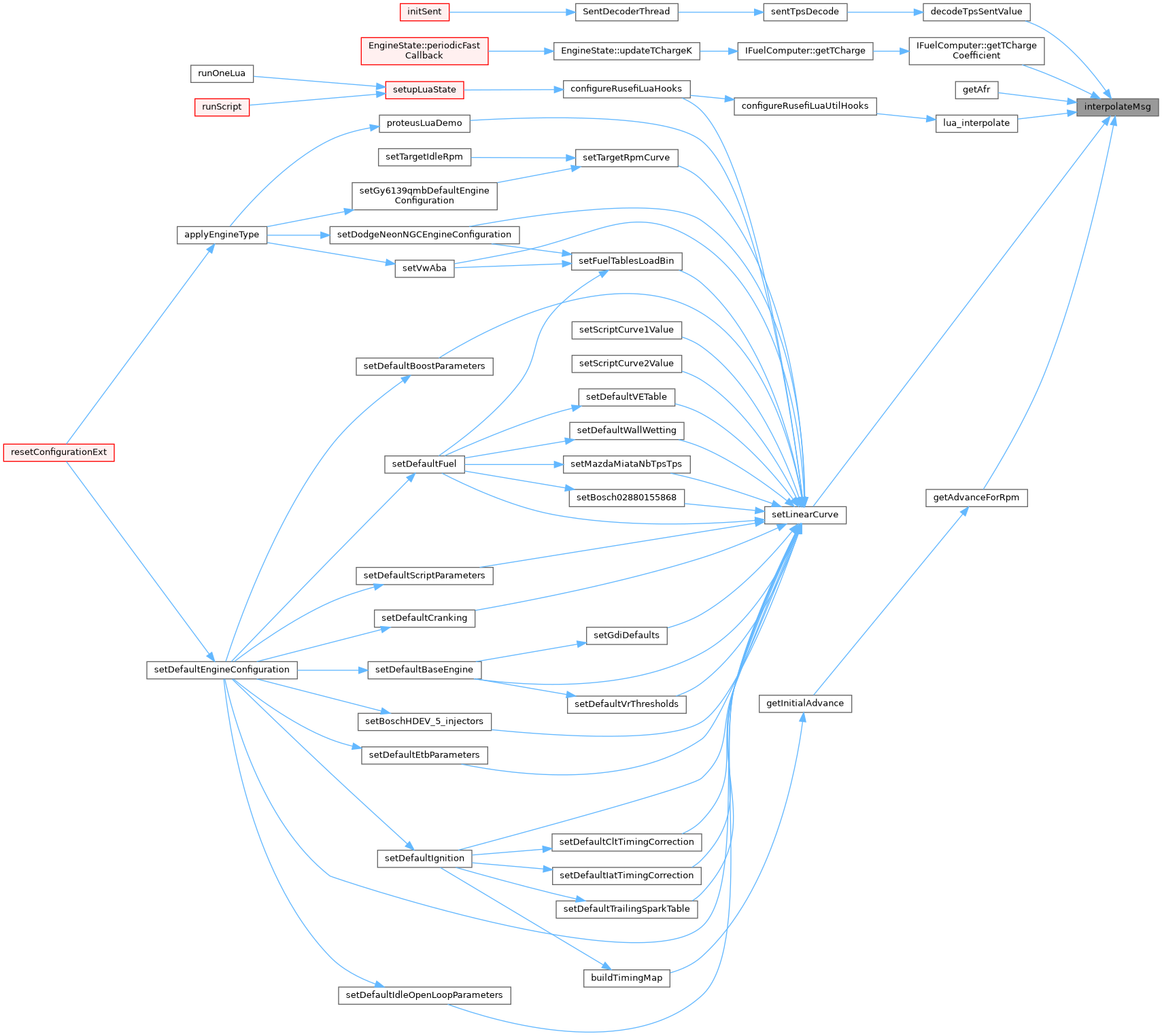
◆ interpolateMsg()
Linear interpolation by two points.
- Parameters
-
x1 key of the first point y1 value of the first point x2 key of the second point y2 value of the second point X key to be interpolated
- Note
- For example, "interpolateMsg("", engineConfiguration.tpsMin, 0, engineConfiguration.tpsMax, 100, adc);"
- See also
- interpolateClamped
we could end up here for example while resetting bins while changing engine type
Definition at line 28 of file interpolation.cpp.
Referenced by decodeTpsSentValue(), getAdvanceForRpm(), getAfr(), IFuelComputer::getTChargeCoefficient(), lua_interpolate(), and setLinearCurve().