Detailed Description
Human-readable protocol status messages.
http://rusefi.com/forum/viewtopic.php?t=263 rusEfi console overview http://rusefi.com/forum/viewtopic.php?t=210 Commands overview
- Date
- Mar 15, 2013
This file is part of rusEfi - see http://rusefi.com
rusEfi is free software; you can redistribute it and/or modify it under the terms of the GNU General Public License as published by the Free Software Foundation; either version 3 of the License, or (at your option) any later version.
rusEfi is distributed in the hope that it will be useful, but WITHOUT ANY WARRANTY; without even the implied warranty of MERCHANTABILITY or FITNESS FOR A PARTICULAR PURPOSE. See the GNU General Public License for more details.
You should have received a copy of the GNU General Public License along with this program. If not, see http://www.gnu.org/licenses/.
Definition in file status_loop.cpp.
Functions | |
| static void | printVersionForConsole (const char *engineTypeName, const char *firmwareBuildId) |
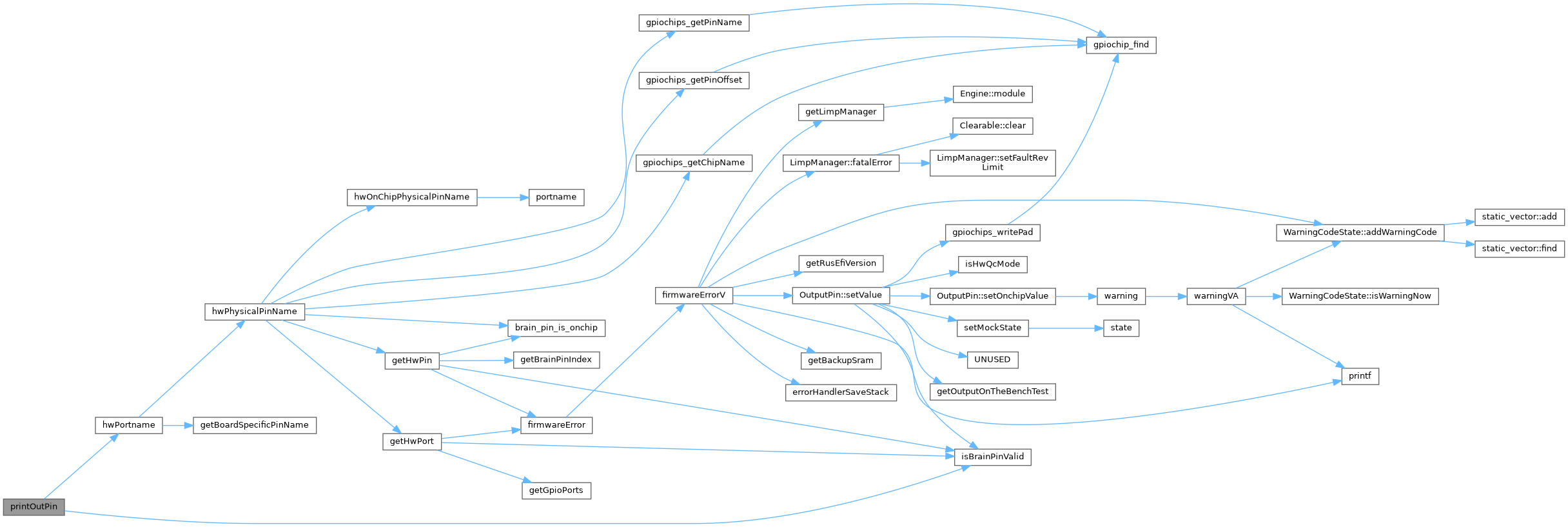
| static void | printOutPin (const char *pinName, brain_pin_e hwPin) |
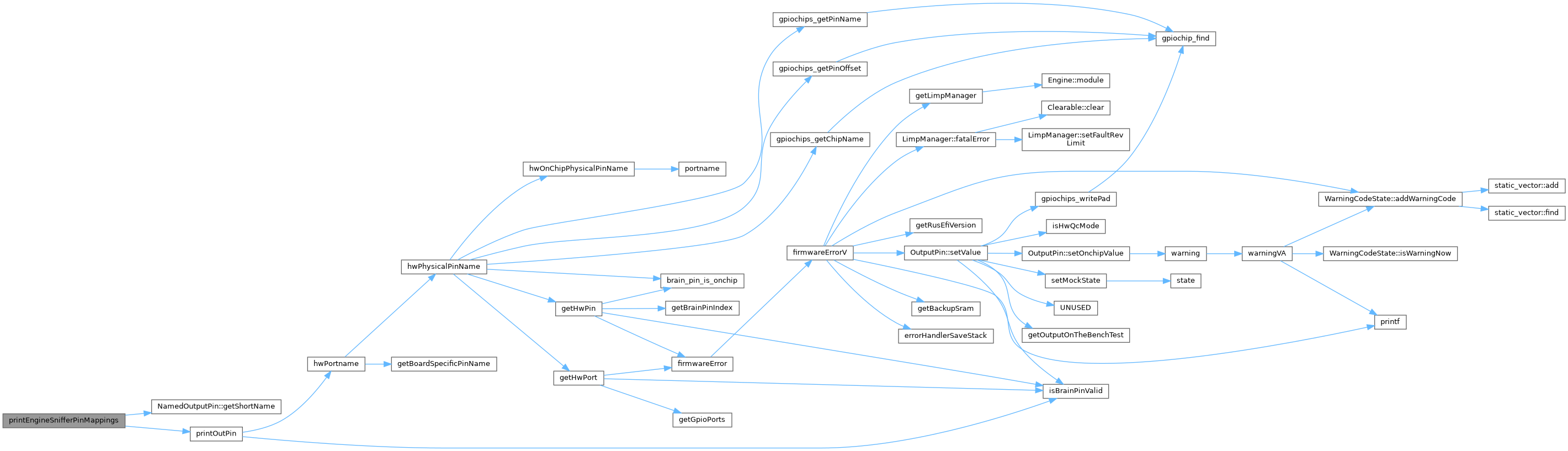
| static void | printEngineSnifferPinMappings () |
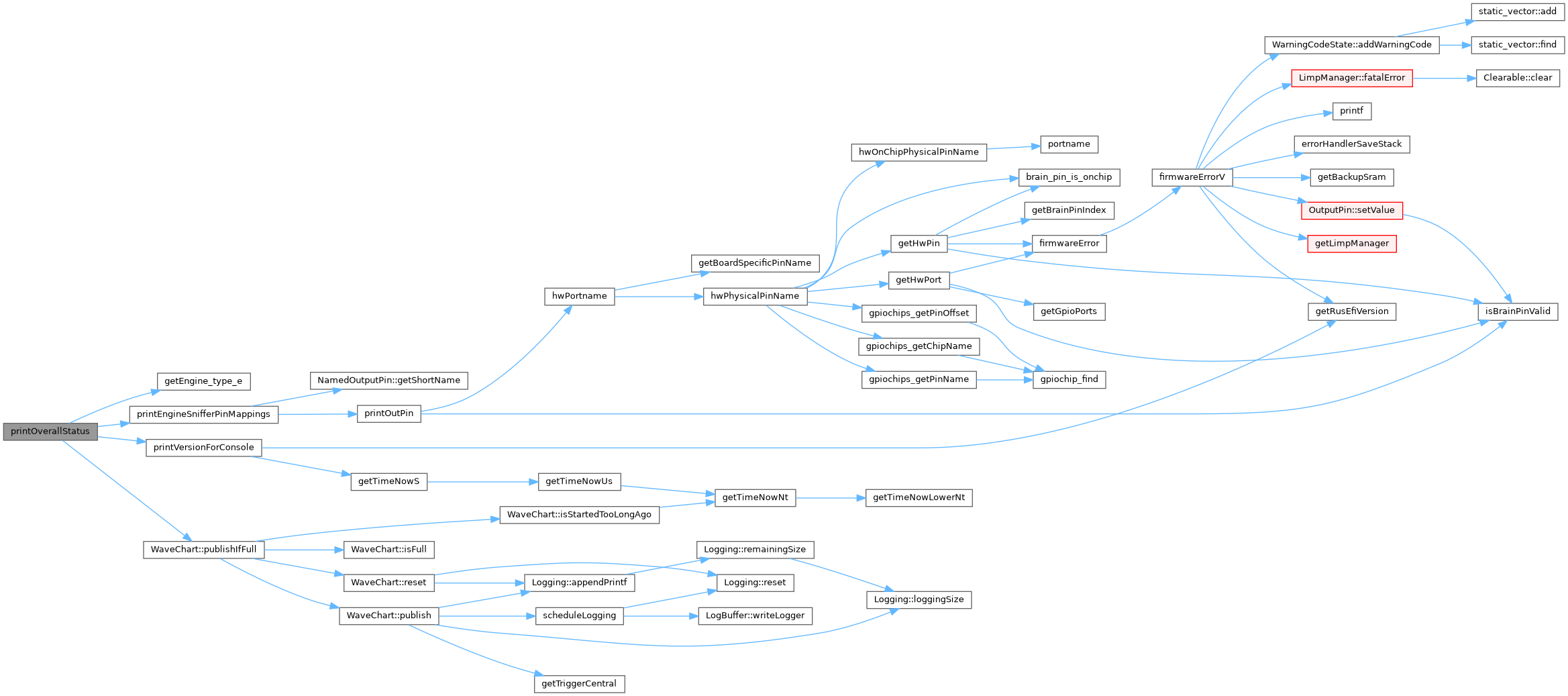
| void | printOverallStatus () |
| void | updateDevConsoleState () |
| Sends all pending data to rusEfi console. | |
| void | initWarningRunningPins () |
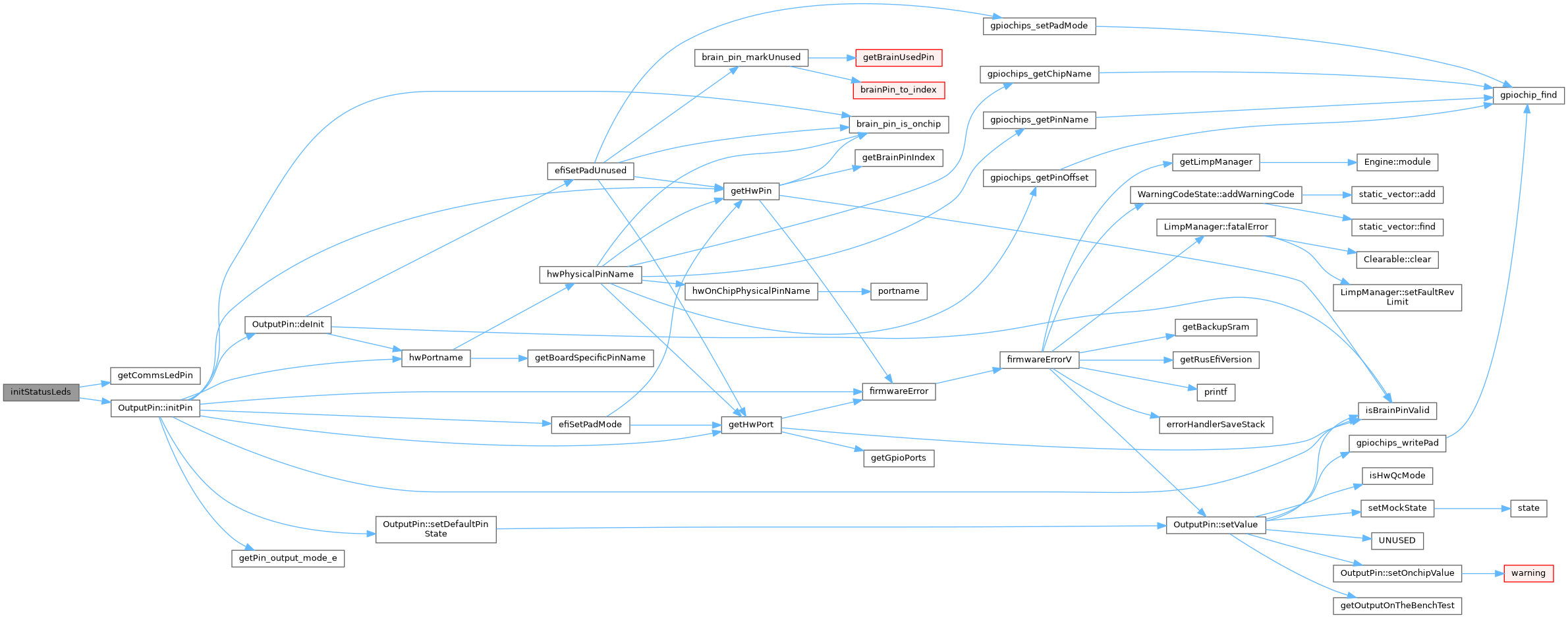
| static void | initStatusLeds () |
| static bool | isTriggerErrorNow () |
| static int | packEngineMode () |
| static void | updateTempSensors () |
| void | updateUnfilteredRawPedal () |
| static void | updateThrottles () |
| static void | updateLambda () |
| static void | updateFuelSensors () |
| static void | updateEgtSensors () |
| static void | updateVvtSensors () |
| static void | updateVehicleSpeed () |
| static void | updateRawSensors () |
| static void | updatePressures () |
| static void | updateMiscSensors () |
| static void | updateSensors () |
| static void | updateFuelCorrections () |
| static void | updateFuelResults () |
| static void | updateFuelInfo () |
| static void | updateIgnition (float rpm) |
| static void | updateFlags () |
| void | updateTunerStudioState () |
| void | startStatusThreads () |
Variables | |
| WaveChart | waveChart |
| int | maxTriggerReentrant |
| uint32_t | maxLockedDuration |
| static Timer | printVersionTimer |
| static char | logicAnalyzerBuffer [LOGIC_ANALYZER_BUFFER_SIZE] |
| static Logging | logicAnalyzerLogger ("logic analyzer", logicAnalyzerBuffer, sizeof(logicAnalyzerBuffer)) |
| static OutputPin * | leds [] |
| bool | consoleByteArrived |
| static CommunicationBlinkingTask | communicationsBlinkingTask |
| static SensorType | luaGaugeTypes [] |
Function Documentation
◆ initStatusLeds()
|
static |
Definition at line 235 of file status_loop.cpp.
Referenced by startStatusThreads().

◆ initWarningRunningPins()
| void initWarningRunningPins | ( | ) |
Definition at line 226 of file status_loop.cpp.
Referenced by initRealHardwareEngineController().


◆ isTriggerErrorNow()
|
static |
Definition at line 240 of file status_loop.cpp.
Referenced by updateFlags().


◆ packEngineMode()
|
static |
This is useful if we are changing engine mode dynamically For example http://rusefi.com/forum/viewtopic.php?f=5&t=1085
Definition at line 339 of file status_loop.cpp.
Referenced by updateTunerStudioState().

◆ printEngineSnifferPinMappings()
|
static |
Definition at line 126 of file status_loop.cpp.
Referenced by printOverallStatus().

◆ printOutPin()
|
static |
Definition at line 108 of file status_loop.cpp.
Referenced by printEngineSnifferPinMappings().

◆ printOverallStatus()
| void printOverallStatus | ( | ) |
we report the version every second - this way the console does not need to request it and we will display it pretty soon
Definition at line 145 of file status_loop.cpp.
Referenced by handleGetText().

◆ printVersionForConsole()
|
static |
Definition at line 96 of file status_loop.cpp.
Referenced by printOverallStatus().


◆ startStatusThreads()
| void startStatusThreads | ( | ) |
Definition at line 764 of file status_loop.cpp.
Referenced by commonEarlyInit().


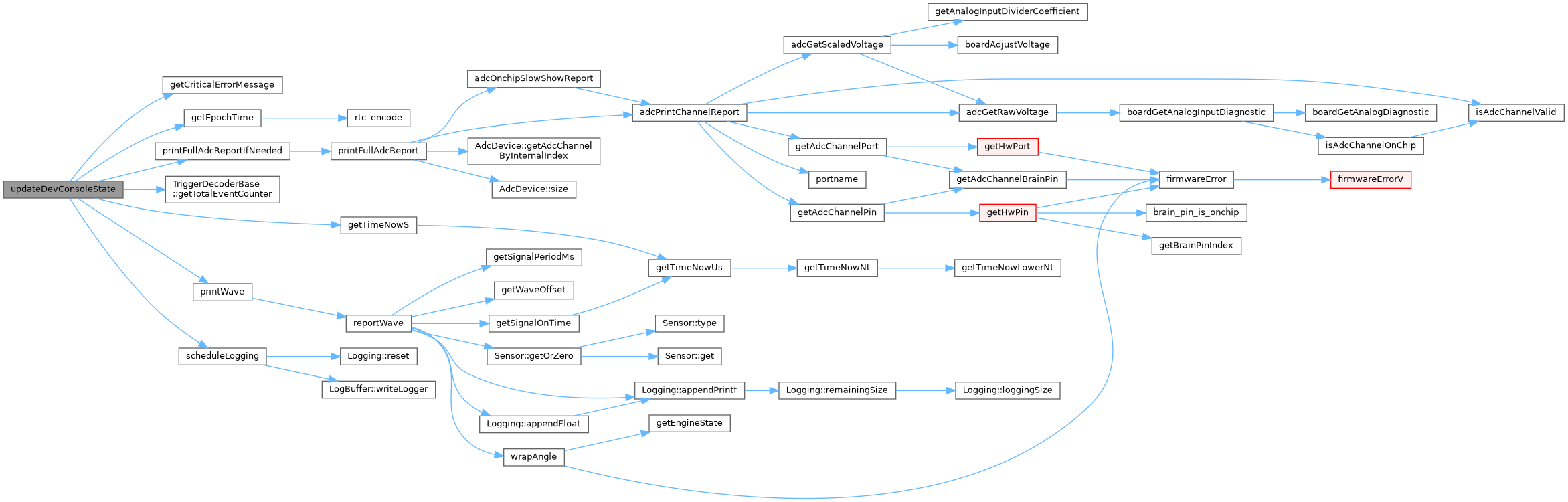
◆ updateDevConsoleState()
| void updateDevConsoleState | ( | ) |
Sends all pending data to rusEfi console.
This method is periodically invoked by the main loop todo: is this mostly dead code?
Definition at line 183 of file status_loop.cpp.
Referenced by runMainLoop().

◆ updateEgtSensors()
|
static |
Definition at line 432 of file status_loop.cpp.
Referenced by updateSensors().


◆ updateFlags()
|
static |
Definition at line 602 of file status_loop.cpp.
Referenced by updateTunerStudioState().


◆ updateFuelCorrections()
|
static |
Definition at line 568 of file status_loop.cpp.
Referenced by updateFuelInfo().

◆ updateFuelInfo()
|
static |
Definition at line 584 of file status_loop.cpp.
Referenced by updateTunerStudioState().


◆ updateFuelResults()
|
static |
Definition at line 572 of file status_loop.cpp.
Referenced by updateFuelInfo().


◆ updateFuelSensors()
|
static |
Definition at line 421 of file status_loop.cpp.
Referenced by updateSensors().


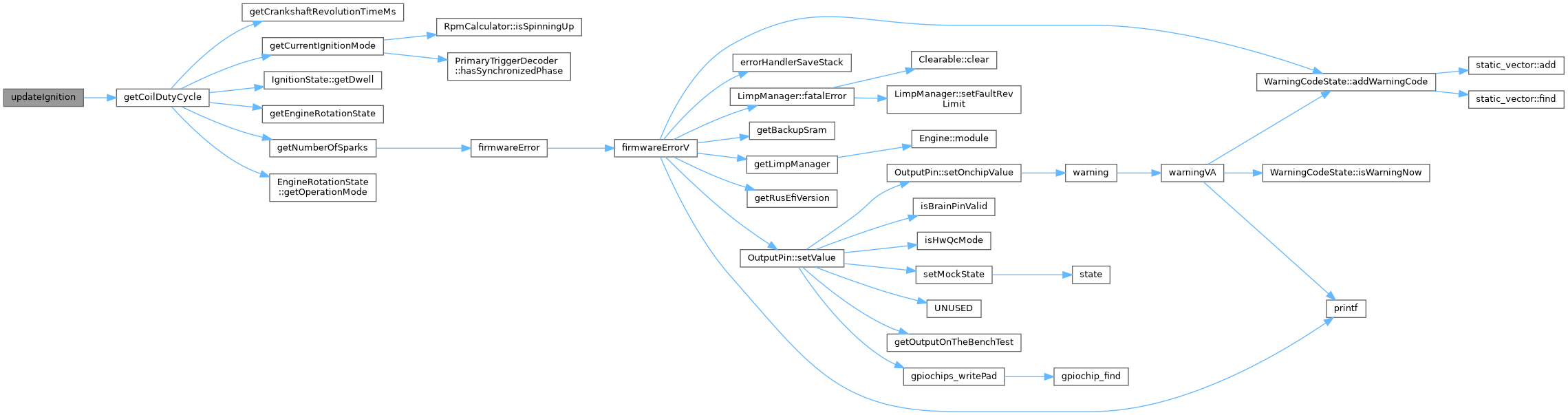
◆ updateIgnition()
|
static |
Definition at line 596 of file status_loop.cpp.
Referenced by updateTunerStudioState().

◆ updateLambda()
|
static |
Definition at line 405 of file status_loop.cpp.
Referenced by updateSensors().


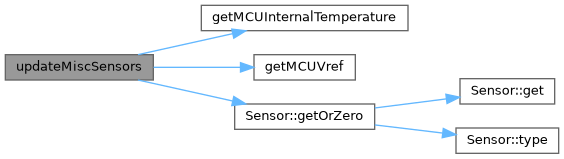
◆ updateMiscSensors()
|
static |
Definition at line 537 of file status_loop.cpp.
Referenced by updateSensors().

◆ updatePressures()
|
static |
Definition at line 517 of file status_loop.cpp.
Referenced by updateSensors().


◆ updateRawSensors()
|
static |
Definition at line 475 of file status_loop.cpp.
Referenced by updateSensors().


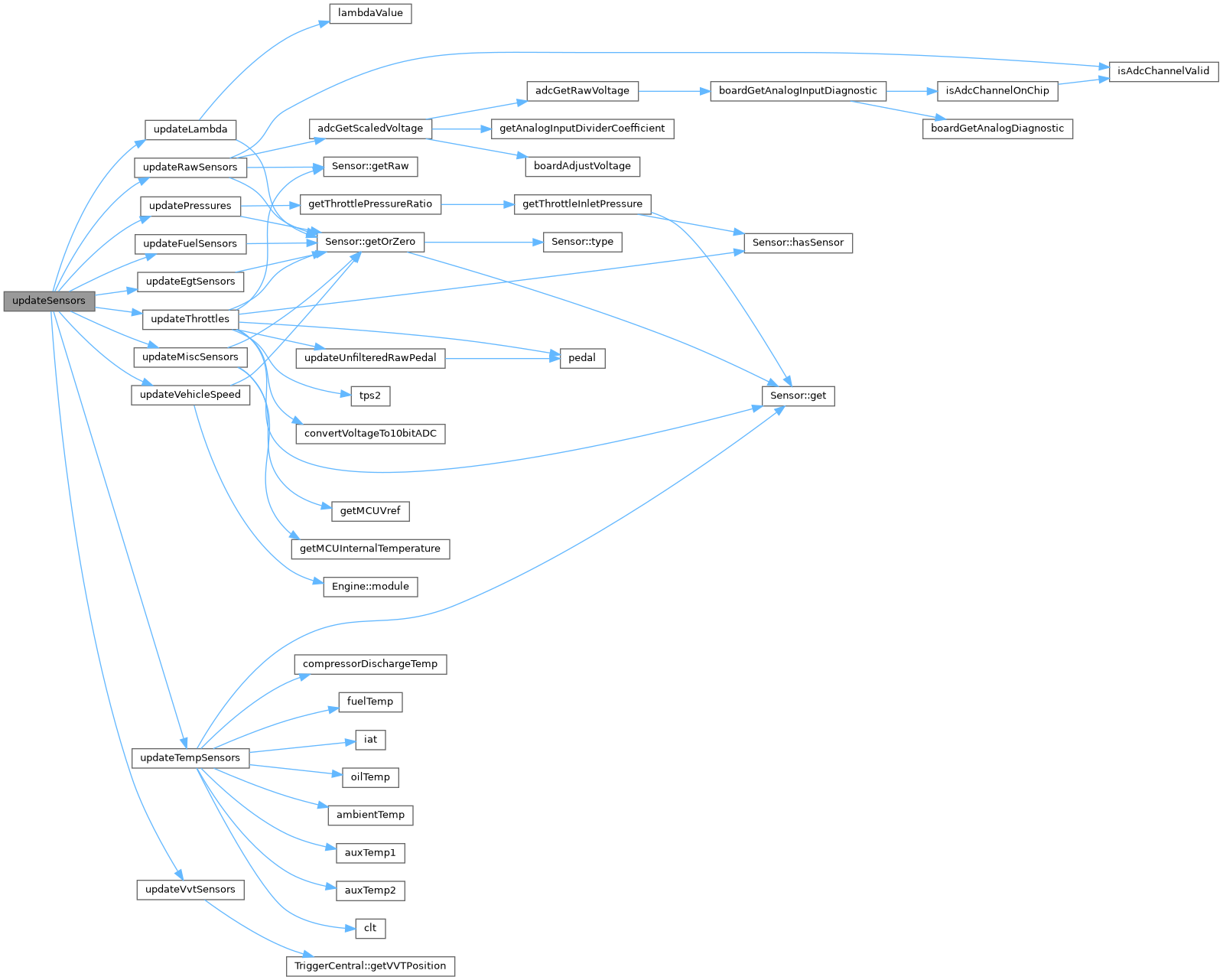
◆ updateSensors()
|
static |
Definition at line 555 of file status_loop.cpp.
Referenced by updateTunerStudioState().

◆ updateTempSensors()
|
static |
Definition at line 345 of file status_loop.cpp.
Referenced by updateSensors().

◆ updateThrottles()
|
static |
Definition at line 376 of file status_loop.cpp.
Referenced by updateSensors().


◆ updateTunerStudioState()
| void updateTunerStudioState | ( | ) |
Definition at line 627 of file status_loop.cpp.
Referenced by TunerStudio::cmdOutputChannels(), configureRusefiLuaHooks(), and MLG::writeSdLogLine().


◆ updateUnfilteredRawPedal()
| void updateUnfilteredRawPedal | ( | ) |
Definition at line 194 of file init_tps.cpp.
Referenced by updateThrottles().


◆ updateVehicleSpeed()
|
static |
Definition at line 453 of file status_loop.cpp.
Referenced by updateSensors().

◆ updateVvtSensors()
|
static |
Definition at line 443 of file status_loop.cpp.
Referenced by updateSensors().


Variable Documentation
◆ communicationsBlinkingTask
|
static |
Definition at line 328 of file status_loop.cpp.
Referenced by startStatusThreads().
◆ consoleByteArrived
|
extern |
Definition at line 47 of file console_io.cpp.
Referenced by onDataArrived().
◆ leds
|
static |
◆ logicAnalyzerBuffer
|
static |
Definition at line 173 of file status_loop.cpp.
◆ logicAnalyzerLogger
|
static |
Referenced by updateDevConsoleState().
◆ luaGaugeTypes
|
static |
Definition at line 464 of file status_loop.cpp.
Referenced by updateRawSensors().
◆ maxLockedDuration
|
extern |
Maximum time before requesting lock and releasing lock at the end of critical section
Definition at line 555 of file error_handling.cpp.
Referenced by updateTunerStudioState().
◆ maxTriggerReentrant
|
extern |
Definition at line 460 of file trigger_central.cpp.
Referenced by updateTunerStudioState().
◆ printVersionTimer
|
static |
Time when the firmware version was last reported TODO: implement a request/response instead of just constantly sending this out
Definition at line 93 of file status_loop.cpp.
Referenced by printOverallStatus().
◆ waveChart
|
extern |
Definition at line 68 of file engine_sniffer.cpp.
Referenced by printOverallStatus(), and Engine::resetEngineSnifferIfInTestMode().