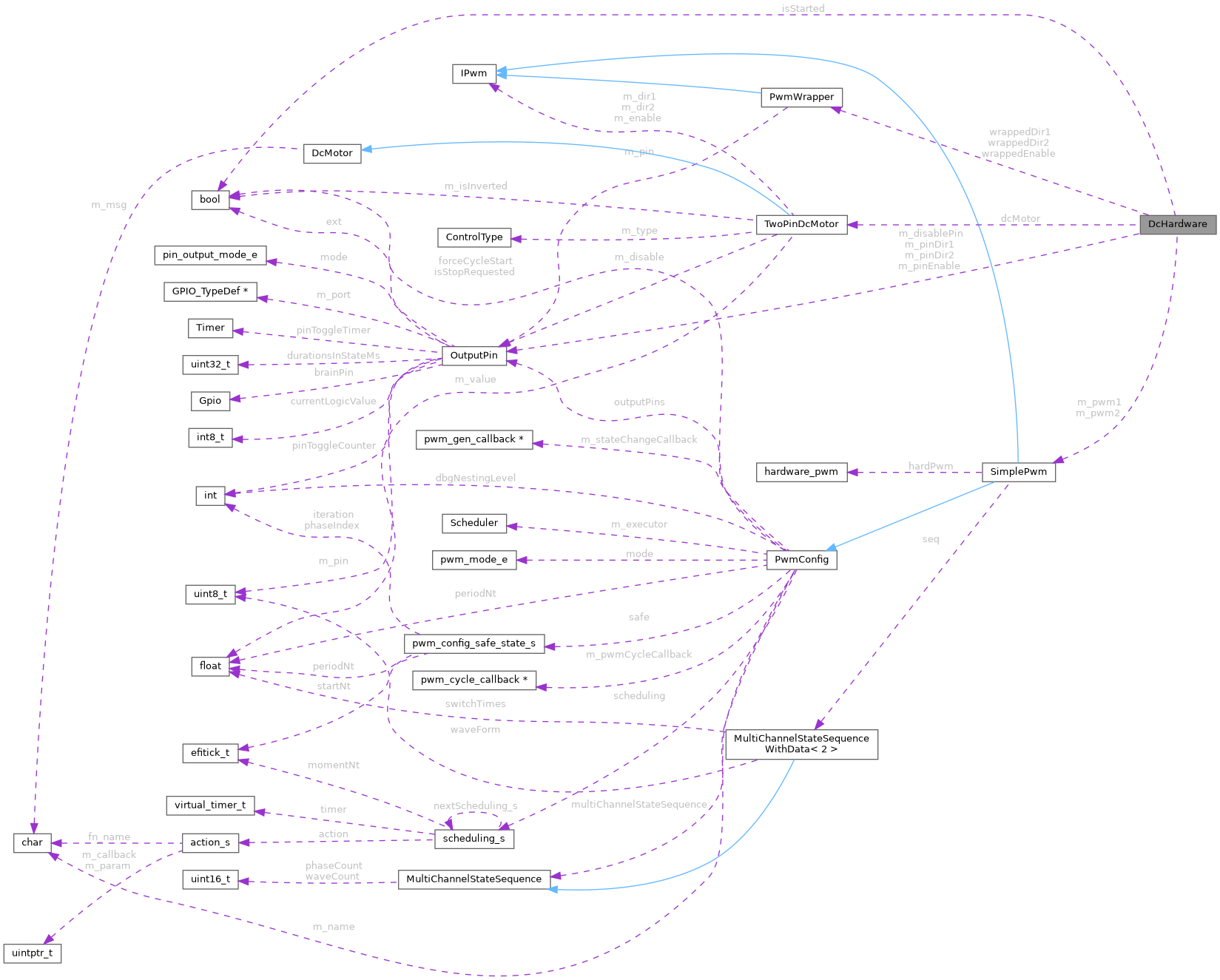
#include <dc_motors.h>
Public Member Functions | |
| DcHardware () | |
| void | start (bool useTwoWires, brain_pin_e pinEnable, brain_pin_e pinDir1, brain_pin_e pinDir2, const char *disPinMsg, brain_pin_e pinDisable, bool isInverted, Scheduler *executor, int frequency) |
| void | setFrequency (int frequency) |
| const char * | msg () |
| void | stop () |
Data Fields | |
| TwoPinDcMotor | dcMotor |
Private Attributes | |
| OutputPin | m_pinEnable |
| OutputPin | m_pinDir1 |
| OutputPin | m_pinDir2 |
| OutputPin | m_disablePin |
| PwmWrapper | wrappedEnable {m_pinEnable} |
| PwmWrapper | wrappedDir1 {m_pinDir1} |
| PwmWrapper | wrappedDir2 {m_pinDir2} |
| SimplePwm | m_pwm1 |
| SimplePwm | m_pwm2 |
| bool | isStarted = false |
Detailed Description
Definition at line 34 of file dc_motors.h.
Constructor & Destructor Documentation
◆ DcHardware()
|
inline |
Definition at line 51 of file dc_motors.h.
Member Function Documentation
◆ msg()
|
inline |
Definition at line 70 of file dc_motors.h.
Referenced by showDcMotorInfo(), and updateTunerStudioState().


◆ setFrequency()
|
inline |
Definition at line 65 of file dc_motors.h.
Referenced by setDcMotorFrequency().


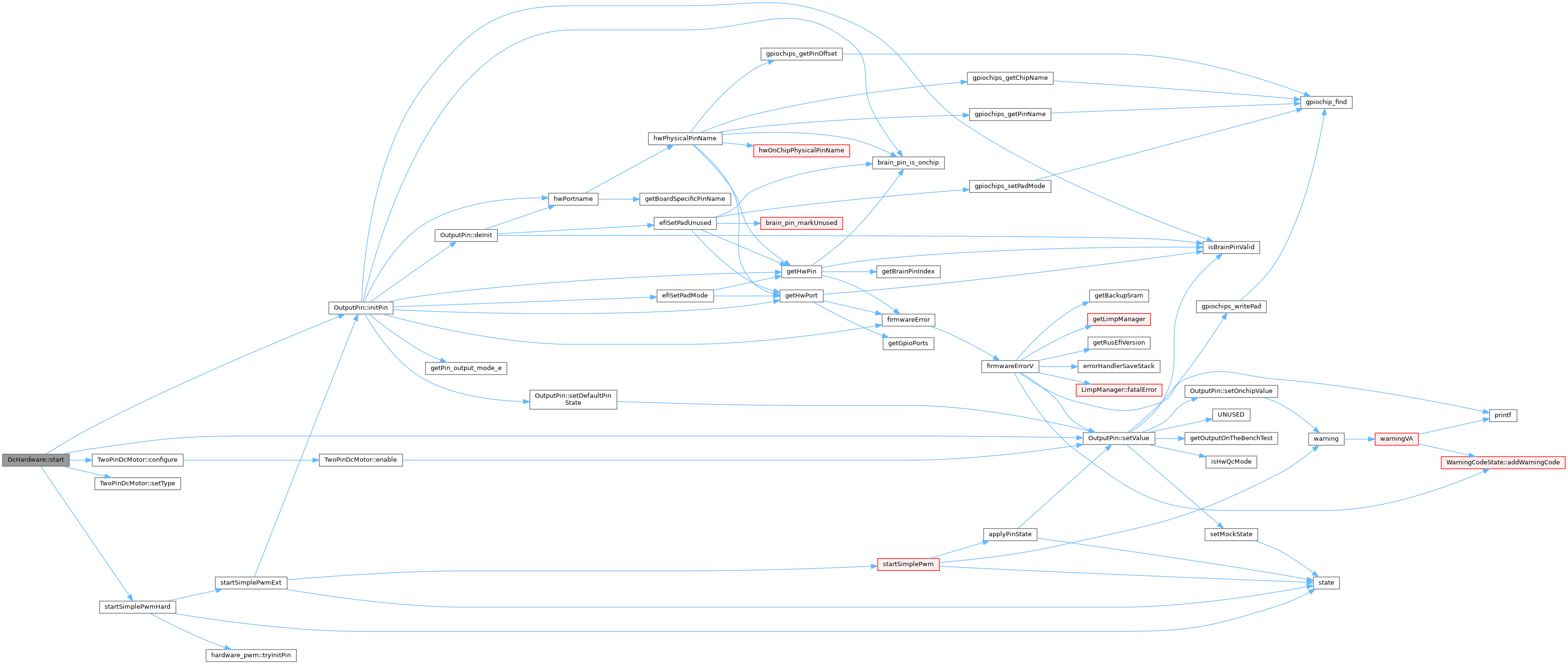
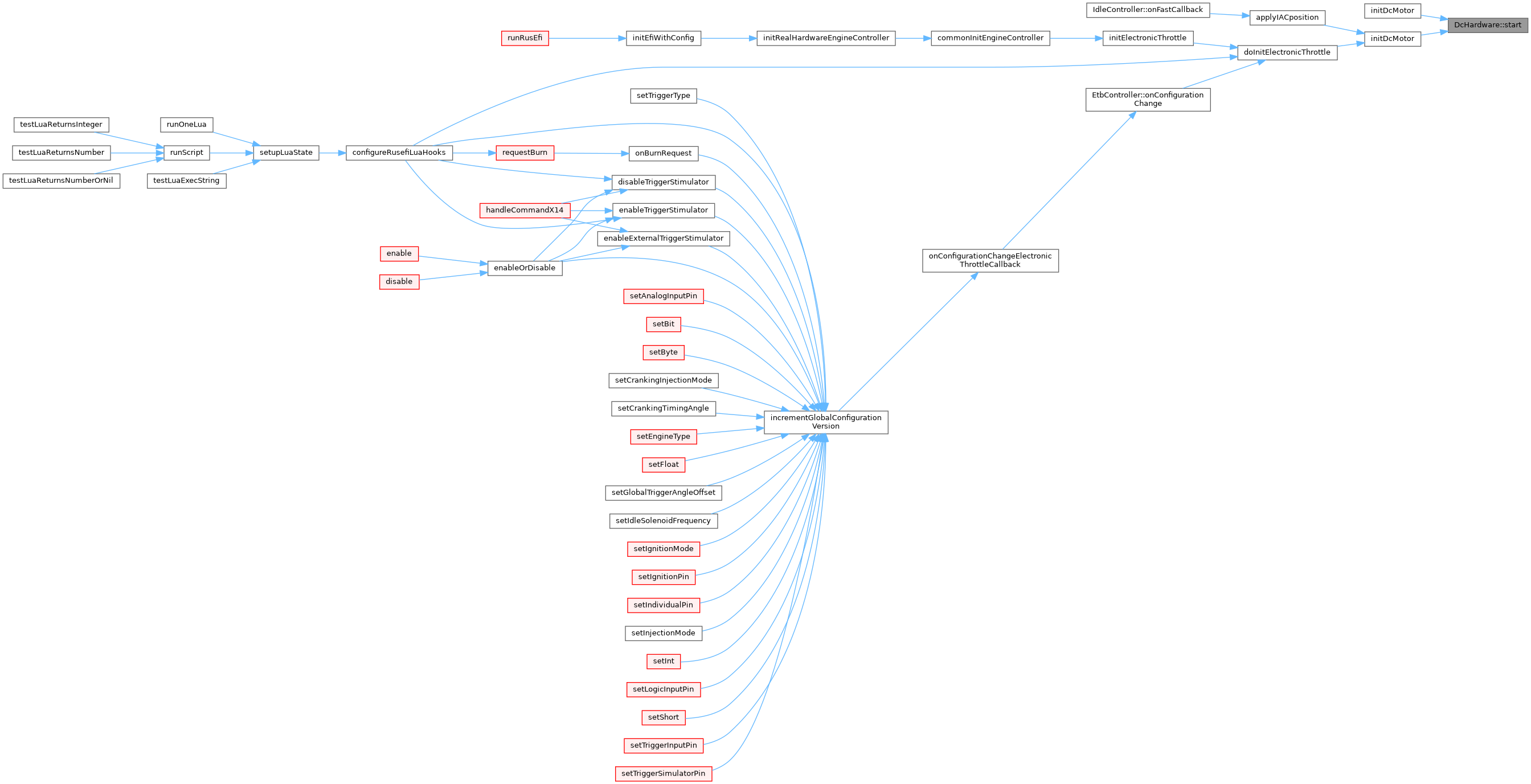
◆ start()
| void DcHardware::start | ( | bool | useTwoWires, |
| brain_pin_e | pinEnable, | ||
| brain_pin_e | pinDir1, | ||
| brain_pin_e | pinDir2, | ||
| const char * | disPinMsg, | ||
| brain_pin_e | pinDisable, | ||
| bool | isInverted, | ||
| Scheduler * | executor, | ||
| int | frequency | ||
| ) |
Definition at line 12 of file dc_motors.cpp.
Referenced by initDcMotor(), and initDcMotor().
◆ stop()
|
inline |
Definition at line 74 of file dc_motors.h.
Field Documentation
◆ dcMotor
| TwoPinDcMotor DcHardware::dcMotor |
Definition at line 63 of file dc_motors.h.
Referenced by msg(), setDcMotorDuty(), showDcMotorInfo(), start(), and updateTunerStudioState().
◆ isStarted
|
private |
Definition at line 48 of file dc_motors.h.
Referenced by start().
◆ m_disablePin
|
private |
Definition at line 39 of file dc_motors.h.
Referenced by start().
◆ m_pinDir1
|
private |
Definition at line 37 of file dc_motors.h.
Referenced by start().
◆ m_pinDir2
|
private |
Definition at line 38 of file dc_motors.h.
Referenced by start().
◆ m_pinEnable
|
private |
Definition at line 36 of file dc_motors.h.
Referenced by start().
◆ m_pwm1
|
private |
Definition at line 45 of file dc_motors.h.
Referenced by setFrequency(), and start().
◆ m_pwm2
|
private |
Definition at line 46 of file dc_motors.h.
Referenced by setFrequency(), and start().
◆ wrappedDir1
|
private |
◆ wrappedDir2
|
private |
◆ wrappedEnable
|
private |
The documentation for this class was generated from the following files:
- controllers/actuators/dc_motors.h
- controllers/actuators/dc_motors.cpp