Detailed Description
- Date
- Apr 14, 2014
Definition in file microsecond_timer.h.
Functions | |
| void | initMicrosecondTimer () |
| void | setHardwareSchedulerTimer (efitick_t nowNt, efitick_t setTimeNt) |
Function Documentation
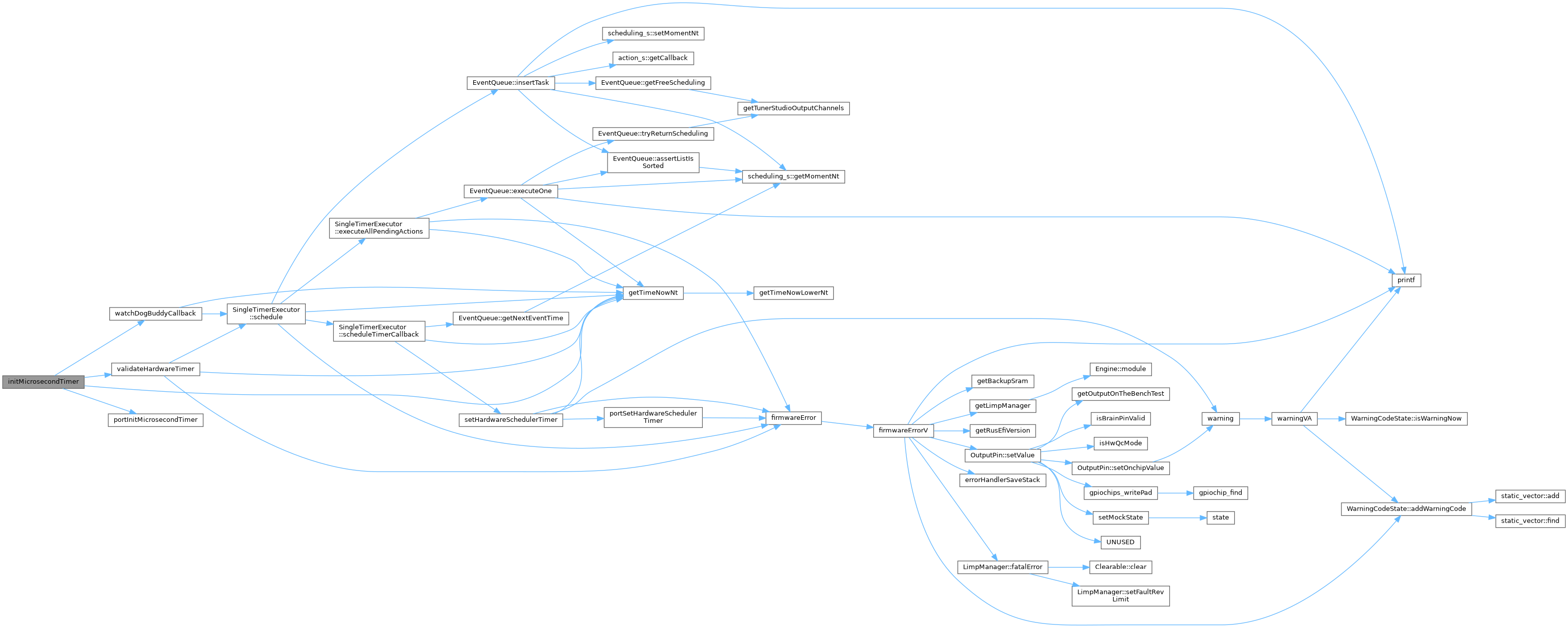
◆ initMicrosecondTimer()
| void initMicrosecondTimer | ( | ) |
Definition at line 172 of file microsecond_timer.cpp.
172 {
173 portInitMicrosecondTimer();
174
176
178
179 validateHardwareTimer();
180
181 watchDogBuddyCallback();
182#if EFI_EMULATE_POSITION_SENSORS
183 watchdogControllerInstance.start();
184#endif /* EFI_EMULATE_POSITION_SENSORS */
185}
static MicrosecondTimerWatchdogController watchdogControllerInstance
Definition microsecond_timer.cpp:124
Referenced by initSingleTimerExecutorHardware().
Here is the call graph for this function:
Here is the caller graph for this function:

◆ setHardwareSchedulerTimer()
| void setHardwareSchedulerTimer | ( | efitick_t | nowNt, |
| efitick_t | setTimeNt | ||
| ) |
sets the alarm to the specified number of microseconds from now. This function should be invoked under kernel lock which would disable interrupts.
#259 BUG error: not positive deltaTimeNt Once in a while we night get an interrupt where we do not expect it
Definition at line 50 of file microsecond_timer.cpp.
50 {
52
53 setHwTimerCounter++;
54
55 // How many ticks in the future is this event?
56 const auto timeDeltaNt = setTimeNt - nowNt;
57
58 /**
59 * #259 BUG error: not positive deltaTimeNt
60 * Once in a while we night get an interrupt where we do not expect it
61 */
62 if (timeDeltaNt <= 0) {
63 timerFreezeCounter++;
65 }
66
67 // We need the timer to fire after we return - too close to now may actually schedule in the past
68 if (timeDeltaNt < US2NT(2)) {
69 setTimeNt = nowNt + US2NT(2);
70 } else if (timeDeltaNt >= TOO_FAR_INTO_FUTURE_NT) {
71 uint32_t delta32;
72 if (timeDeltaNt > UINT32_MAX) {
73 delta32 = UINT32_MAX;
74 } else {
75 delta32 = timeDeltaNt;
76 }
77
78 // we are trying to set callback for too far into the future. This does not look right at all
79 firmwareError(ObdCode::CUSTOM_ERR_TIMER_OVERFLOW, "setHardwareSchedulerTimer() too far: %lu", delta32);
80 return;
81 }
82
83 // Skip scheduling if there's a firmware error active
84 if (hasFirmwareError()) {
85 return;
86 }
87
88 // Do the actual hardware-specific timer set operation
89 portSetHardwareSchedulerTimer(nowNt, setTimeNt);
90
93 timerRestartCounter++;
94}
void portSetHardwareSchedulerTimer(efitick_t nowNt, efitick_t setTimeNt)
Definition microsecond_timer_gpt.cpp:6
@ CUSTOM_ERR_TIMER_OVERFLOW
@ CUSTOM_OBD_LOCAL_FREEZE
Referenced by SingleTimerExecutor::scheduleTimerCallback().
Here is the call graph for this function:

Here is the caller graph for this function:
