#include <electronic_throttle_impl.h>
Public Member Functions | |
| template<typename... TArgs> | |
| EtbImpl (TArgs &&... args) | |
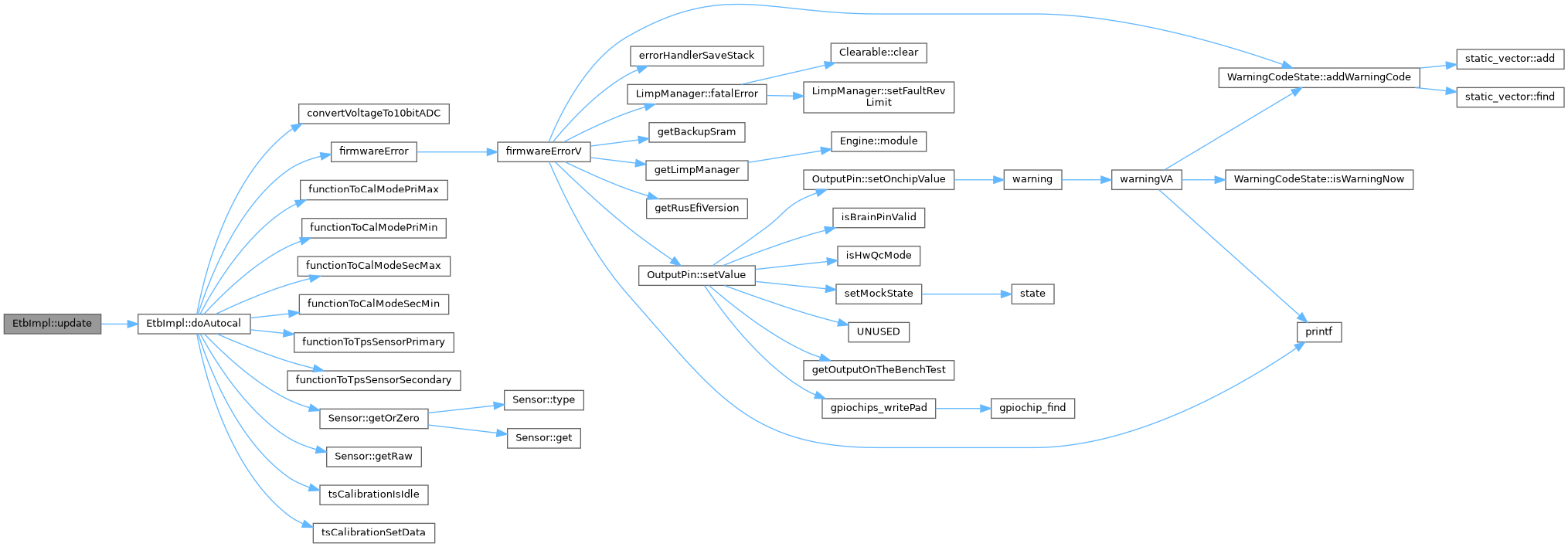
| void | update () override |
| void | startBenchTest () override |
| void | autoCalibrateTps (bool reportToTs) override |
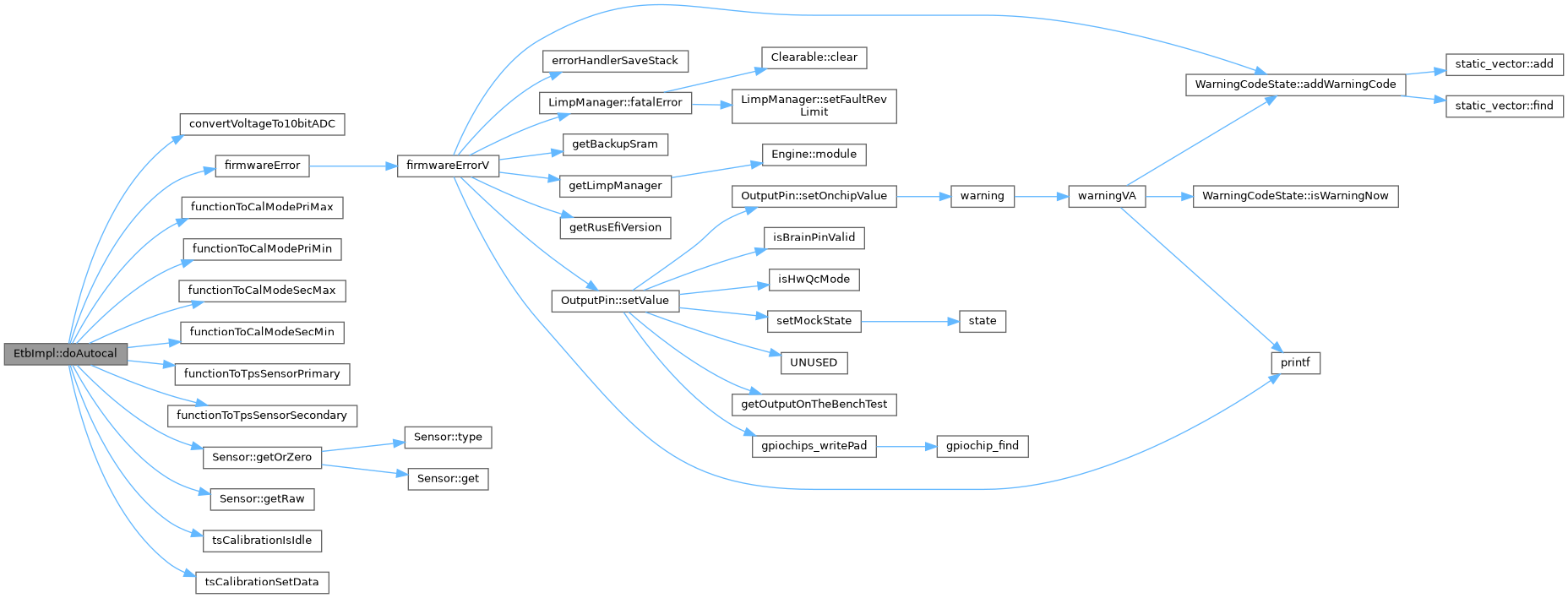
| ACPhase | doAutocal (ACPhase phase) |
Private Types | |
| enum class | ACPhase { Stopped , Start , Open , Close , TransmitPrimaryMax , TransmitPrimaryMin , TransmitSecondaryMax , TransmitSecondaryMin } |
Private Attributes | |
| ACPhase | m_autocalPhase = ACPhase::Stopped |
| Timer | m_autocalTimer |
| bool | m_isAutocalTs |
| bool | m_benchTestActive = false |
| Timer | m_benchTestTimer |
| float | m_primaryMax |
| float | m_secondaryMax |
| float | m_primaryMin |
| float | m_secondaryMin |
Detailed Description
class EtbImpl< TBase >
Definition at line 155 of file electronic_throttle_impl.h.
Member Enumeration Documentation
◆ ACPhase
|
strongprivate |
| Enumerator | |
|---|---|
| Stopped | |
| Start | |
| Open | |
| Close | |
| TransmitPrimaryMax | |
| TransmitPrimaryMin | |
| TransmitSecondaryMax | |
| TransmitSecondaryMin | |
Definition at line 157 of file electronic_throttle_impl.h.
Constructor & Destructor Documentation
◆ EtbImpl()
|
inline |
Definition at line 177 of file electronic_throttle_impl.h.
Member Function Documentation
◆ autoCalibrateTps()
Definition at line 223 of file electronic_throttle_impl.h.
◆ doAutocal()
Definition at line 231 of file electronic_throttle_impl.h.
Referenced by EtbImpl< TBase >::update().

◆ startBenchTest()
Definition at line 206 of file electronic_throttle_impl.h.
◆ update()
Definition at line 179 of file electronic_throttle_impl.h.
Field Documentation
◆ m_autocalPhase
|
private |
Definition at line 341 of file electronic_throttle_impl.h.
Referenced by EtbImpl< TBase >::autoCalibrateTps(), and EtbImpl< TBase >::update().
◆ m_autocalTimer
Definition at line 342 of file electronic_throttle_impl.h.
Referenced by EtbImpl< TBase >::doAutocal(), and EtbImpl< TBase >::update().
◆ m_benchTestActive
Definition at line 346 of file electronic_throttle_impl.h.
Referenced by EtbImpl< TBase >::startBenchTest(), and EtbImpl< TBase >::update().
◆ m_benchTestTimer
Definition at line 347 of file electronic_throttle_impl.h.
Referenced by EtbImpl< TBase >::startBenchTest(), and EtbImpl< TBase >::update().
◆ m_isAutocalTs
Definition at line 344 of file electronic_throttle_impl.h.
Referenced by EtbImpl< TBase >::autoCalibrateTps(), and EtbImpl< TBase >::doAutocal().
◆ m_primaryMax
Definition at line 349 of file electronic_throttle_impl.h.
Referenced by EtbImpl< TBase >::doAutocal().
◆ m_primaryMin
Definition at line 351 of file electronic_throttle_impl.h.
Referenced by EtbImpl< TBase >::doAutocal().
◆ m_secondaryMax
Definition at line 350 of file electronic_throttle_impl.h.
Referenced by EtbImpl< TBase >::doAutocal().
◆ m_secondaryMin
Definition at line 352 of file electronic_throttle_impl.h.
Referenced by EtbImpl< TBase >::doAutocal().
The documentation for this class was generated from the following file:
- controllers/actuators/electronic_throttle_impl.h