#include <engine.h>
Public Member Functions | |
| Engine () | |
| template<typename get_t > | |
| constexpr auto & | module () |
| template<typename get_t > | |
| constexpr auto const & | module () const |
| void | resetLua () |
| void | OnTriggerStateProperState (efitick_t nowNt, size_t triggerStateIndex) override |
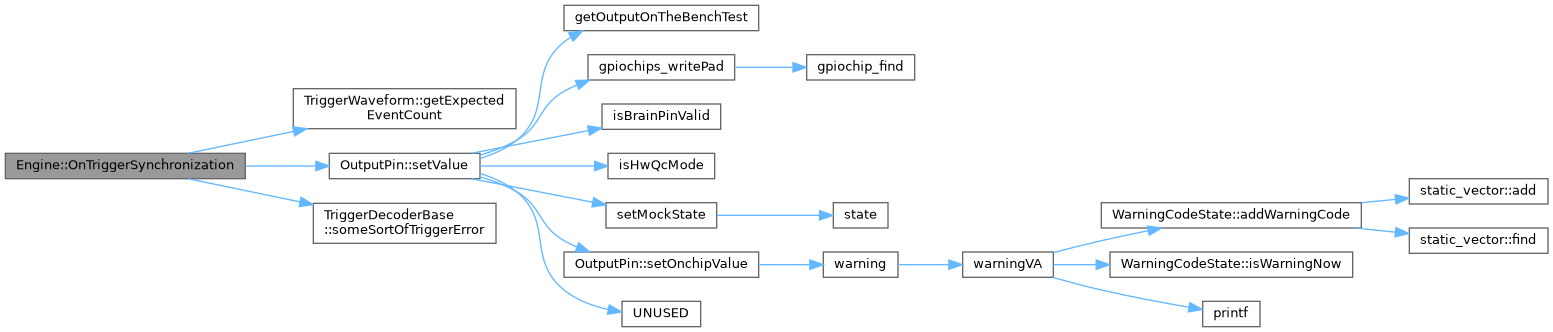
| void | OnTriggerSynchronization (bool wasSynchronized, bool isDecodingError) override |
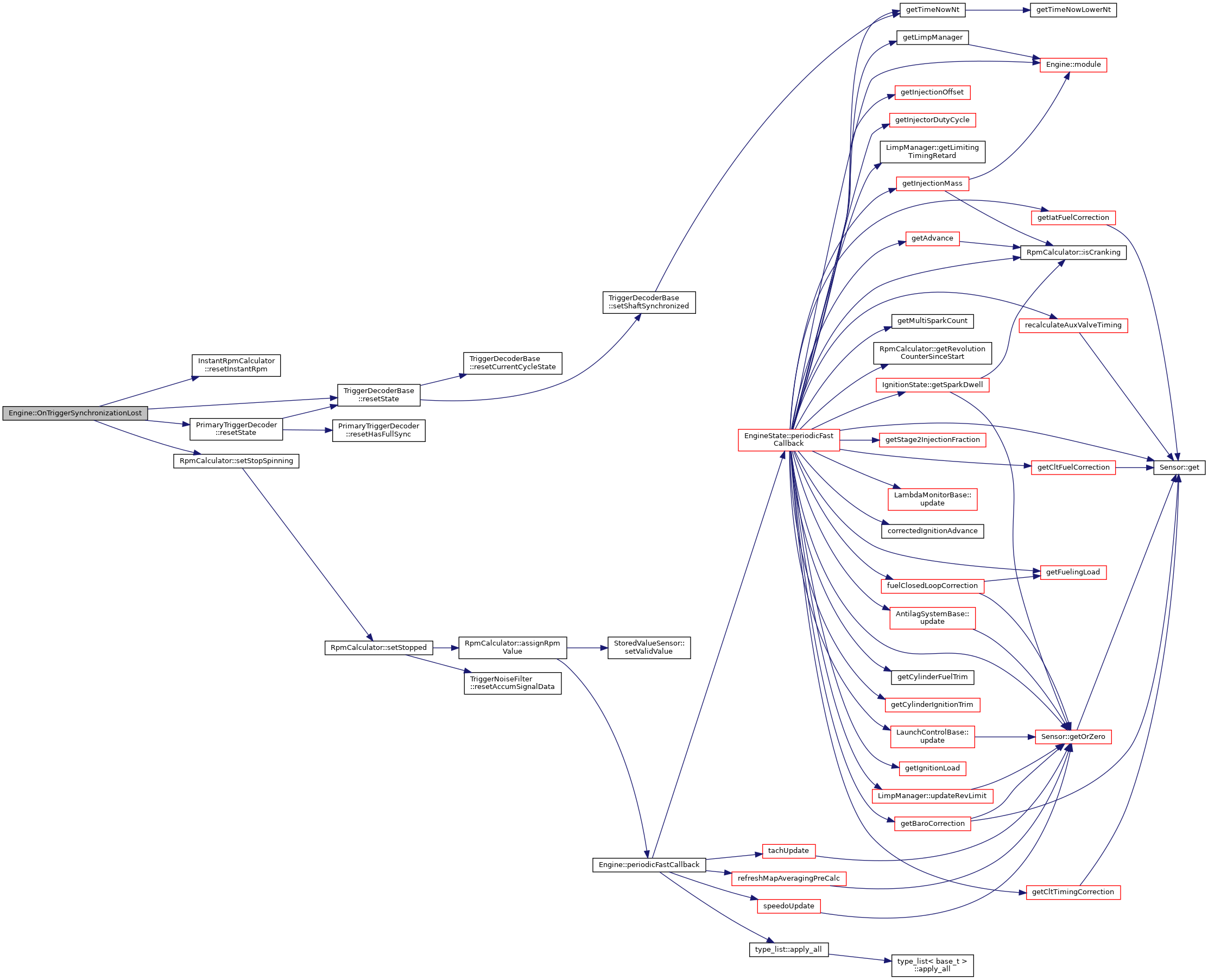
| void | OnTriggerSynchronizationLost () override |
| TriggerStateListener * | nextListener () override |
| void | setConfig () |
| int | getBailedOnDwellCount () const |
| void | incrementBailedOnDwellCount () |
| int | getGlobalConfigurationVersion () const |
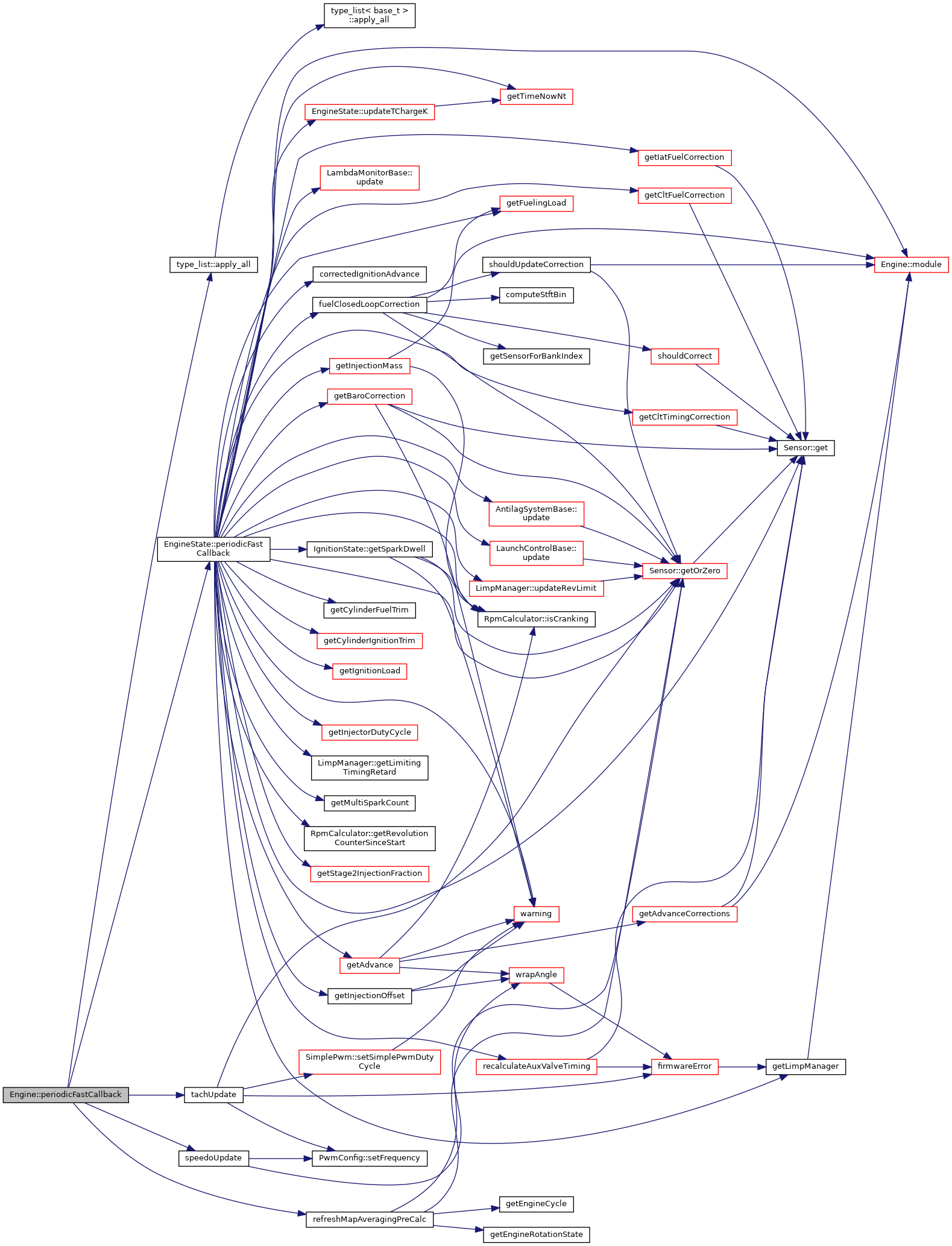
| void | periodicFastCallback () |
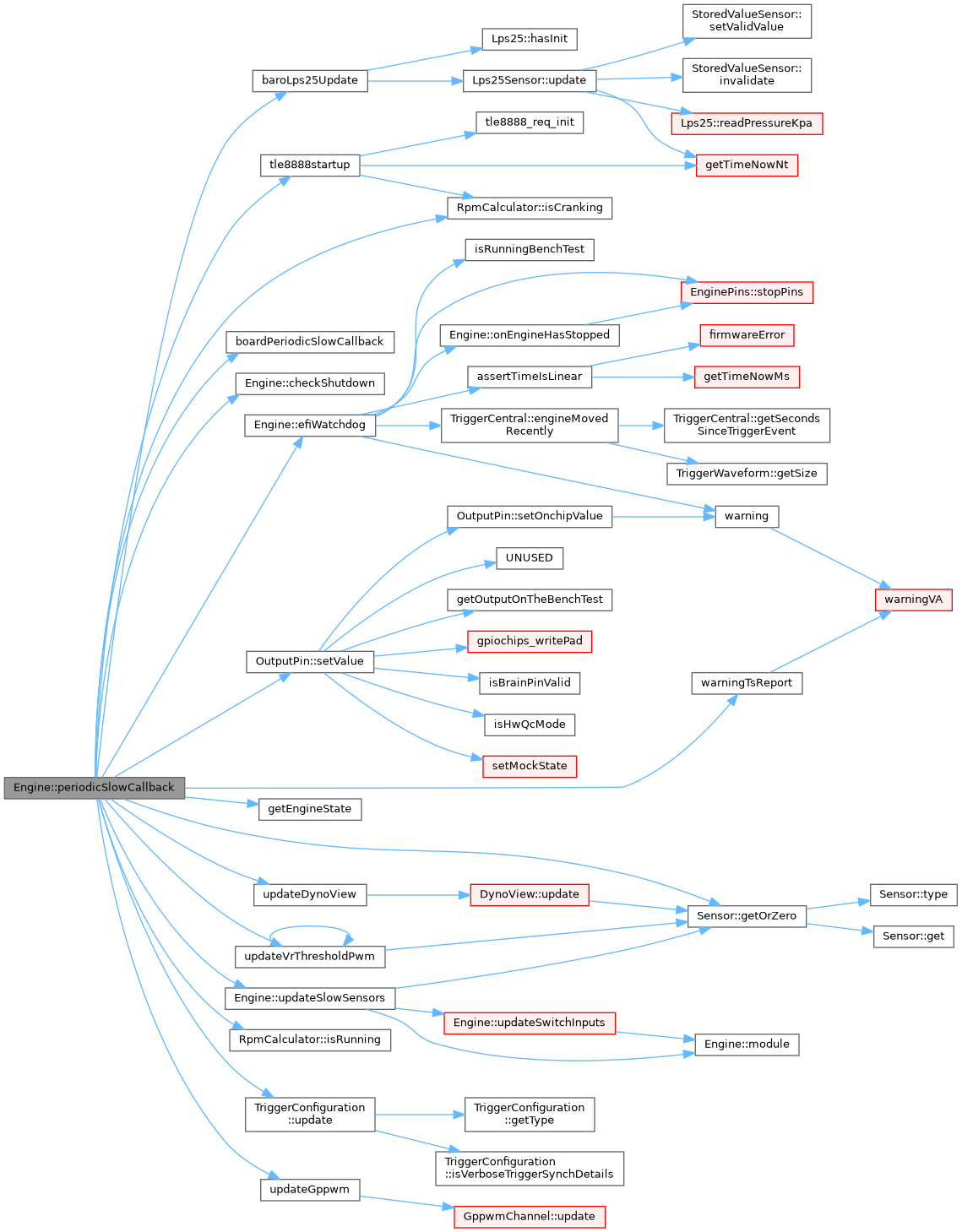
| void | periodicSlowCallback () |
| void | onEngineStopped () |
| void | updateSlowSensors () |
| void | updateSwitchInputs () |
| void | updateTriggerConfiguration () |
| void | resetEngineSnifferIfInTestMode () |
| void | preCalculate () |
| void | efiWatchdog () |
| void | onEngineHasStopped () |
| void | checkShutdown () |
| bool | isInShutdownMode () const |
| void | onSparkFireKnockSense (uint8_t cylinderIndex, efitick_t nowNt) |
Private Member Functions | |
| void | reset () |
| void | injectEngineReferences () |
Private Attributes | |
| int | bailedOnDwellCount = 0 |
Detailed Description
Constructor & Destructor Documentation
◆ Engine()
| Engine::Engine | ( | ) |

Member Function Documentation
◆ checkShutdown()
| void Engine::checkShutdown | ( | ) |
Needed by EFI_MAIN_RELAY_CONTROL to shut down the engine correctly. This method cancels shutdown if the ignition voltage is detected.
Definition at line 478 of file engine.cpp.
Referenced by periodicSlowCallback().

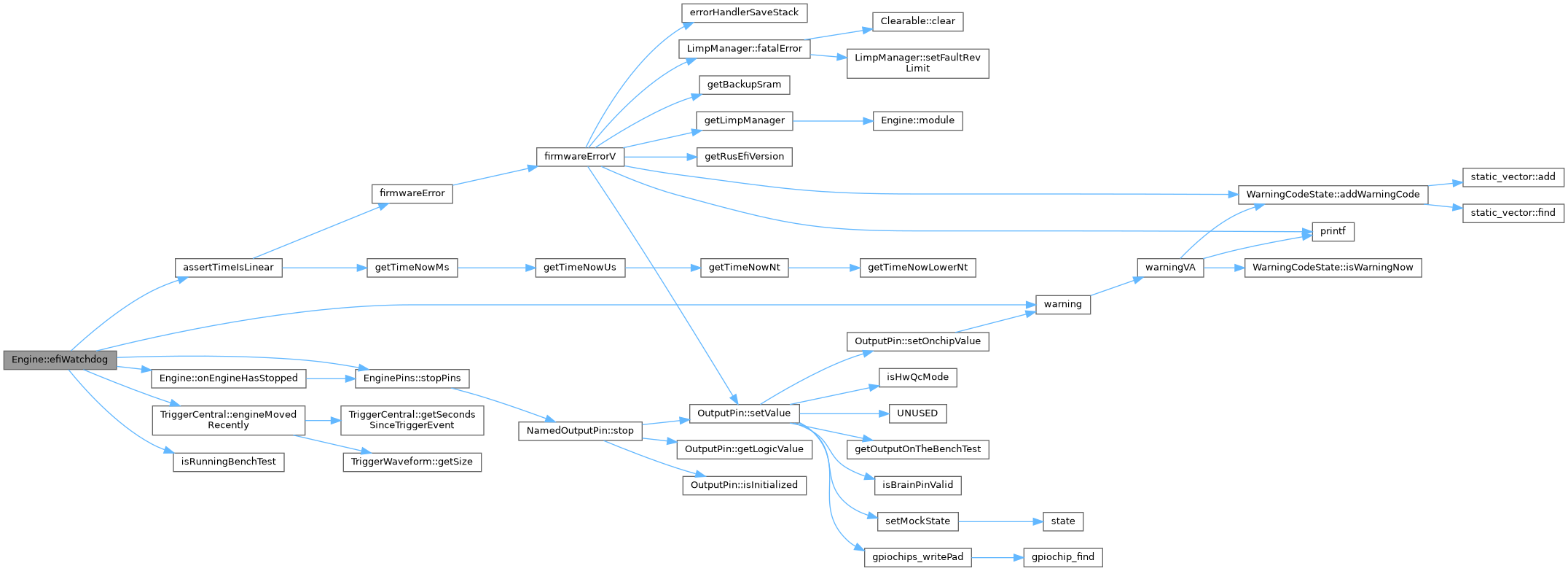
◆ efiWatchdog()
| void Engine::efiWatchdog | ( | ) |
todo: better watch dog implementation should be implemented - see http://sourceforge.net/p/rusefi/tickets/96/
Definition at line 436 of file engine.cpp.
Referenced by periodicSlowCallback().

◆ getBailedOnDwellCount()
◆ getGlobalConfigurationVersion()
| int Engine::getGlobalConfigurationVersion | ( | ) | const |
Definition at line 297 of file engine.cpp.
Referenced by TriggerCentral::checkIfTriggerConfigChanged(), configureRusefiLuaHooks(), printConfiguration(), and updateTriggerWaveformIfNeeded().

◆ incrementBailedOnDwellCount()
|
inline |
Definition at line 270 of file engine.h.
Referenced by turnSparkPinHighStartCharging().

◆ injectEngineReferences()
|
private |
Definition at line 397 of file engine.cpp.
Referenced by setConfig().


◆ isInShutdownMode()
| bool Engine::isInShutdownMode | ( | ) | const |
Allows to finish some long-term shutdown procedures (stepper motor parking etc.) Called when the ignition switch is turned off (vBatt is too low). Returns true if some operations are in progress on background.
Definition at line 512 of file engine.cpp.

◆ module() [1/2]
|
inlineconstexpr |
Slightly shorter helper function to keep the code looking clean.
Definition at line 204 of file engine.h.
Referenced by WallFuel::adjust(), applyPidSettings(), auxPlainPinTurnOn(), canDashboardHaltech(), EtbController::checkJam(), EtbController::checkStatus(), commonInitEngineController(), configureRusefiLuaHooks(), getAdvanceCorrections(), IdleController::getClosedLoop(), getIdlePosition(), IdleController::getIdlePosition(), getInjectionMass(), ShortTermFuelTrim::getLearningState(), getLimpManager(), getLiveData(), getLiveData(), AlternatorController::getOpenLoop(), IdleController::getOpenLoop(), getOutputValueByHash(), SpeedDensityAirmass::getPredictiveMap(), PrimeController::getPrimeDuration(), getRunningAdvance(), getRunningFuel(), IdleController::getRunningOpenLoop(), IdleController::getTargetRpm(), AirmassVeModelBase::getVe(), handleGetDataRequest(), TriggerCentral::handleShaftSignal(), initAccelEnrichment(), initBoostCtrl(), initSoftwareKnock(), initStft(), initVvtActuators(), LambdaMonitorBase::isCurrentlyGood(), LtftState::load(), lua_getDigital(), mainTriggerCallback(), FanController::onSlowCallback(), InjectionEvent::onTriggerTooth(), overFireSparkAndPrepareNextSchedule(), EngineState::periodicFastCallback(), populateFrame(), populateFrame(), populateFrame(), populateFrame(), populateFrame(), populateFrame(), processLastKnockEvent(), resetAccel(), resetLua(), HpfpController::scheduleNextCycle(), scheduleOpen(), scheduleSparkEvent(), startIdleThread(), storageReadID(), storageWriteID(), updateFlags(), updateFuelResults(), updateSlowSensors(), updateSwitchInputs(), and updateVehicleSpeed().
◆ module() [2/2]
|
inlineconstexpr |
◆ nextListener()
|
overridevirtual |
◆ onEngineHasStopped()
| void Engine::onEngineHasStopped | ( | ) |
Definition at line 465 of file engine.cpp.
Referenced by efiWatchdog().


◆ onEngineStopped()
| void Engine::onEngineStopped | ( | ) |
Definition at line 571 of file engine.cpp.
Referenced by RpmCalculator::setStopSpinning().

◆ onSparkFireKnockSense()
| void Engine::onSparkFireKnockSense | ( | uint8_t | cylinderIndex, |
| efitick_t | nowNt | ||
| ) |
Definition at line 190 of file knock_controller.cpp.
Referenced by fireSparkAndPrepareNextSchedule().


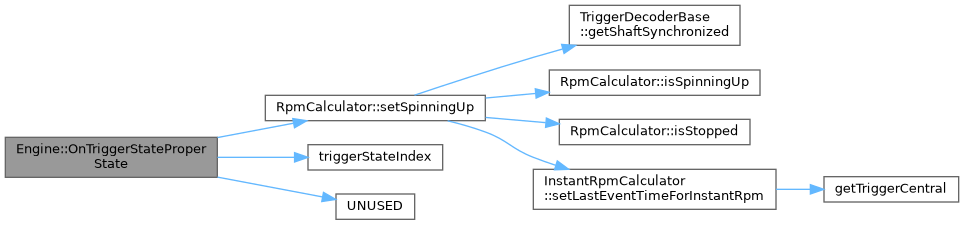
◆ OnTriggerStateProperState()
|
overridevirtual |
Implements TriggerStateListener.
Definition at line 344 of file engine.cpp.
◆ OnTriggerSynchronization()
|
overridevirtual |
Implements TriggerStateListener.
Definition at line 368 of file engine.cpp.
◆ OnTriggerSynchronizationLost()
|
overridevirtual |
Implements TriggerStateListener.
Definition at line 354 of file engine.cpp.
◆ periodicFastCallback()
| void Engine::periodicFastCallback | ( | ) |
See FAST_CALLBACK_PERIOD_MS
The idea of this method is to execute all heavy calculations in a lower-priority thread, so that trigger event handler/IO scheduler tasks are faster.
Definition at line 557 of file engine.cpp.
Referenced by RpmCalculator::assignRpmValue(), and mainTriggerCallback().

◆ periodicSlowCallback()
| void Engine::periodicSlowCallback | ( | ) |
See SLOW_CALLBACK_PERIOD_MS
Definition at line 159 of file engine.cpp.
Referenced by doPeriodicSlowCallback().

◆ preCalculate()
| void Engine::preCalculate | ( | ) |
Here we have a bunch of stuff which should invoked after configuration change so that we can prepare some helper structures
Definition at line 333 of file engine.cpp.
Referenced by incrementGlobalConfigurationVersion(), and readFromFlash().

◆ reset()
|
private |
it's important for wrapAngle() that engineCycle field never has zero
Definition at line 301 of file engine.cpp.
◆ resetEngineSnifferIfInTestMode()
| void Engine::resetEngineSnifferIfInTestMode | ( | ) |
Definition at line 53 of file engine.cpp.
Referenced by setEngineType(), setTriggerEmulatorRPM(), setTriggerType(), setValue(), and setWholeTimingMapCmd().


◆ resetLua()
| void Engine::resetLua | ( | ) |
Definition at line 309 of file engine.cpp.
Referenced by Engine(), and reset().

◆ setConfig()
| void Engine::setConfig | ( | ) |
Definition at line 406 of file engine.cpp.
Referenced by runRusEfi().


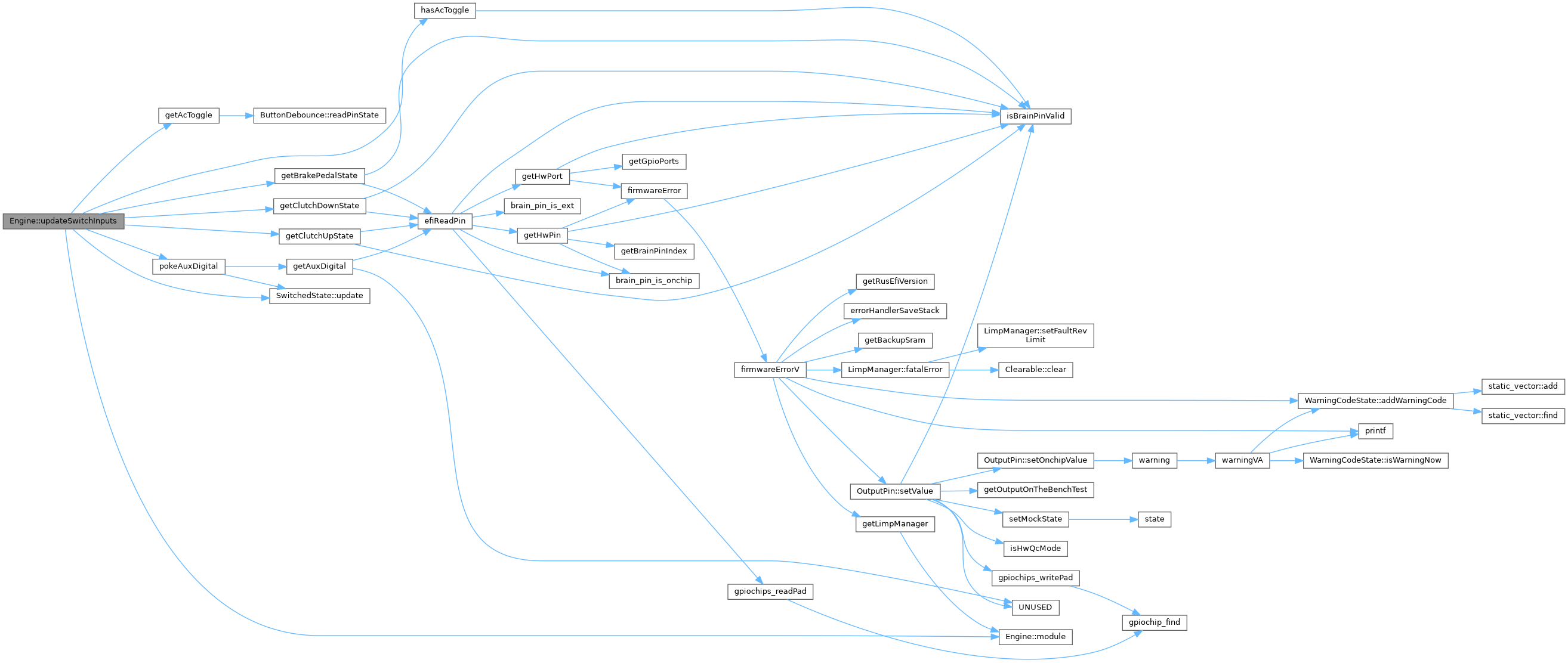
◆ updateSlowSensors()
| void Engine::updateSlowSensors | ( | ) |
We are executing these heavy (logarithm) methods from outside the trigger callbacks for performance reasons. See also periodicFastCallback
Definition at line 218 of file engine.cpp.
Referenced by periodicSlowCallback(), and testRusefiMethods().
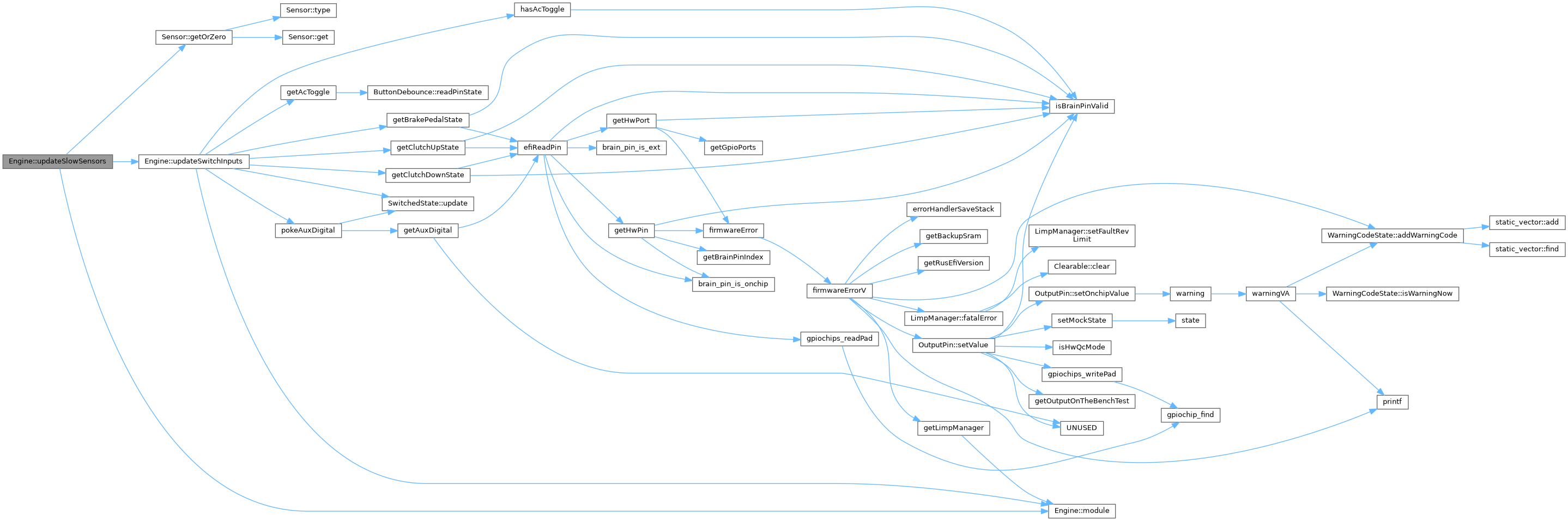

◆ updateSwitchInputs()
| void Engine::updateSwitchInputs | ( | ) |
Definition at line 264 of file engine.cpp.
Referenced by updateSlowSensors().

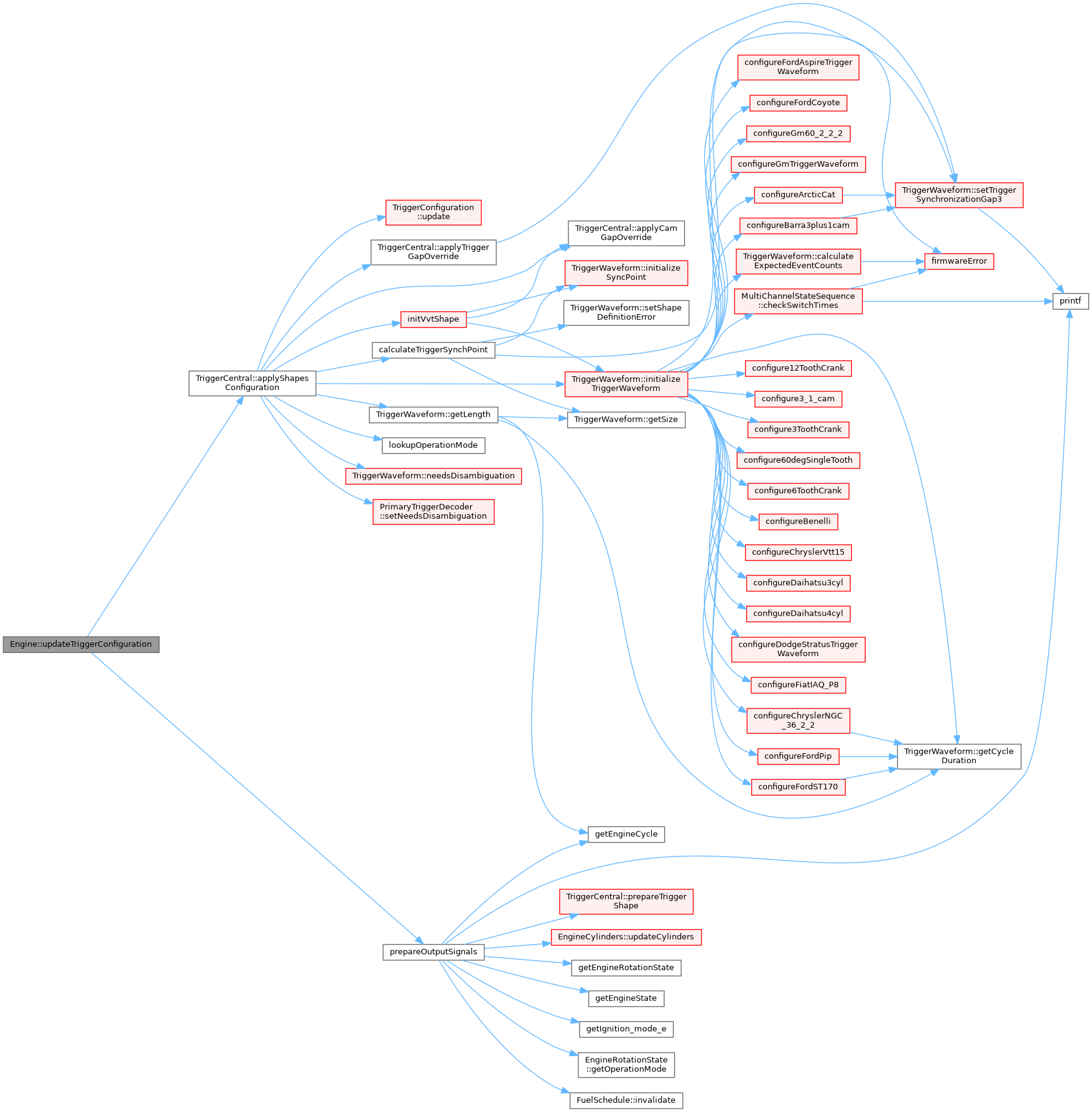
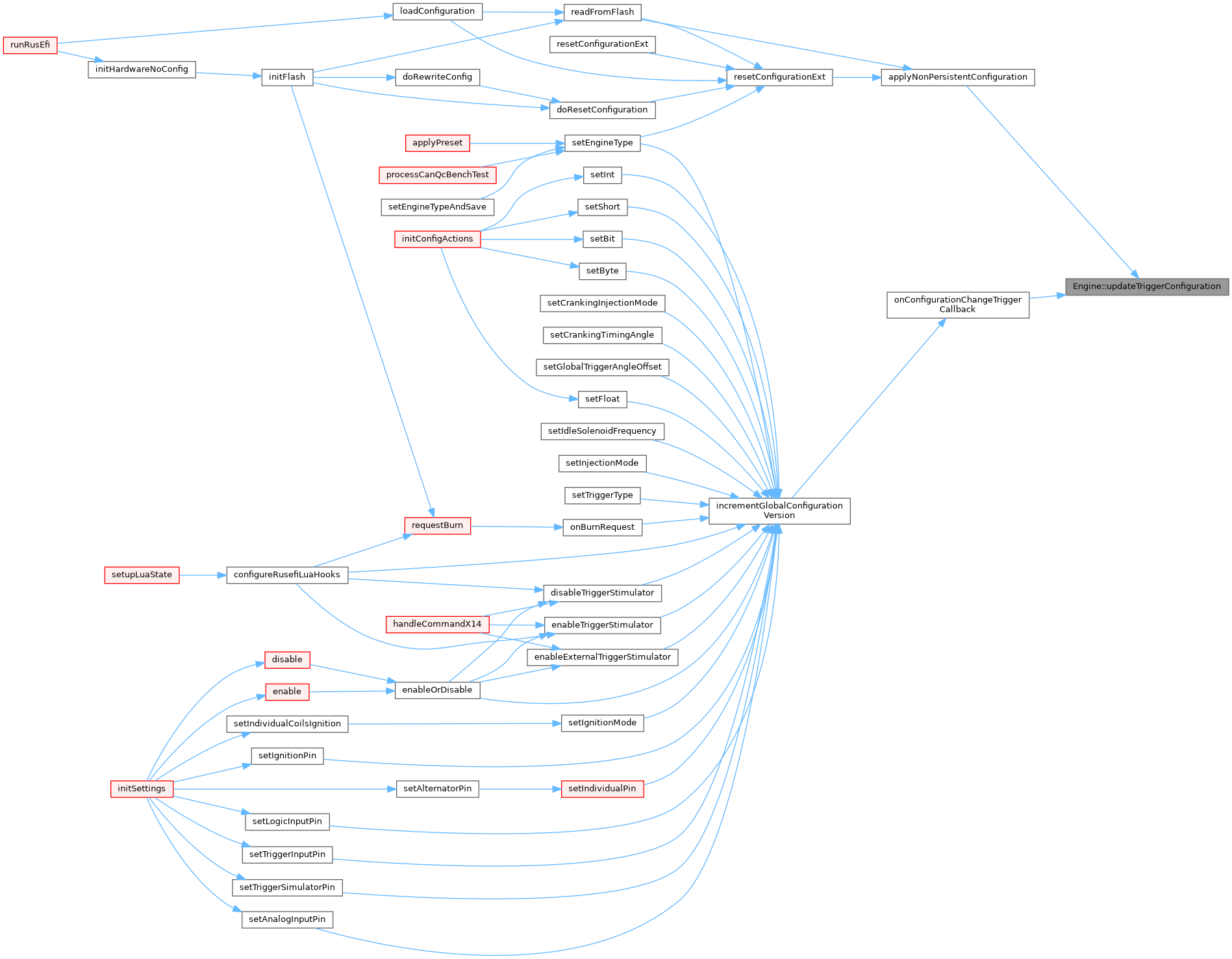
◆ updateTriggerConfiguration()
| void Engine::updateTriggerConfiguration | ( | ) |
Definition at line 133 of file engine.cpp.
Referenced by applyNonPersistentConfiguration(), and onConfigurationChangeTriggerCallback().
Field Documentation
◆ acButtonSwitchedState
| SwitchedState Engine::acButtonSwitchedState {&engineModules.get<AcController>().unmock().acButtonState} |
Definition at line 220 of file engine.h.
Referenced by sendQcBenchButtonCounters(), and updateSwitchInputs().
◆ allowCanTx
| bool Engine::allowCanTx = true |
Sometimes for instance during shutdown we need to completely supress CAN TX
Definition at line 118 of file engine.h.
Referenced by configureRusefiLuaHooks(), and CanTxMessage::~CanTxMessage().
◆ antilagController
| AntilagSystemBase Engine::antilagController {} |
Definition at line 232 of file engine.h.
Referenced by configureRusefiLuaHooks(), getFuelALSCorrection(), getLiveData(), getRunningAdvance(), getRunningFuel(), IdleController::getRunningOpenLoop(), EtbController::getSetpointEtb(), and EngineState::periodicFastCallback().
◆ auxValves
| AuxActor Engine::auxValves[AUX_DIGITAL_VALVE_COUNT][2] {} |
◆ bailedOnDwellCount
|
private |
Definition at line 267 of file engine.h.
Referenced by getBailedOnDwellCount(), and incrementBailedOnDwellCount().
◆ brakePedalSwitchedState
| SwitchedState Engine::brakePedalSwitchedState {&engineState.brakePedalState} |
Definition at line 219 of file engine.h.
Referenced by sendQcBenchButtonCounters(), slowStartStopButtonCallback(), and updateSwitchInputs().
◆ clutchUpSwitchedState
| SwitchedState Engine::clutchUpSwitchedState {&engineState.clutchUpState} |
Definition at line 218 of file engine.h.
Referenced by sendQcBenchButtonCounters(), slowStartStopButtonCallback(), and updateSwitchInputs().
◆ configBurnTimer
| Timer Engine::configBurnTimer {} |
Definition at line 316 of file engine.h.
Referenced by assertTimeIsLinear(), and writeToFlashNowImpl().
◆ cylinders
| OneCylinder Engine::cylinders[MAX_CYLINDER_COUNT] {} |
Definition at line 299 of file engine.h.
Referenced by MapAveragingModule::onFastCallback(), and EngineCylinders::updateCylinders().
◆ dc_motors
| dc_motors_s Engine::dc_motors {} |
Definition at line 354 of file engine.h.
Referenced by getLiveData(), getOutputValueByHash(), and updateTunerStudioState().
◆ dynoInstance
| DynoView Engine::dynoInstance {} |
Definition at line 135 of file engine.h.
Referenced by getDynoviewHP(), getDynoviewTorque(), and updateDynoView().
◆ engineModules
| type_list< Mockable<InjectorModelPrimary>, Mockable<InjectorModelSecondary>,#if EFI_IDLE_CONTROL Mockable<IdleController>,#endif TriggerScheduler,#if EFI_HPFP && EFI_ENGINE_CONTROL Mockable<HpfpController>,#endif #if EFI_ENGINE_CONTROL Mockable<ThrottleModel>,#endif #if EFI_ALTERNATOR_CONTROL AlternatorController,#endif MainRelayController, Mockable<IgnitionController>, Mockable<AcController>, PrimeController, DfcoController,#if EFI_HD_ACR HarleyAcr,#endif Mockable<WallFuelController>, KnockController, SensorChecker,#if EFI_ENGINE_CONTROL Mockable<LimpManager>,#endif #if EFI_VVT_PID VvtController1, VvtController2, VvtController3, VvtController4,#endif #if EFI_BOOST_CONTROL BoostController,#endif TpsAccelEnrichment,#if EFI_LAUNCH_CONTROL NitrousController,#endif #if EFI_LTFT_CONTROL LongTermFuelTrim,#endif ShortTermFuelTrim,#include "modules_list_generated.h" EngineModule > Engine::engineModules {} |
Definition at line 198 of file engine.h.
Referenced by incrementGlobalConfigurationVersion(), mainTriggerCallback(), module(), module(), onEngineStopped(), MainRelayController::onSlowCallback(), IgnitionController::onSlowCallback(), periodicFastCallback(), periodicSlowCallback(), runRusEfi(), setDefaultBaseEngine(), and LongTermIdleTrim::update().
◆ engineState
| EngineState Engine::engineState {} |
Definition at line 352 of file engine.h.
Referenced by alphax_2chan_ConfigOverrides(), auxPlainPinTurnOn(), HpfpQuantity::calcFuelPercent(), canDashboardHaltech(), EtbController::checkStatus(), configureRusefiLuaHooks(), detectHellenBoardType(), fireSparkAndPrepareNextSchedule(), firmwareErrorV(), getAcrState(), getAdvanceCorrections(), SpeedDensityAirmass::getAirmass(), AngleBasedEvent::getAngleFromNow(), getBaseFuelMass(), getBoardId(), getBrakePedalState(), getClutchDownState(), getClutchUpState(), getCrankingFuel3(), getEngineState(), getInjectionMass(), getInjectorDutyCycle(), getInjectorDutyCycleStage2(), getLiveData(), getMultiSparkCount(), getOutputValueByHash(), getPerCylinderFiringOrderOffset(), getRunningAdvance(), getRunningFuel(), DfcoController::getState(), AirmassVeModelBase::getVe(), handleGetConfigErorr(), handleGetDataRequest(), handleTestCommand(), hellen154_hyundai_boardConfigOverrides(), hellen_MiataNB2_boardConfigOverrides(), initDataStructures(), initializeIgnitionActions(), is_F_OrOlder(), AemXSeriesWideband::isHeaterAllowed(), isMegaModuleRevision(), lua_getDigital(), obdOnCanPacketRx(), MapAveragingModule::onEnginePhase(), MapAveragingModule::onFastCallback(), KnockControllerBase::onKnockSenseCompleted(), HarleyAcr::onSlowCallback(), onTriggerEventSparkLogic(), overFireSparkAndPrepareNextSchedule(), periodicFastCallback(), EngineState::periodicFastCallback(), populateFrame(), populateFrame(), populateFrame(), populateFrame(), populateFrame(), populateFrame(), populateFrame(), prepareCylinderIgnitionSchedule(), recalculateAuxValveTiming(), WarningCodeState::refreshTs(), reset(), resetLua(), runOneLua(), sayHello(), scheduleOpen(), scheduleSparkEvent(), sendWidebandInfo(), Generic4TransmissionController::setPcState(), RotationalIdle::shouldSkipSparkRotationalIdle(), slowStartStopButtonCallback(), startAveraging(), startDwellByTurningSparkPinHigh(), startStopButtonToggle(), testRusefiMethods(), THD_FUNCTION(), OneCylinder::updateCylinderNumber(), updateFuelCorrections(), updateFuelInfo(), LimpManager::updateState(), updateSwitchInputs(), ShiftTorqueReductionController::updateTriggerPinState(), updateTunerStudioState(), and warningVA().
◆ engineTypeChangeTimer
| Timer Engine::engineTypeChangeTimer {} |
Definition at line 317 of file engine.h.
Referenced by needToTriggerTsRefresh(), and onApplyPreset().
◆ etbAutoTune
| bool Engine::etbAutoTune = false |
Definition at line 304 of file engine.h.
Referenced by blinkEtbErrorCodes(), EtbController::checkStatus(), handleCommandX14(), and initElectronicThrottle().
◆ etbControllers
| IEtbController* Engine::etbControllers[ETB_COUNT] = {nullptr} |
Definition at line 130 of file engine.h.
Referenced by configureRusefiLuaHooks(), doInitElectronicThrottle(), etbPidReset(), initElectronicThrottle(), setEtbIdlePosition(), and setEtbWastegatePosition().
◆ etbIgnoreJamProtection
| bool Engine::etbIgnoreJamProtection = false |
Definition at line 305 of file engine.h.
Referenced by LimpManager::allowElectronicThrottle(), and handleCommandX14().
◆ fuelComputer
| FuelComputer Engine::fuelComputer {} |
Definition at line 143 of file engine.h.
Referenced by IdleController::determinePhase(), f407_discovery_boardInitHardware(), getBaseFuelMass(), ShortTermFuelTrim::getCorrectionState(), IdleController::getIdleTimingAdjustment(), ClosedLoopFuelCellImpl::getLambdaError(), getLiveData(), LambdaMonitor::getMaxAllowedLambda(), getOutputValueByHash(), getRunningFuel(), SensorChecker::onSlowCallback(), EngineState::periodicFastCallback(), populateFrame(), populateFrame(), populateFrame(), updateLambda(), and EngineState::updateTChargeK().
◆ gearController
| GearControllerBase* Engine::gearController = nullptr |
Definition at line 214 of file engine.h.
Referenced by doPeriodicSlowCallback(), getLiveData(), and initGearController().
◆ globalConfigurationVersion
| int Engine::globalConfigurationVersion = 0 |
This counter is incremented every time user adjusts ECU parameters online (either via rusEfi console or other tuning software)
Definition at line 323 of file engine.h.
Referenced by getGlobalConfigurationVersion(), and incrementGlobalConfigurationVersion().
◆ hardSparkLimiter
| SoftSparkLimiter Engine::hardSparkLimiter {true} |
Definition at line 228 of file engine.h.
Referenced by onTriggerEventSparkLogic(), and EngineState::updateSparkSkip().
◆ ignitionEvents
| IgnitionEventList Engine::ignitionEvents {} |
Definition at line 297 of file engine.h.
Referenced by getIgnitionEvents(), initDataStructures(), initializeIgnitionActions(), onEngineHasStopped(), and onTriggerEventSparkLogic().
◆ ignitionState
| IgnitionState Engine::ignitionState {} |
Definition at line 247 of file engine.h.
Referenced by configureRusefiLuaHooks(), fireSparkAndPrepareNextSchedule(), getAdvanceCorrections(), getCoilDutyCycle(), getLiveData(), getOutputValueByHash(), getRunningAdvance(), initializeIgnitionActions(), onTriggerEventSparkLogic(), EngineState::periodicFastCallback(), prepareIgnitionSchedule(), resetLua(), and turnSparkPinHighStartCharging().
◆ injectionEvents
| FuelSchedule Engine::injectionEvents {} |
Definition at line 296 of file engine.h.
Referenced by commonInitEngineController(), getFuelSchedule(), getLiveData(), prepareOutputSignals(), resetAccel(), RpmCalculator::setRpmValue(), and updateFuelInfo().
◆ isFunctionalTestMode
| bool Engine::isFunctionalTestMode = false |
are we running any kind of functional test? this affect some areas
Definition at line 348 of file engine.h.
Referenced by enableOrDisable(), and resetEngineSnifferIfInTestMode().
◆ isPwmEnabled
| bool Engine::isPwmEnabled = true |
Definition at line 121 of file engine.h.
Referenced by applyPinState(), and enableOrDisable().
◆ isRunningPwmTest
| bool Engine::isRunningPwmTest = false |
Definition at line 342 of file engine.h.
Referenced by efiWatchdog().
◆ lambdaMonitor
| LambdaMonitor Engine::lambdaMonitor {} |
Definition at line 240 of file engine.h.
Referenced by getLiveData(), getOutputValueByHash(), EngineState::periodicFastCallback(), populateFrame(), and LimpManager::updateState().
◆ launchController
| LaunchControlBase Engine::launchController {} |
Definition at line 224 of file engine.h.
Referenced by canDashboardHaltech(), configureRusefiLuaHooks(), getLiveData(), getOutputValueByHash(), getRunningAdvance(), getRunningFuel(), EngineState::periodicFastCallback(), updateFlags(), EngineState::updateSparkSkip(), and LimpManager::updateState().
◆ luaDigitalInputState
| SimpleSwitchedState Engine::luaDigitalInputState[LUA_DIGITAL_INPUT_COUNT] {} |
Definition at line 221 of file engine.h.
Referenced by pokeAuxDigital(), and sendQcBenchAuxDigitalCounters().
◆ m_ltit
| LongTermIdleTrim Engine::m_ltit |
Definition at line 139 of file engine.h.
Referenced by getLiveData(), IdleController::init(), IdleController::onFastCallback(), IdleController::onIgnitionStateChanged(), and IdleController::updateLtit().
◆ mockAirmassModel
| AirmassModelBase* Engine::mockAirmassModel {} |
◆ needTdcCallback
| bool Engine::needTdcCallback = true |
Definition at line 265 of file engine.h.
Referenced by onTdcCallback().
◆ onIgnitionEvent
| std::function<void(IgnitionEvent*, bool)> Engine::onIgnitionEvent |
Definition at line 288 of file engine.h.
Referenced by fireSparkAndPrepareNextSchedule(), and turnSparkPinHighStartCharging().
◆ onScheduleOverFireSparkAndPrepareNextSchedule
| std::function<void(const IgnitionEvent&, efitick_t)> Engine::onScheduleOverFireSparkAndPrepareNextSchedule = [](const IgnitionEvent&, efitick_t) -> void {} |
◆ onScheduleTurnSparkPinHighStartCharging
| std::function<void(const IgnitionEvent&, efitick_t, angle_t, efitick_t)> Engine::onScheduleTurnSparkPinHighStartCharging = [](const IgnitionEvent&, efitick_t, angle_t, efitick_t) -> void {} |
◆ outputChannels
| TunerStudioOutputChannels Engine::outputChannels {} |
Definition at line 113 of file engine.h.
Referenced by adcOnchipSlowUpdate(), attachMsdSdCard(), baseMCUInit(), FlexSensor::callback(), canInfo(), checkIfTuningVeNow(), EtbController::checkStatus(), TunerStudio::cmdOutputChannels(), completionCallback(), configureRusefiLuaHooks(), deattachMsdSdCard(), TriggerCentral::decodeMapCam(), deinitMmc(), endAveraging(), executorStatistics(), fastAdcDoneCB(), fastAdcErrorCB(), getAdvanceCorrections(), VvtController::getClosedLoop(), BoostController::getClosedLoop(), EtbController::getClosedLoopAutotune(), IdleController::getIdlePosition(), getLiveData(), BoostController::getOpenLoop(), getOutputValueByHash(), SpeedDensityAirmass::getPredictiveMap(), getRunningAdvance(), BoostController::getSetpoint(), VvtController::getSetpoint(), FuelComputer::getTargetLambda(), getTunerStudioOutputChannels(), AirmassVeModelBase::getVe(), handleFuel(), handleShaftSignal(), handleVvtCamSignal(), handleWidebandCan(), initElectronicThrottle(), initMmc(), TriggerCentral::isMapCamSync(), SpeedDensityAirmass::logAndGetFallback(), lua_setDebug(), luaHeapAlloc(), mapAveragingAdcCallback(), mountMmc(), onFastAdcComplete(), AlternatorController::onFastCallback(), PrimeController::onPrimeStart(), onTransitionEvent(), onTriggerEventSparkLogic(), InjectionEvent::onTriggerTooth(), pingWideband(), populateFrame(), populateFrame(), StepperMotorBase::postCurrentPosition(), GearControllerBase::postState(), preCalculate(), prepareCylinderIgnitionSchedule(), printErrorCounters(), printFullAdcReport(), printUid(), processLastKnockEvent(), readGppwmChannel(), WarningCodeState::refreshTs(), reportLogicAnalyzerToTS(), runBench(), runOneLua(), sdFormat(), sdLoggerCreateFile(), IgnitionOutputPin::setHigh(), IgnitionOutputPin::setLow(), EtbController::setOutput(), setStatus(), setToothLogReady(), slowAdcErrorCB(), startAveraging(), AdcDevice::startConversionI(), startLua(), MapAverager::stop(), ShutdownController::stopEngine(), tle8888PostState(), triggerScopeDisable(), triggerScopeGetBuffer(), tsCalibrationIsIdle(), tsCalibrationSetData(), tsCalibrationSetIdle(), unmountMmc(), InjectionEvent::update(), SimpleTransmissionController::update(), updateDevConsoleState(), updateEgtSensors(), updateFlags(), updateFuelCorrections(), updateFuelInfo(), updateFuelResults(), updateFuelSensors(), updateGppwm(), updateIgnition(), updateLambda(), updateMiscSensors(), updatePressures(), updateRawSensors(), updateSdCardLiveFlags(), updateTempSensors(), updateThrottles(), updateTunerStudioState(), updateVehicleSpeed(), updateVvtSensors(), and CanTxMessage::~CanTxMessage().
◆ pauseCANdueToSerial
| bool Engine::pauseCANdueToSerial = false |
ELM327 cannot handle both RX and TX at the same time, we have to stay quite once first ISO/TP packet was detected this is a pretty temporary hack only while we are trying ELM327, long term ISO/TP and rusEFI broadcast should find a way to coexists
Definition at line 127 of file engine.h.
Referenced by CanWrite::PeriodicTask(), and CanStreamerState::receiveFrame().
◆ rotationalIdleController
| RotationalIdle Engine::rotationalIdleController {} |
◆ rpmCalculator
| RpmCalculator Engine::rpmCalculator {} |
Definition at line 314 of file engine.h.
Referenced by commonInitEngineController(), configureRusefiLuaHooks(), IdleController::determinePhase(), disengageStarterIfNeeded(), doPeriodicSlowCallback(), enableTriggerStimulator(), executeTSCommand(), IgnitionState::getAdvance(), ShortTermFuelTrim::getCorrectionState(), getCrankingAdvance(), getCrankingFuel(), IdleController::getCrankingTaperFraction(), TriggerCentral::getCurrentEnginePhase(), getCurrentIgnitionMode(), getEngineRotationState(), getInjectionMass(), getPostCrankingFuelCorrection(), IgnitionState::getSparkHardwareLatencyCorrection(), FanController::getState(), TriggerCentral::handleShaftSignal(), LtftState::load(), mainTriggerCallback(), onEcuStartDoSomethingTriggerInputPins(), VvtController::onFastCallback(), WallFuelController::onFastCallback(), TripOdometer::onSlowCallback(), PrimaryTriggerDecoder::onTriggerError(), OnTriggerStateProperState(), OnTriggerSynchronizationLost(), EngineState::periodicFastCallback(), periodicSlowCallback(), rpmShaftPositionCallback(), scheduleByAngle(), StepperMotorBase::setInitialPosition(), slowStartStopButtonCallback(), startKnockSampling(), startStopButtonToggle(), storageAllowWriteID(), tle8888startup(), LimpManager::updateState(), and updateTunerStudioState().
◆ scheduler [1/3]
| SingleTimerExecutor Engine::scheduler {} |
Definition at line 279 of file engine.h.
Referenced by applyIACposition(), executorStatistics(), fireSparkAndPrepareNextSchedule(), getScheduler(), globalTimerCallback(), TachometerModule::init(), Generic4TransmissionController::init(), Gm4l6xTransmissionController::init(), initAlternatorCtrl(), initDcMotor(), initDcMotor(), initGpPwm(), initSpeedometer(), initVrThresholdPwm(), runBench(), scheduleByAngle(), TriggerScheduler::scheduleEventsUntilNextTriggerTooth(), scheduleSparkEvent(), startBoostPin(), startPwm(), startSimulatedTriggerSignal(), triggerScopeGetBuffer(), turnVvtPidOn(), validateHardwareTimer(), and watchDogBuddyCallback().
◆ scheduler [2/3]
◆ scheduler [3/3]
◆ secondListener
| TriggerStateListener* Engine::secondListener = nullptr |
Definition at line 255 of file engine.h.
Referenced by nextListener().
◆ sensors
| SensorsState Engine::sensors {} |
Definition at line 361 of file engine.h.
Referenced by processCanRxImu_BoschM5_10_RollX(), processCanRxImu_BoschM5_10_YawY(), processCanRxImu_BoschM5_10_Z(), and updateTunerStudioState().
◆ sent_state
| sent_state_s Engine::sent_state {} |
Definition at line 356 of file engine.h.
Referenced by getLiveData(), and SentDecoderThread().
◆ shiftTorqueReductionController
| ShiftTorqueReductionController Engine::shiftTorqueReductionController {} |
Definition at line 225 of file engine.h.
Referenced by getLiveData(), getOutputValueByHash(), getRunningAdvance(), EngineState::periodicFastCallback(), and EngineState::updateSparkSkip().
◆ slowCallBackWasInvoked
| bool Engine::slowCallBackWasInvoked = false |
Definition at line 312 of file engine.h.
Referenced by EngineState::periodicFastCallback(), and periodicSlowCallback().
◆ softSparkLimiter
| SoftSparkLimiter Engine::softSparkLimiter {false} |
Definition at line 226 of file engine.h.
Referenced by onTriggerEventSparkLogic(), and EngineState::updateSparkSkip().
◆ startStopState
| StartStopState Engine::startStopState {} |
Definition at line 110 of file engine.h.
Referenced by disengageStarterIfNeeded(), doStartCranking(), initStartStopButton(), and slowStartStopButtonCallback().
◆ tdcMarkEnabled
| bool Engine::tdcMarkEnabled = true |
Definition at line 309 of file engine.h.
Referenced by tdcMarkCallback().
◆ tdcScheduler
| scheduling_s Engine::tdcScheduler[2] {} |
◆ timeToStopIdleTest
| efitimeus_t Engine::timeToStopIdleTest {} |
Definition at line 359 of file engine.h.
Referenced by applyIACposition(), finishIdleTestIfNeeded(), and startIdleBench().
◆ triggerCentral
| TriggerCentral Engine::triggerCentral {} |
Definition at line 326 of file engine.h.
Referenced by applyIACposition(), TriggerCentral::applyShapesConfiguration(), canDashboardHaltech(), RpmCalculator::checkIfSpinning(), EtbController::checkStatus(), configureRusefiLuaHooks(), disableTriggerStimulator(), efiWatchdog(), emulatorApplyPinState(), enableExternalTriggerStimulator(), enableTriggerStimulator(), extIonCallback(), HpfpLobe::findNextLobe(), getAdvanceCorrections(), getCurrentIgnitionMode(), getLiveData(), getLiveData(), RpmCalculator::getOperationMode(), getOutputValueByHash(), getTriggerCentral(), injectEngineReferences(), isTriggerErrorNow(), VvtController::observePlant(), HpfpController::onFastCallback(), IdleController::onFastCallback(), RpmCalculator::onSlowCallback(), FuelPumpController::onSlowCallback(), PrimaryTriggerDecoder::onTriggerError(), OnTriggerSynchronization(), OnTriggerSynchronizationLost(), periodicSlowCallback(), populateFrame(), prepareOutputSignals(), readGppwmChannel(), rpmShaftPositionCallback(), sendQcBenchEventCounters(), SetNextCompositeEntry(), RpmCalculator::setSpinningUp(), RpmCalculator::setStopSpinning(), startSimulatedTriggerSignal(), startTriggerInputPins(), storageAllowWriteID(), updateDevConsoleState(), updateSlowSensors(), LimpManager::updateState(), updateTriggerConfiguration(), updateTunerStudioState(), and updateVvtSensors().
The documentation for this class was generated from the following files:
- controllers/algo/engine.h
- controllers/algo/engine.cpp
- controllers/engine_cycle/knock_controller.cpp