#include <wall_fuel.h>


Public Types | |
| using | interface_t = IWallFuelController |
Public Member Functions | |
| void | onFastCallback () override |
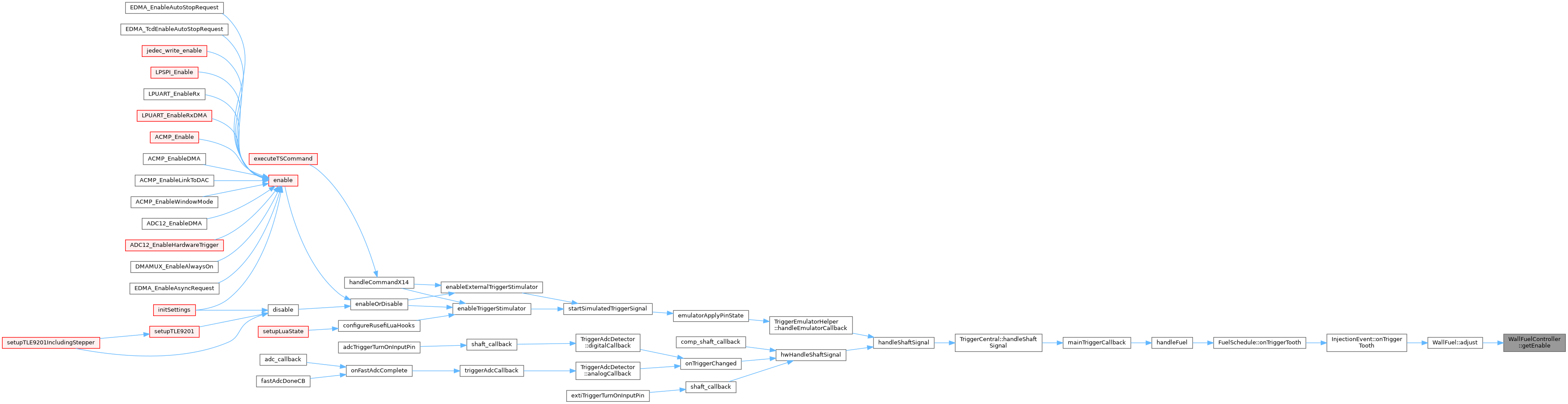
| bool | getEnable () const override |
| float | getAlpha () const override |
| float | getBeta () const override |
 Public Member Functions inherited from EngineModule Public Member Functions inherited from EngineModule | |
| virtual void | initNoConfiguration () |
| virtual void | setDefaultConfiguration () |
| virtual void | onConfigurationChange (engine_configuration_s const *) |
| virtual void | onSlowCallback () |
| virtual void | onEngineStop () |
| virtual void | onIgnitionStateChanged (bool) |
| virtual bool | needsDelayedShutoff () |
| virtual void | onEnginePhase (float, efitick_t, angle_t, angle_t) |
Protected Member Functions | |
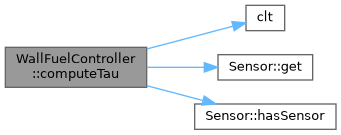
| float | computeTau () const |
| float | computeBeta () const |
Private Attributes | |
| bool | m_enable = false |
| float | m_alpha = 0 |
| float | m_beta = 0 |
Detailed Description
Definition at line 33 of file wall_fuel.h.
Member Typedef Documentation
◆ interface_t
Definition at line 35 of file wall_fuel.h.
Member Function Documentation
◆ computeBeta()
|
protected |
Definition at line 105 of file wall_fuel.cpp.
Referenced by onFastCallback().


◆ computeTau()
|
protected |
Definition at line 76 of file wall_fuel.cpp.
Referenced by onFastCallback().

◆ getAlpha()
|
inlineoverridevirtual |
Implements IWallFuelController.
Definition at line 43 of file wall_fuel.h.
◆ getBeta()
|
inlineoverridevirtual |
Implements IWallFuelController.
Definition at line 47 of file wall_fuel.h.
◆ getEnable()
|
inlineoverridevirtual |
Implements IWallFuelController.
Definition at line 39 of file wall_fuel.h.
Referenced by WallFuel::adjust().
◆ onFastCallback()
|
overridevirtual |
Reimplemented from EngineModule.
Definition at line 135 of file wall_fuel.cpp.

Field Documentation
◆ m_alpha
|
private |
Definition at line 57 of file wall_fuel.h.
Referenced by getAlpha(), and onFastCallback().
◆ m_beta
|
private |
Definition at line 58 of file wall_fuel.h.
Referenced by getBeta(), and onFastCallback().
◆ m_enable
|
private |
Definition at line 56 of file wall_fuel.h.
Referenced by getEnable(), and onFastCallback().
The documentation for this class was generated from the following files:
- controllers/algo/wall_fuel.h
- controllers/algo/wall_fuel.cpp