#include <isotp.h>
Public Member Functions | |
| IsoTpBase (ICanTransmitter *p_txTransport, size_t p_busIndex, uint32_t p_rxFrameId, uint32_t p_txFrameId) | |
| int | sendFrame (const IsoTpFrameHeader &header, const uint8_t *data, int num, can_sysinterval_t timeout) |
| void | sendFlowControl (can_sysinterval_t timeout) |
| can_msg_t | transmit (CanTxMessage &ctfp, can_sysinterval_t timeout) |
Data Fields | |
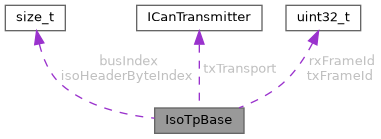
| size_t | isoHeaderByteIndex = 0 |
| ICanTransmitter * | txTransport |
| size_t | busIndex |
| uint32_t | rxFrameId |
| uint32_t | txFrameId |
Detailed Description
Constructor & Destructor Documentation
◆ IsoTpBase()
|
inline |
Member Function Documentation
◆ sendFlowControl()
| void IsoTpBase::sendFlowControl | ( | can_sysinterval_t | timeout | ) |
Definition at line 80 of file isotp.cpp.
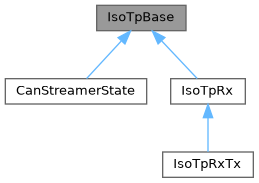
Referenced by IsoTpRx::readTimeout(), and CanStreamerState::receiveFrame().


◆ sendFrame()
| int IsoTpBase::sendFrame | ( | const IsoTpFrameHeader & | header, |
| const uint8_t * | data, | ||
| int | num, | ||
| can_sysinterval_t | timeout | ||
| ) |
Definition at line 14 of file isotp.cpp.
Referenced by CanStreamerState::sendDataTimeout(), sendFlowControl(), and IsoTpRxTx::writeTimeout().


◆ transmit()
|
inline |
Definition at line 101 of file isotp.h.
Referenced by sendFrame().


Field Documentation
◆ busIndex
| size_t IsoTpBase::busIndex |
Definition at line 118 of file isotp.h.
Referenced by IsoTpRx::resetRxVerbose(), and sendFrame().
◆ isoHeaderByteIndex
| size_t IsoTpBase::isoHeaderByteIndex = 0 |
Definition at line 114 of file isotp.h.
Referenced by IsoTpRx::decodeFrame(), IsoTpRx::readTimeout(), CanStreamerState::receiveFrame(), CanStreamerState::sendDataTimeout(), sendFrame(), transmit(), and IsoTpRxTx::writeTimeout().
◆ rxFrameId
| uint32_t IsoTpBase::rxFrameId |
Definition at line 119 of file isotp.h.
Referenced by transmit().
◆ txFrameId
| uint32_t IsoTpBase::txFrameId |
Definition at line 120 of file isotp.h.
Referenced by IsoTpRx::decodeFrame(), and sendFrame().
◆ txTransport
| ICanTransmitter* IsoTpBase::txTransport |
Definition at line 116 of file isotp.h.
Referenced by transmit().
The documentation for this class was generated from the following files: