Detailed Description
Controllers package entry point code.
- Date
- Feb 7, 2013
This file is part of rusEfi - see http://rusefi.com
rusEfi is free software; you can redistribute it and/or modify it under the terms of the GNU General Public License as published by the Free Software Foundation; either version 3 of the License, or (at your option) any later version.
rusEfi is distributed in the hope that it will be useful, but WITHOUT ANY WARRANTY; without even the implied warranty of MERCHANTABILITY or FITNESS FOR A PARTICULAR PURPOSE. See the GNU General Public License for more details.
You should have received a copy of the GNU General Public License along with this program. If not, see http://www.gnu.org/licenses/.
Definition in file engine_controller.cpp.
Functions | |
| void | initDataStructures () |
| static void | doPeriodicSlowCallback () |
| static void | resetAccel () |
| void | initPeriodicEvents () |
| char * | getPinNameByAdcChannel (const char *msg, adc_channel_e hwChannel, char *buffer, size_t bufferSize) |
| static void | printSensorInfo () |
| static void | getShort (int offset) |
| static void | getByte (int offset) |
| static void | setBit (const char *offsetStr, const char *bitStr, const char *valueStr) |
| static void | setShort (const int offset, const int value) |
| static void | setByte (const int offset, const int value) |
| static void | getBit (int offset, int bit) |
| static void | getInt (int offset) |
| static void | setInt (const int offset, const int value) |
| static void | getFloat (int offset) |
| static void | setFloat (const char *offsetStr, const char *valueStr) |
| static void | initConfigActions () |
| void | commonInitEngineController () |
| PUBLIC_API_WEAK bool | validateBoardConfig () |
| static bool | validateGdi () |
| bool | validateConfigOnStartUpOrBurn () |
| bool | validateConfigOnStartUpOrBurn (bool isRunningOnBurn) |
| void | commonEarlyInit () |
| void | initRealHardwareEngineController () |
| int | getRusEfiVersion () |
Variables | |
| Engine ___engine | CCM_OPTIONAL |
| Engine * | engine |
| static PeriodicFastController | fastController |
| static PeriodicSlowController | slowController |
| static EngineStateBlinkingTask | engineStateBlinkingTask |
Function Documentation
◆ commonEarlyInit()
| void commonEarlyInit | ( | ) |
Initialize hardware drivers
Definition at line 719 of file engine_controller.cpp.
Referenced by initEfiWithConfig().


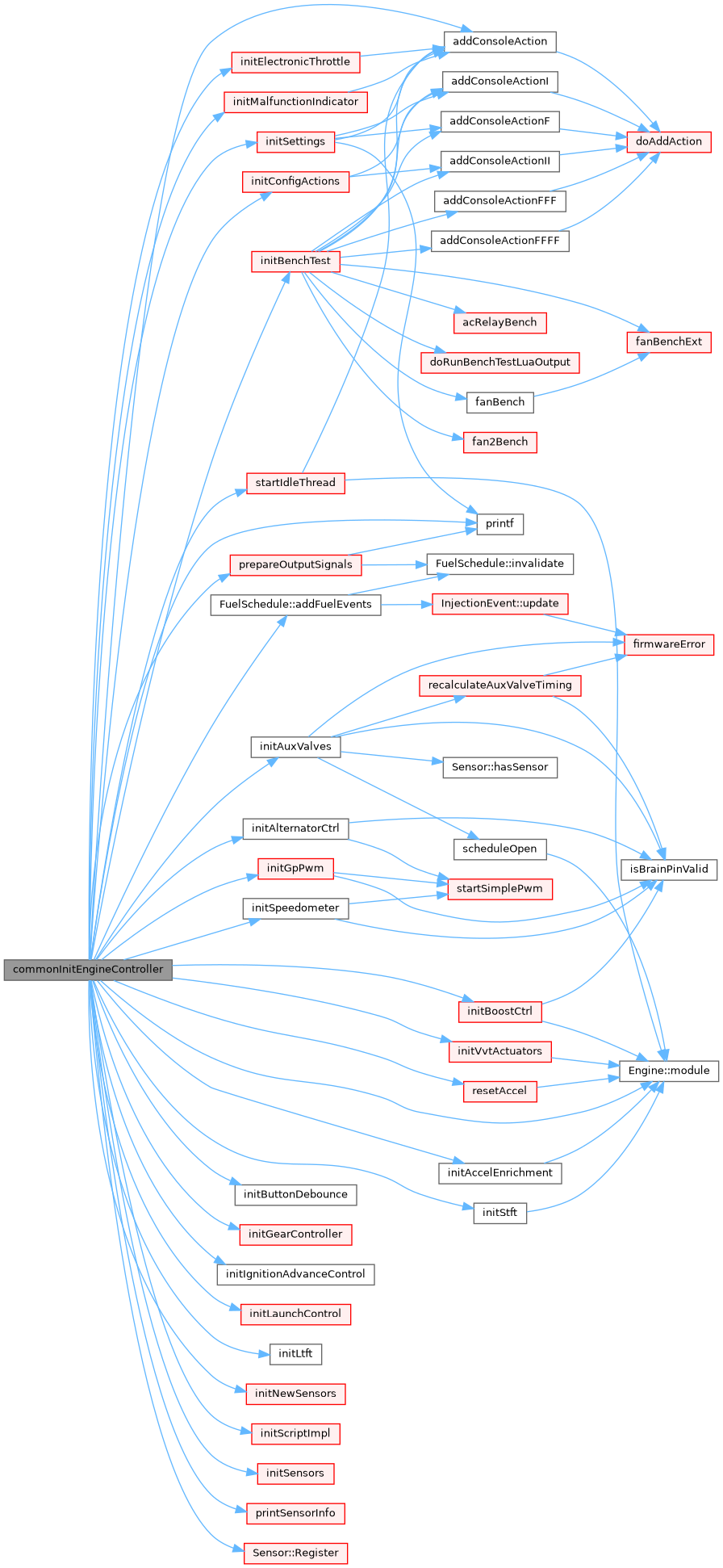
◆ commonInitEngineController()
| void commonInitEngineController | ( | ) |
This has to go after 'enginePins.startPins()' in order to properly detect un-assigned output pins
Definition at line 386 of file engine_controller.cpp.
Referenced by initRealHardwareEngineController().

◆ doPeriodicSlowCallback()
|
static |
Definition at line 179 of file engine_controller.cpp.

◆ getBit()
|
static |
this response is part of rusEfi console API
Definition at line 308 of file engine_controller.cpp.
Referenced by initConfigActions().

◆ getByte()
|
static |
this response is part of rusEfi console API
Definition at line 251 of file engine_controller.cpp.
Referenced by initConfigActions(), and setByte().

◆ getFloat()
|
static |
this response is part of rusEfi console API
Definition at line 339 of file engine_controller.cpp.
Referenced by initConfigActions(), and setFloat().

◆ getInt()
|
static |
this response is part of rusEfi console API
Definition at line 319 of file engine_controller.cpp.
Referenced by initConfigActions(), and setInt().

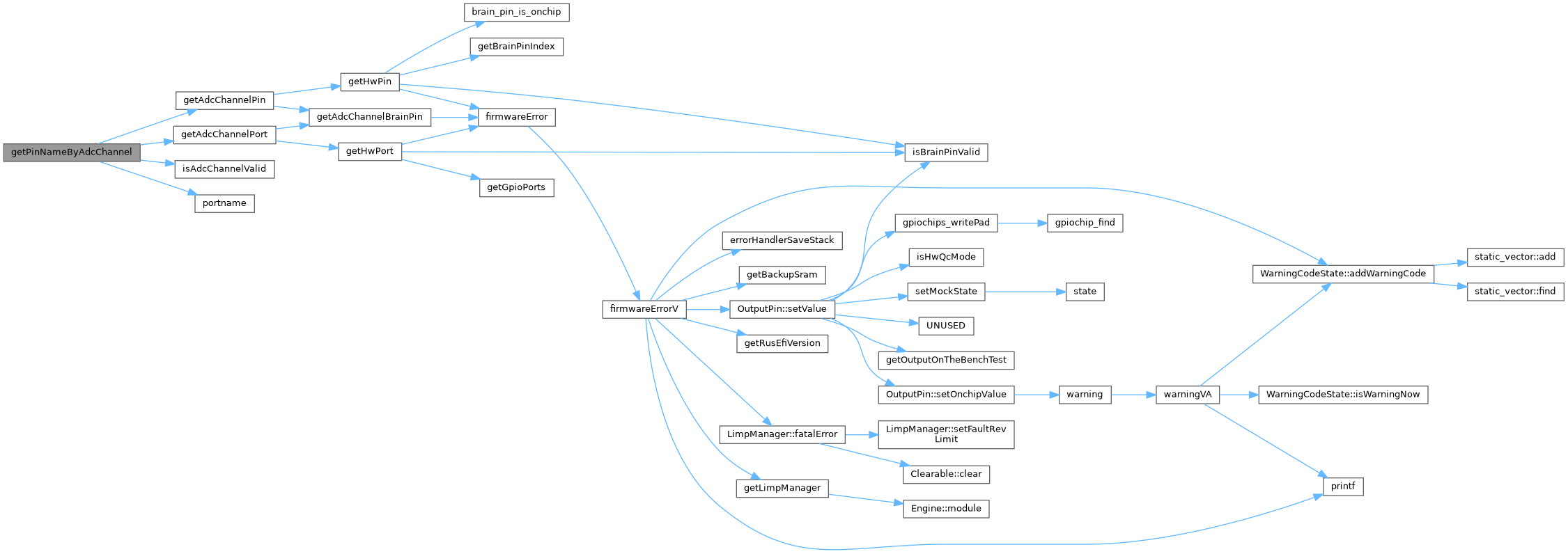
◆ getPinNameByAdcChannel()
| char * getPinNameByAdcChannel | ( | const char * | msg, |
| adc_channel_e | hwChannel, | ||
| char * | buffer, | ||
| size_t | bufferSize | ||
| ) |
Definition at line 212 of file engine_controller.cpp.
Referenced by AdcSubscription::PrintInfo(), and printMAPInfo().

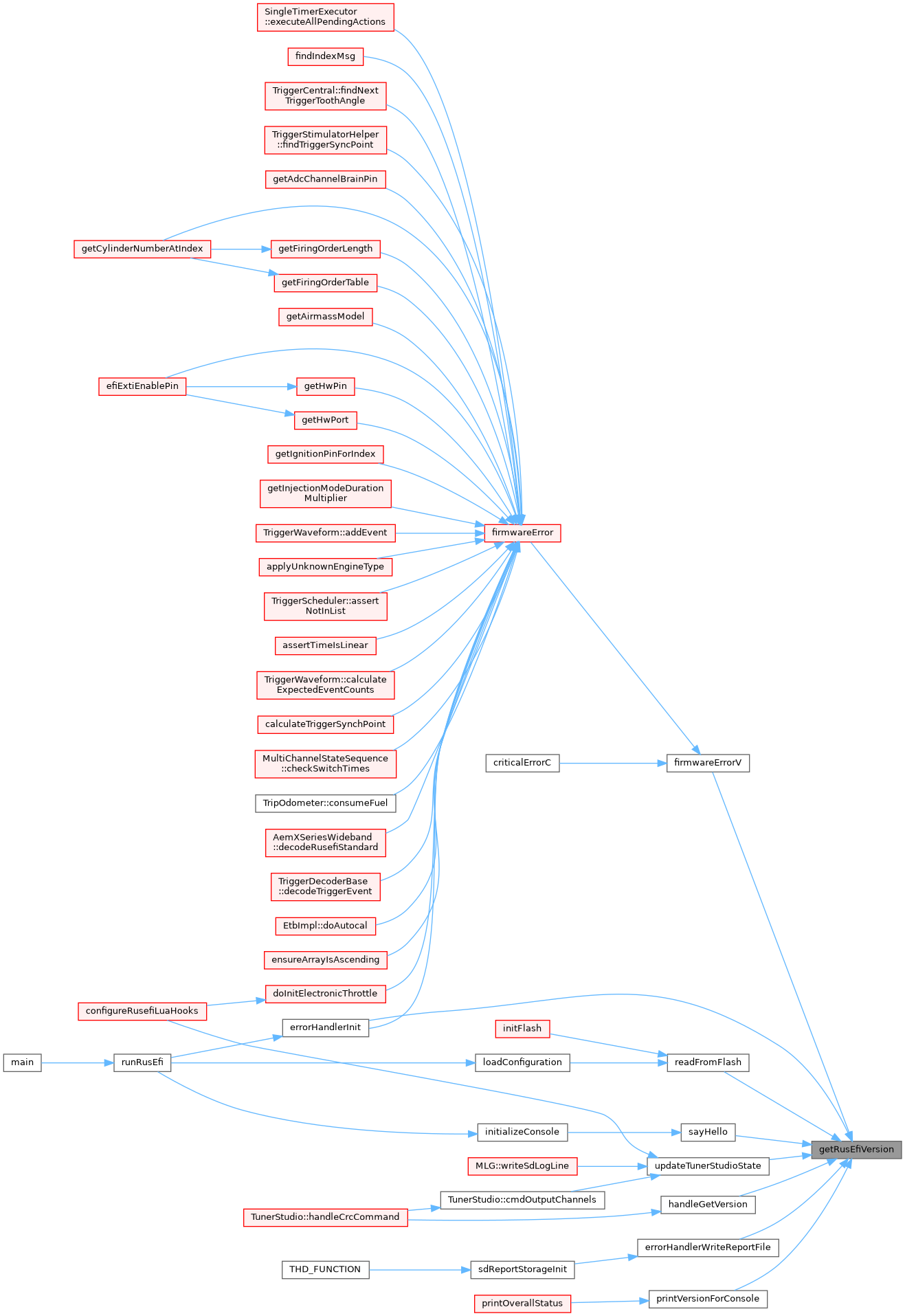
◆ getRusEfiVersion()
| int getRusEfiVersion | ( | ) |
See also SIGNATURE_HASH
Definition at line 777 of file engine_controller.cpp.
Referenced by errorHandlerInit(), errorHandlerWriteReportFile(), firmwareErrorV(), handleGetVersion(), printVersionForConsole(), readFromFlash(), sayHello(), and updateTunerStudioState().
◆ getShort()
|
static |
this response is part of rusEfi console API
Definition at line 240 of file engine_controller.cpp.
Referenced by initConfigActions(), and setShort().

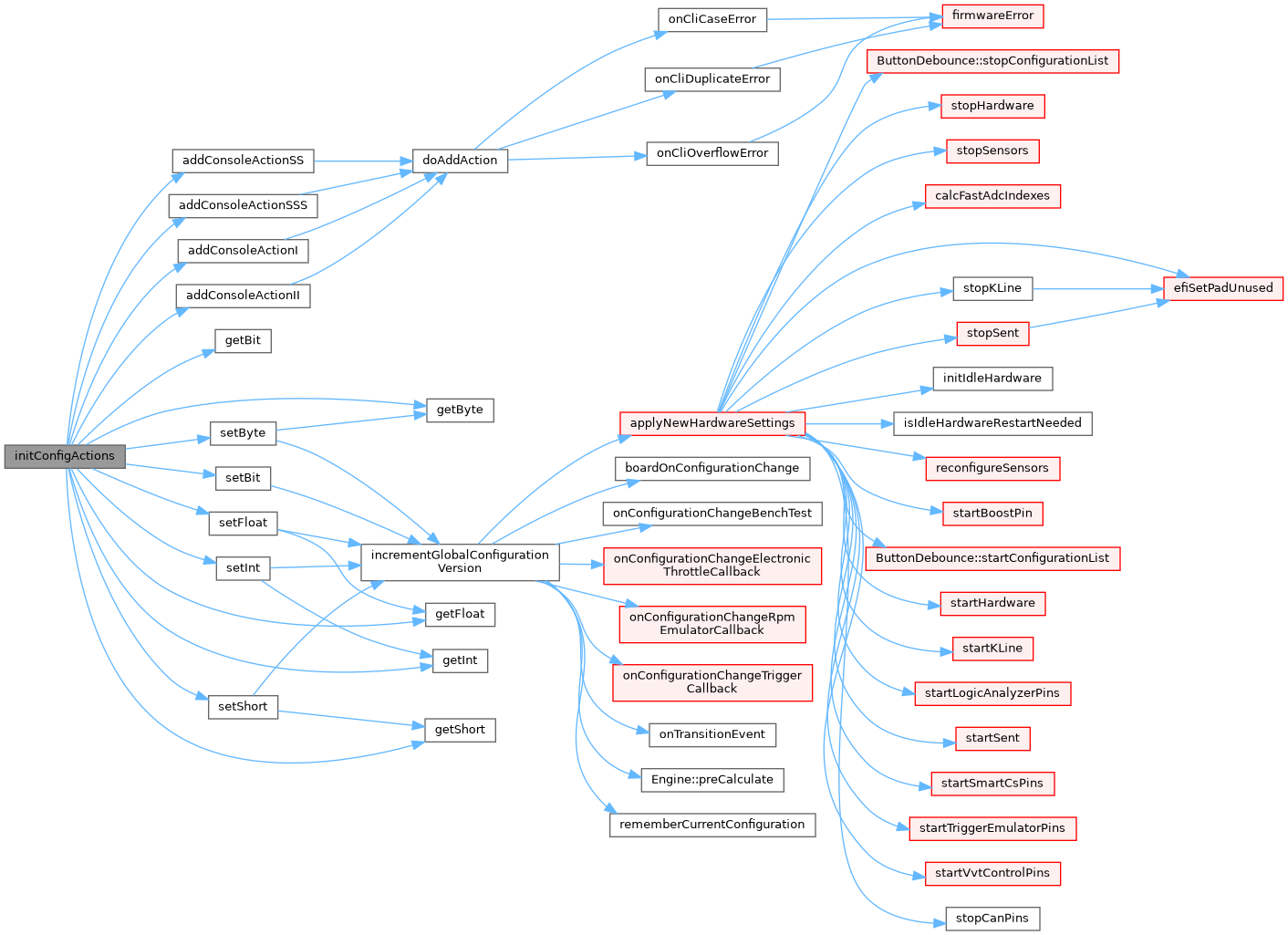
◆ initConfigActions()
|
static |
Definition at line 369 of file engine_controller.cpp.
Referenced by commonInitEngineController().

◆ initDataStructures()
| void initDataStructures | ( | ) |
Definition at line 102 of file engine_controller.cpp.
Referenced by runRusEfi().


◆ initPeriodicEvents()
| void initPeriodicEvents | ( | ) |
Definition at line 207 of file engine_controller.cpp.
Referenced by runRusEfi().

◆ initRealHardwareEngineController()
| void initRealHardwareEngineController | ( | ) |
Definition at line 755 of file engine_controller.cpp.
Referenced by initEfiWithConfig().


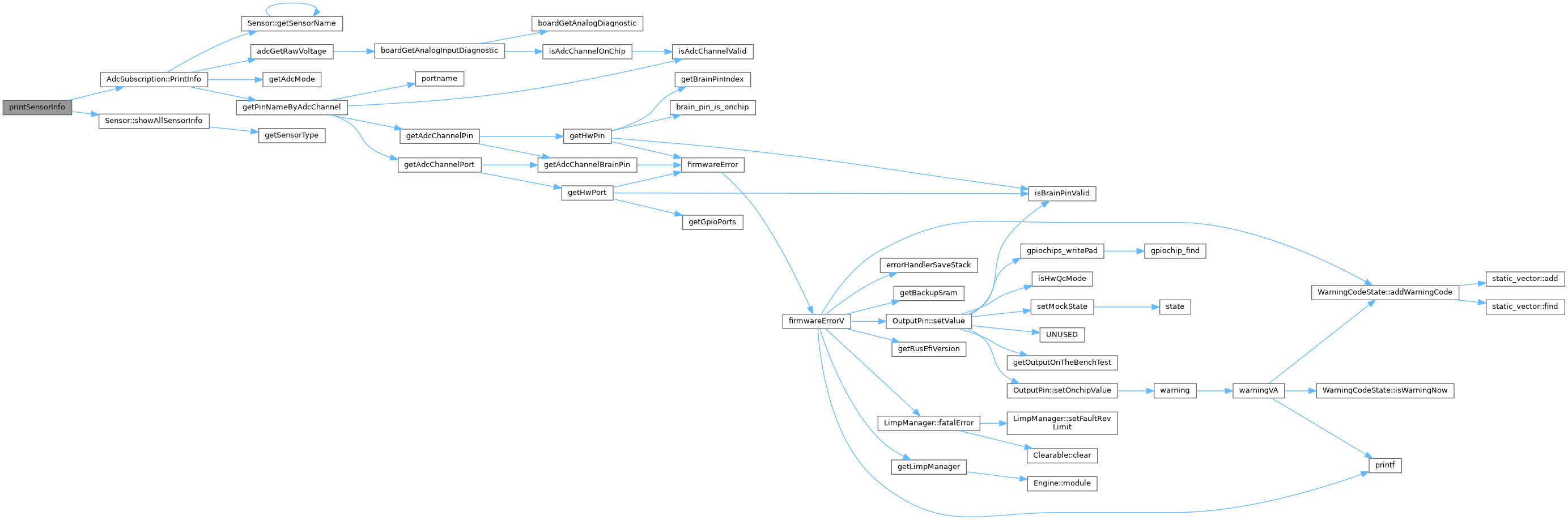
◆ printSensorInfo()
|
static |
Definition at line 227 of file engine_controller.cpp.
Referenced by commonInitEngineController().

◆ resetAccel()
|
static |
Definition at line 168 of file engine_controller.cpp.
Referenced by commonInitEngineController(), and doPeriodicSlowCallback().


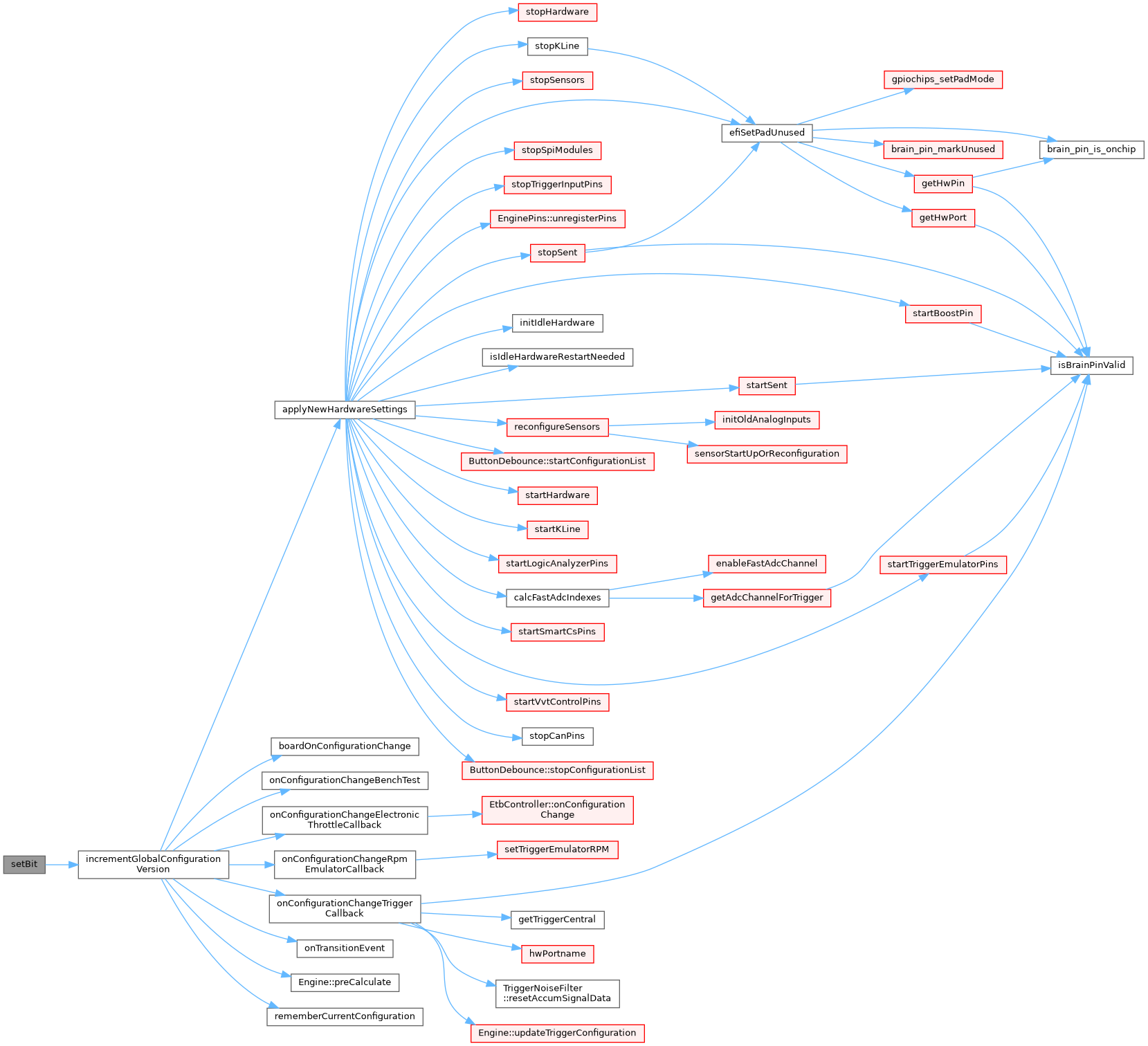
◆ setBit()
this response is part of rusEfi console API
Definition at line 262 of file engine_controller.cpp.
Referenced by initConfigActions().

◆ setByte()
|
static |
Definition at line 299 of file engine_controller.cpp.
Referenced by initConfigActions().


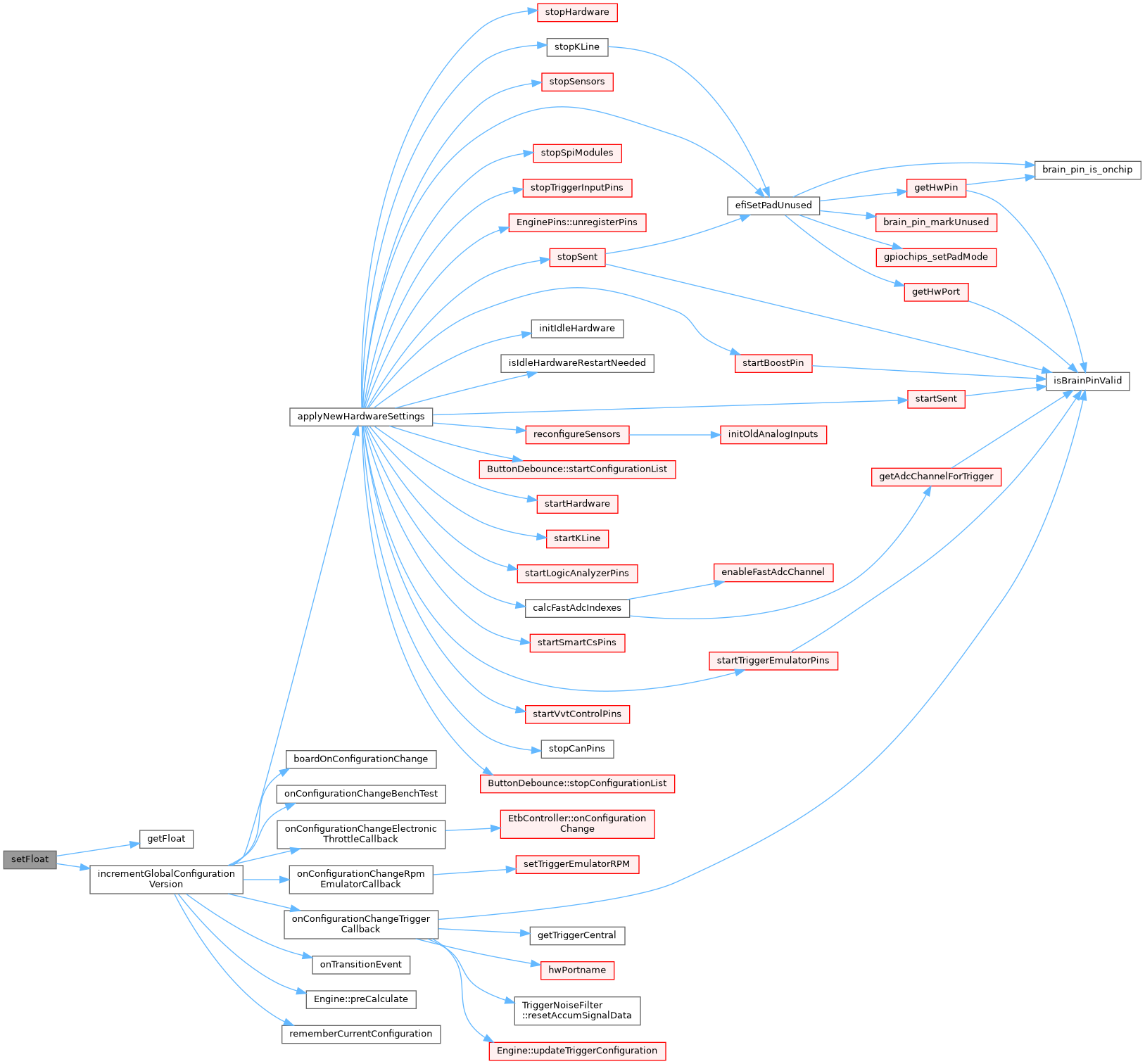
◆ setFloat()
Definition at line 350 of file engine_controller.cpp.
Referenced by initConfigActions().

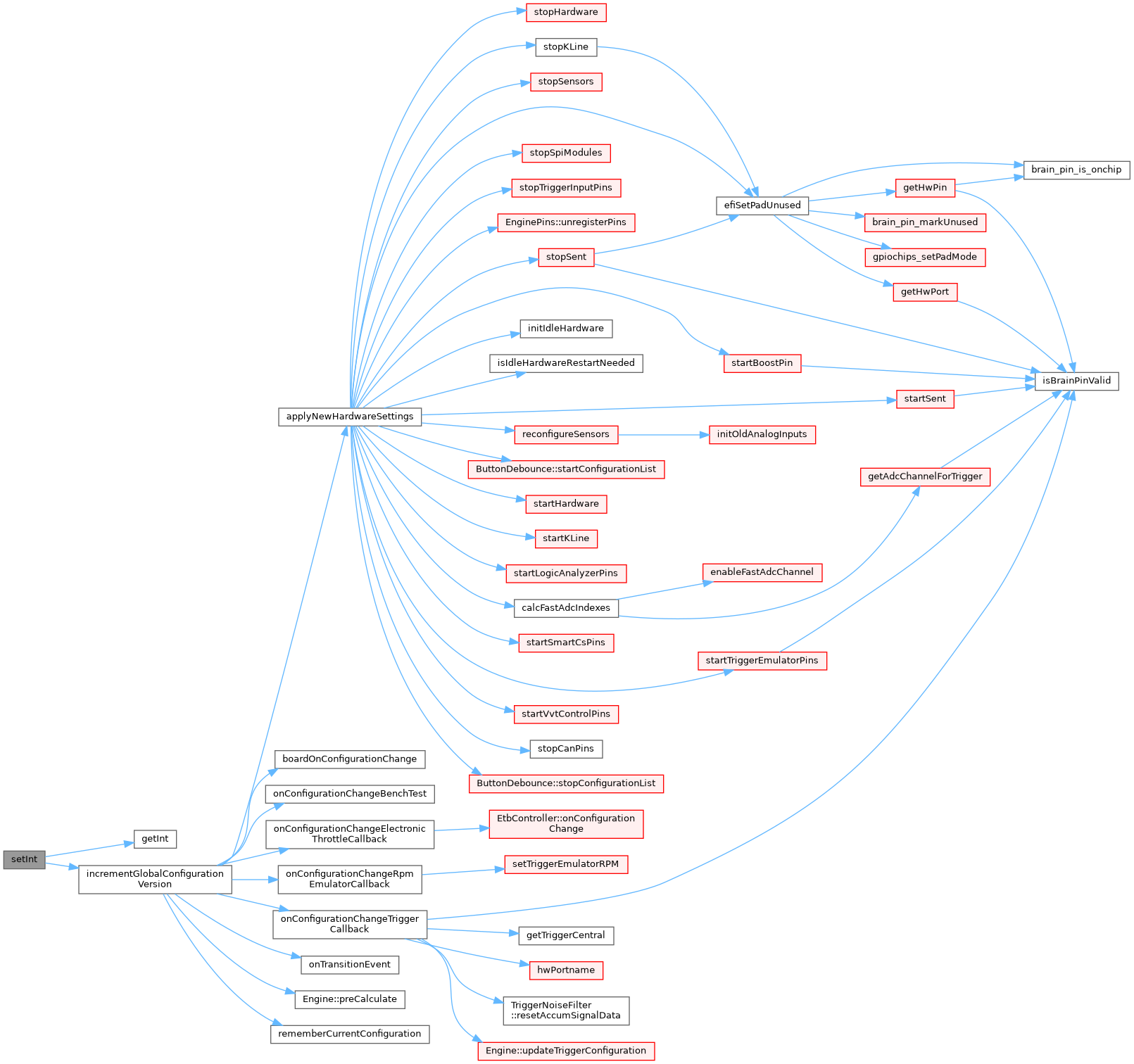
◆ setInt()
|
static |
Definition at line 330 of file engine_controller.cpp.
Referenced by initConfigActions().

◆ setShort()
|
static |
Definition at line 290 of file engine_controller.cpp.
Referenced by initConfigActions().


◆ validateBoardConfig()
| PUBLIC_API_WEAK bool validateBoardConfig | ( | ) |
Definition at line 499 of file engine_controller.cpp.
Referenced by validateConfigOnStartUpOrBurn().

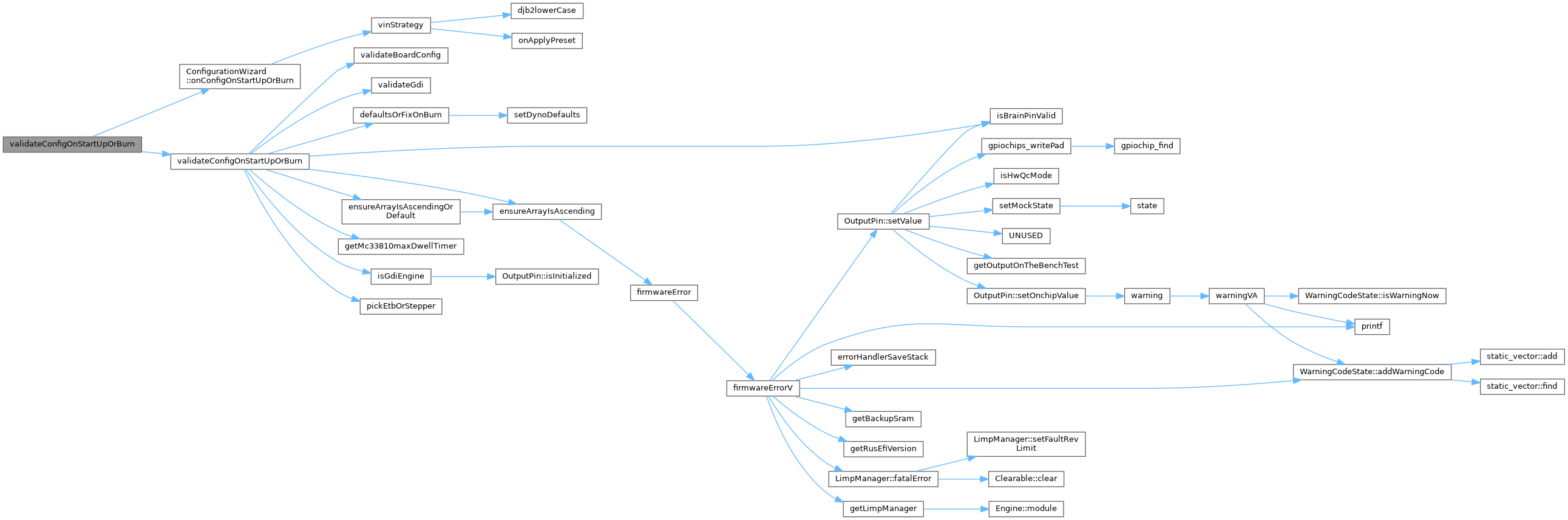
◆ validateConfigOnStartUpOrBurn() [1/2]
| bool validateConfigOnStartUpOrBurn | ( | ) |
Definition at line 519 of file engine_controller.cpp.
Referenced by handleBurnCommand(), initEfiWithConfig(), and validateConfigOnStartUpOrBurn().


◆ validateConfigOnStartUpOrBurn() [2/2]
Definition at line 712 of file engine_controller.cpp.
◆ validateGdi()
|
static |
Definition at line 503 of file engine_controller.cpp.
Referenced by validateConfigOnStartUpOrBurn().

Variable Documentation
◆ CCM_OPTIONAL
Would love to pass reference to configuration object into constructor but C++ does allow attributes after parenthesized initializer
Definition at line 92 of file engine_controller.cpp.
◆ engine
| Engine* engine |
Definition at line 96 of file engine_controller.cpp.
Referenced by commonInitEngineController(), doPeriodicSlowCallback(), initDataStructures(), and resetAccel().
◆ engineStateBlinkingTask
|
static |
Definition at line 166 of file engine_controller.cpp.
Referenced by initRealHardwareEngineController().
◆ fastController
|
static |
Definition at line 141 of file engine_controller.cpp.
Referenced by initPeriodicEvents().
◆ slowController
|
static |
Definition at line 142 of file engine_controller.cpp.
Referenced by initPeriodicEvents().