#include <can_msg_tx.h>
Public Member Functions | |
| CanTxMessage (CanCategory category, uint32_t eid, uint8_t dlc=8, size_t bus=0, bool isExtended=false) | |
| ~CanTxMessage () | |
| uint8_t & | operator[] (size_t) |
| Read & write the raw underlying 8-byte buffer. | |
| void | setShortValue (uint16_t value, size_t offset) |
| Write a 16-bit short value to the buffer. Note: this writes in Intel little endian byte order. | |
| void | setShortValueMsb (uint16_t value, size_t offset) |
| void | setBit (size_t byteIdx, size_t bitIdx) |
| Set a single bit in the transmit buffer. Useful for single-bit flags. | |
| void | setDlc (uint8_t dlc) |
| void | setBus (size_t bus) |
| const CANTxFrame * | getFrame () const |
| void | setArray (const uint8_t *data, size_t len) |
| template<size_t N> | |
| void | setArray (const uint8_t(&data)[N]) |
Static Public Member Functions | |
| static void | setDevice (size_t idx, CANDriver *device) |
Data Fields | |
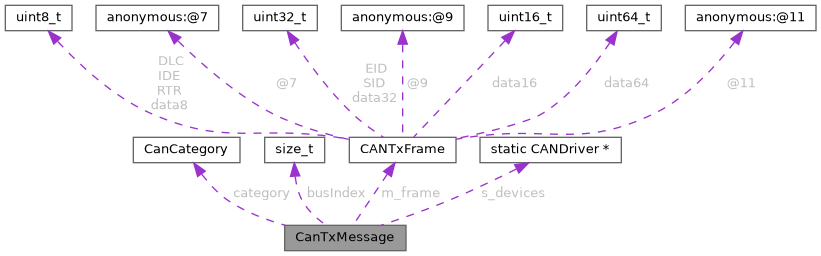
| CanCategory | category |
| size_t | busIndex = 0 |
Protected Attributes | |
| CANTxFrame | m_frame |
Static Private Attributes | |
| static CANDriver * | s_devices [EFI_CAN_BUS_COUNT] |
Detailed Description
Represent a message to be transmitted over CAN.
Usage:
- Create an instance of CanTxMessage
- Set any data you'd like to transmit either using the subscript operator to directly access bytes, or any of the helper functions.
- Upon destruction, the message is transmitted.
Definition at line 31 of file can_msg_tx.h.
Constructor & Destructor Documentation
◆ CanTxMessage()
|
explicit |
Create a new CAN message, with the specified extended ID.
Definition at line 40 of file can_msg_tx.cpp.
◆ ~CanTxMessage()
| CanTxMessage::~CanTxMessage | ( | ) |
Destruction of an instance of CanTxMessage will transmit the message over the wire.
Definition at line 71 of file can_msg_tx.cpp.
Member Function Documentation
◆ getFrame()
|
inline |
Definition at line 81 of file can_msg_tx.h.
◆ operator[]()
| uint8_t & CanTxMessage::operator[] | ( | size_t | index | ) |
Read & write the raw underlying 8-byte buffer.
Definition at line 176 of file can_msg_tx.cpp.
◆ setArray() [1/2]
|
inline |
Definition at line 85 of file can_msg_tx.h.
Referenced by setArray().

◆ setArray() [2/2]
|
inline |
Definition at line 92 of file can_msg_tx.h.

◆ setBit()
Set a single bit in the transmit buffer. Useful for single-bit flags.
Definition at line 172 of file can_msg_tx.cpp.
Referenced by canDashboardHaltech(), and canMazdaRX8().

◆ setBus()
| void CanTxMessage::setBus | ( | size_t | bus | ) |
Definition at line 151 of file can_msg_tx.cpp.
Referenced by CanTxMessage().

◆ setDevice()
|
static |
Configures the device for all messages to transmit from.
Definition at line 31 of file can_msg_tx.cpp.
Referenced by initCan().

◆ setDlc()
| void CanTxMessage::setDlc | ( | uint8_t | dlc | ) |
Definition at line 141 of file can_msg_tx.cpp.
Referenced by CanTxMessage(), and lua_txCan().

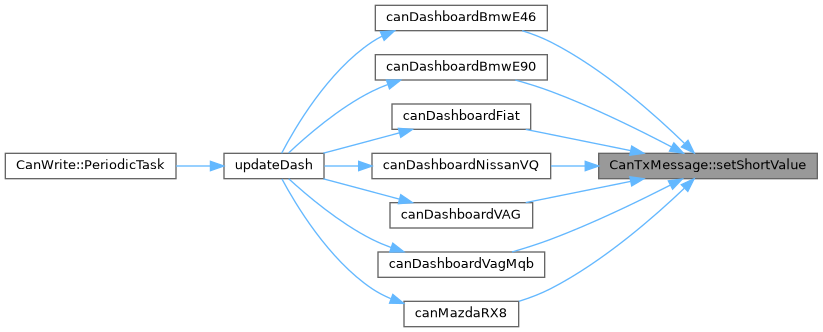
◆ setShortValue()
| void CanTxMessage::setShortValue | ( | uint16_t | value, |
| size_t | offset | ||
| ) |
Write a 16-bit short value to the buffer. Note: this writes in Intel little endian byte order.
Definition at line 161 of file can_msg_tx.cpp.
Referenced by canDashboardBmwE46(), canDashboardBmwE90(), canDashboardFiat(), canDashboardNissanVQ(), canDashboardVAG(), canDashboardVagMqb(), and canMazdaRX8().
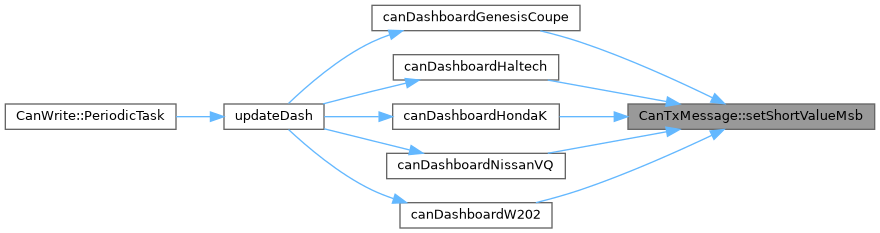
◆ setShortValueMsb()
| void CanTxMessage::setShortValueMsb | ( | uint16_t | value, |
| size_t | offset | ||
| ) |
Same as above but big endian Motorola for instance DBC 8|16@0
Definition at line 167 of file can_msg_tx.cpp.
Referenced by canDashboardGenesisCoupe(), canDashboardHaltech(), canDashboardHondaK(), canDashboardNissanVQ(), and canDashboardW202().
Field Documentation
◆ busIndex
| size_t CanTxMessage::busIndex = 0 |
Definition at line 53 of file can_msg_tx.h.
Referenced by obdSendPacket(), setBus(), and ~CanTxMessage().
◆ category
| CanCategory CanTxMessage::category |
Definition at line 44 of file can_msg_tx.h.
Referenced by CanTxMessage(), and ~CanTxMessage().
◆ m_frame
|
protected |
Definition at line 100 of file can_msg_tx.h.
Referenced by CanTxMessage(), CanTxTyped< TData >::get(), getFrame(), CanTxTyped< TData >::operator->(), operator[](), setArray(), setBit(), setDlc(), setShortValue(), setShortValueMsb(), and ~CanTxMessage().
◆ s_devices
|
staticprivate |
Definition at line 23 of file can_msg_tx.h.
Referenced by setDevice(), and ~CanTxMessage().
The documentation for this class was generated from the following files:
- hw_layer/drivers/can/can_msg_tx.h
- hw_layer/drivers/can/can_msg_tx.cpp