Functions | |
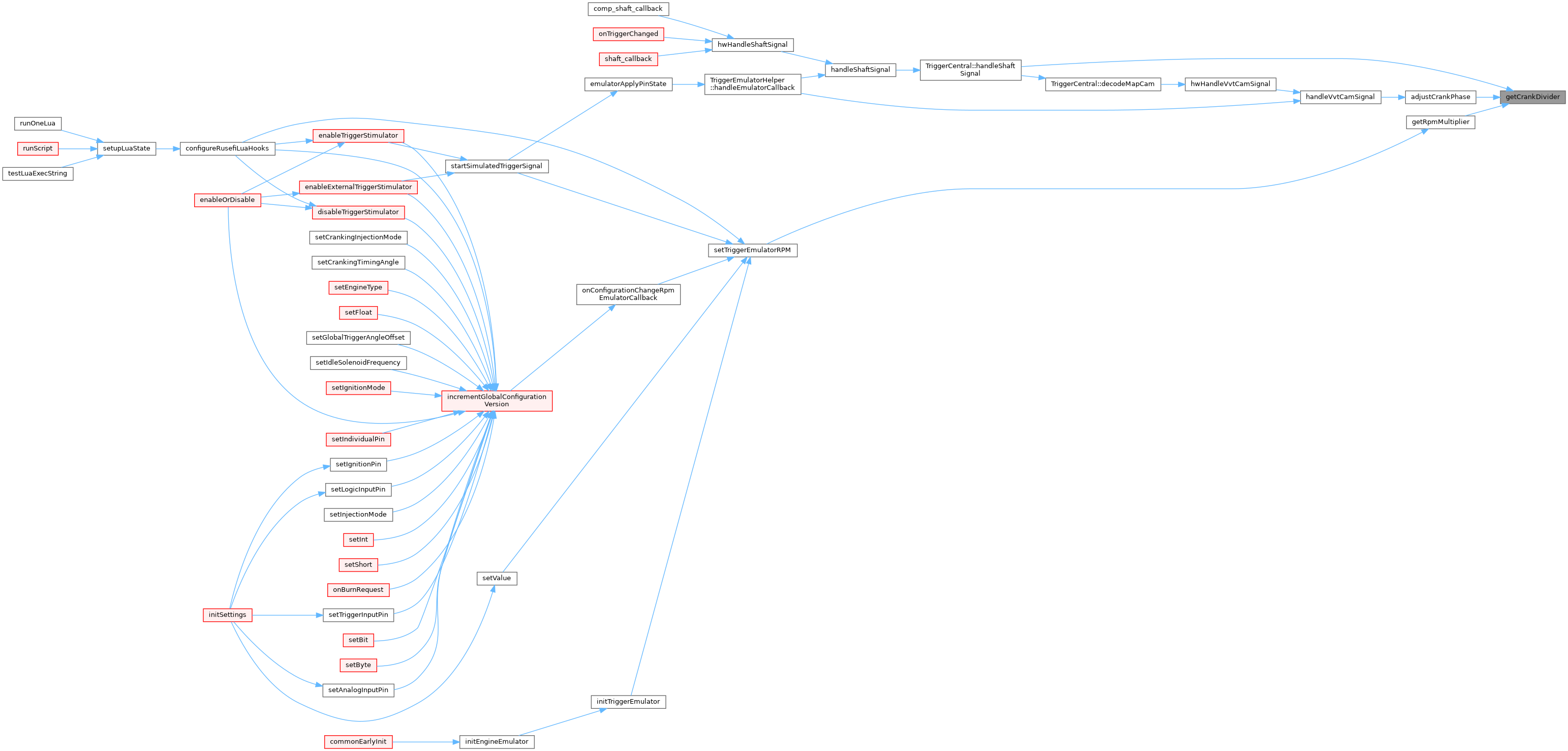
| int | getCrankDivider (operation_mode_e operationMode) |
| PUBLIC_API_WEAK bool | boardIsSpecialVvtDecoder (vvt_mode_e vvtMode) |
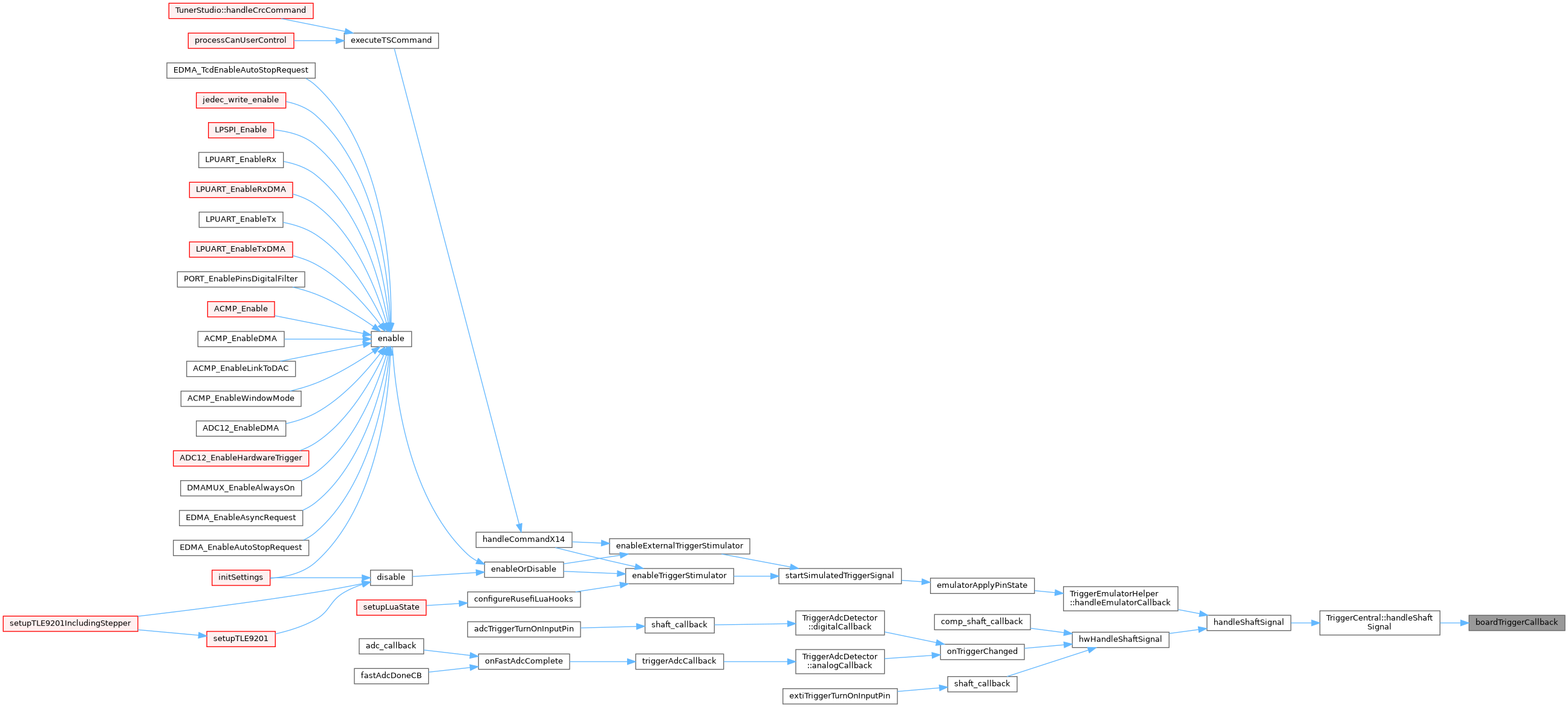
| PUBLIC_API_WEAK void | boardTriggerCallback (efitick_t timestamp, float currentPhase) |
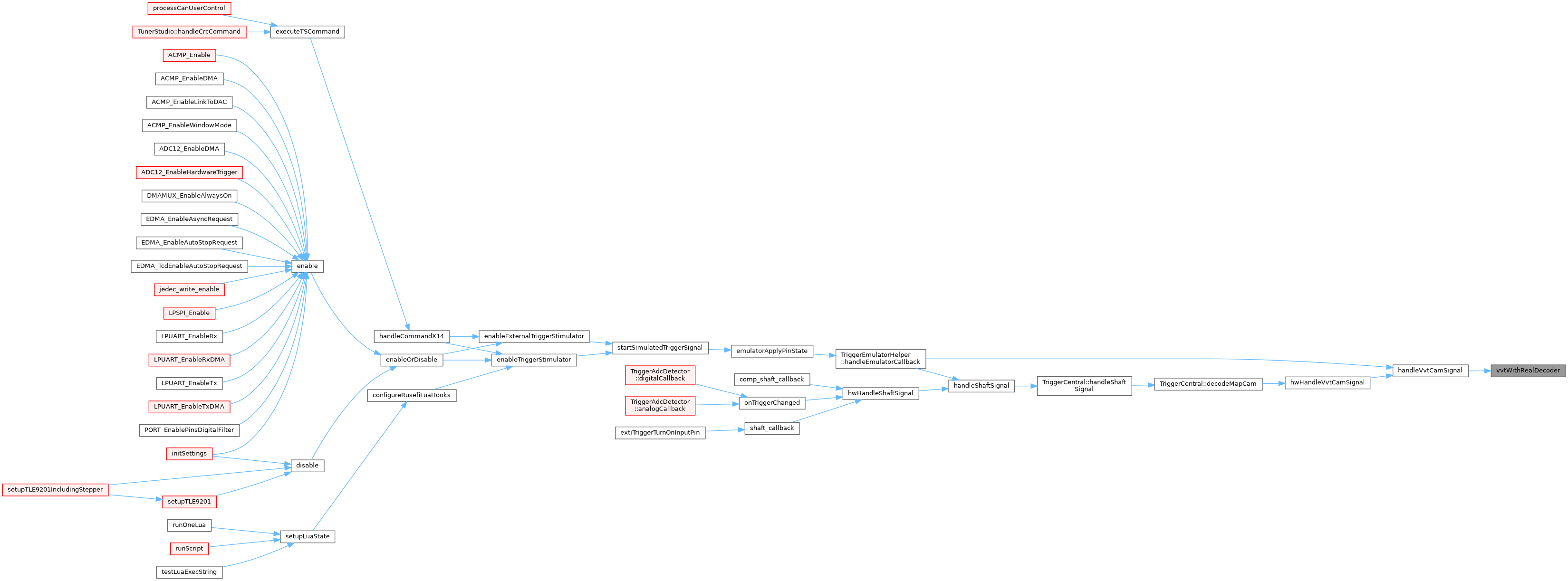
| static bool | vvtWithRealDecoder (vvt_mode_e vvtMode) |
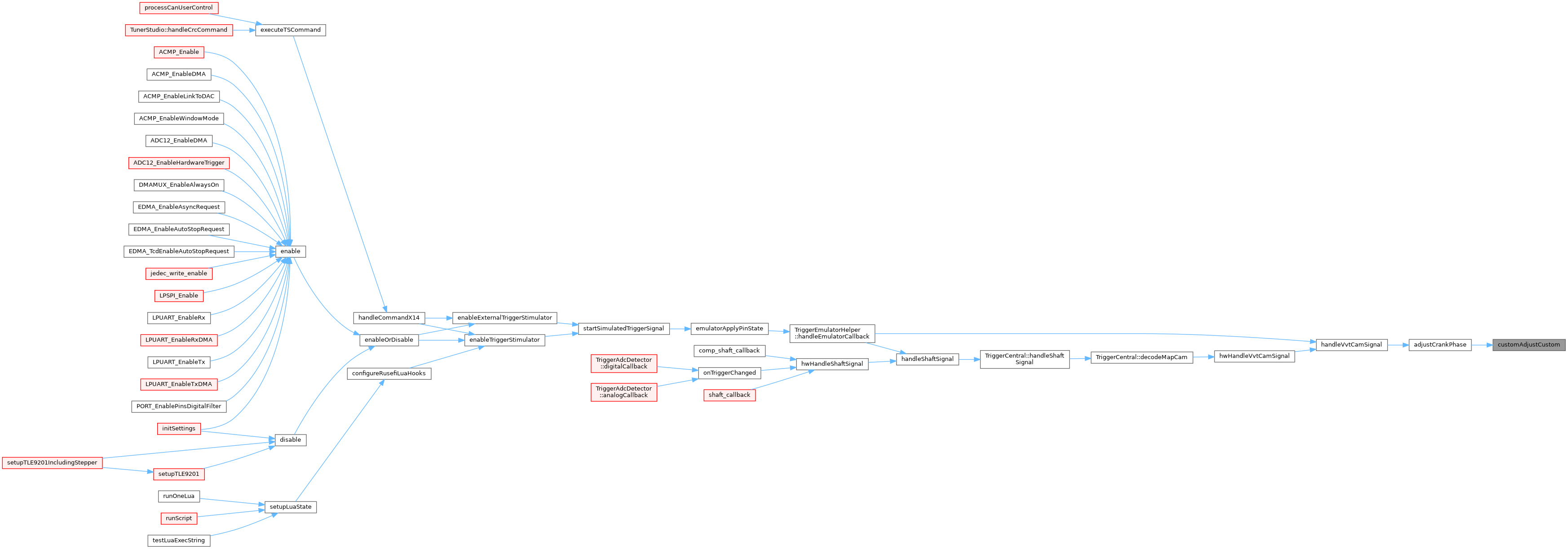
| PUBLIC_API_WEAK angle_t | customAdjustCustom (TriggerCentral *tc, vvt_mode_e vvtMode) |
| static angle_t | adjustCrankPhase (int camIndex) |
| static angle_t | wrapVvt (angle_t vvtPosition, int period) |
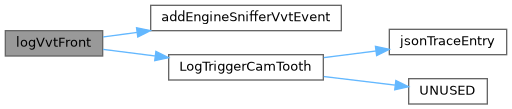
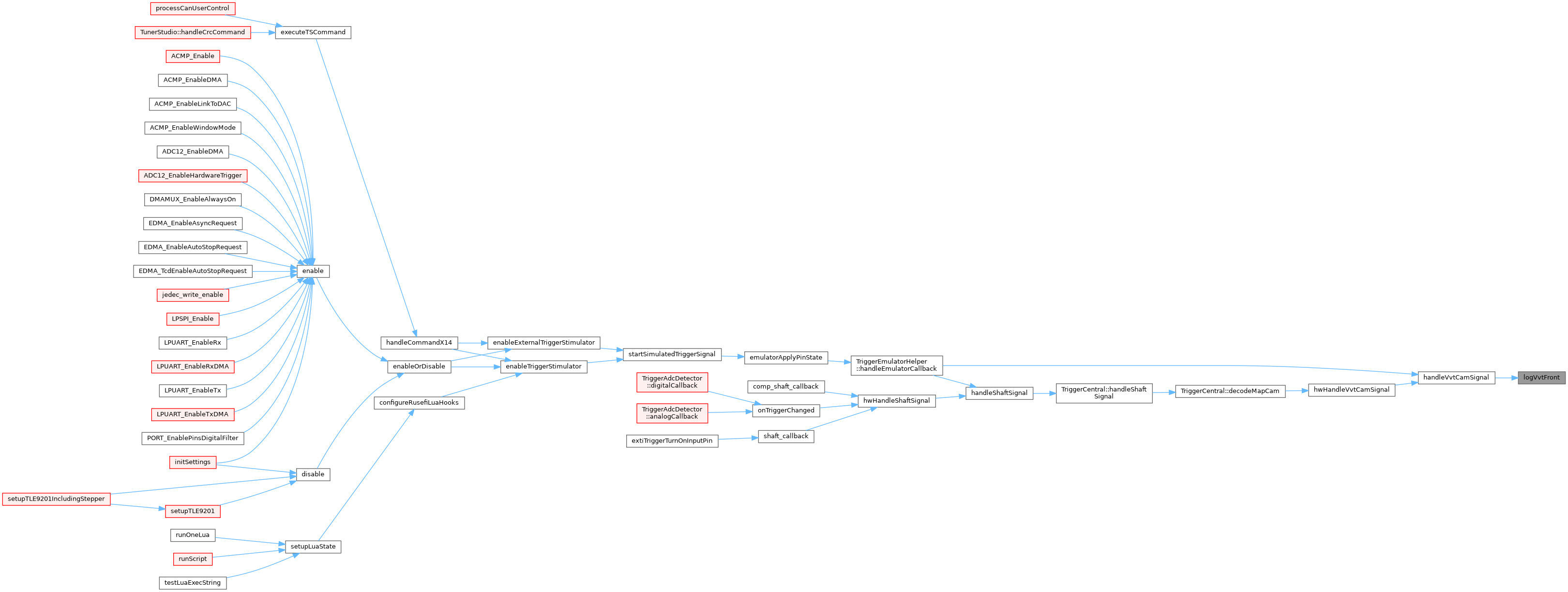
| static void | logVvtFront (bool useOnlyRise, bool isImportantFront, TriggerValue front, efitick_t nowNt, int index) |
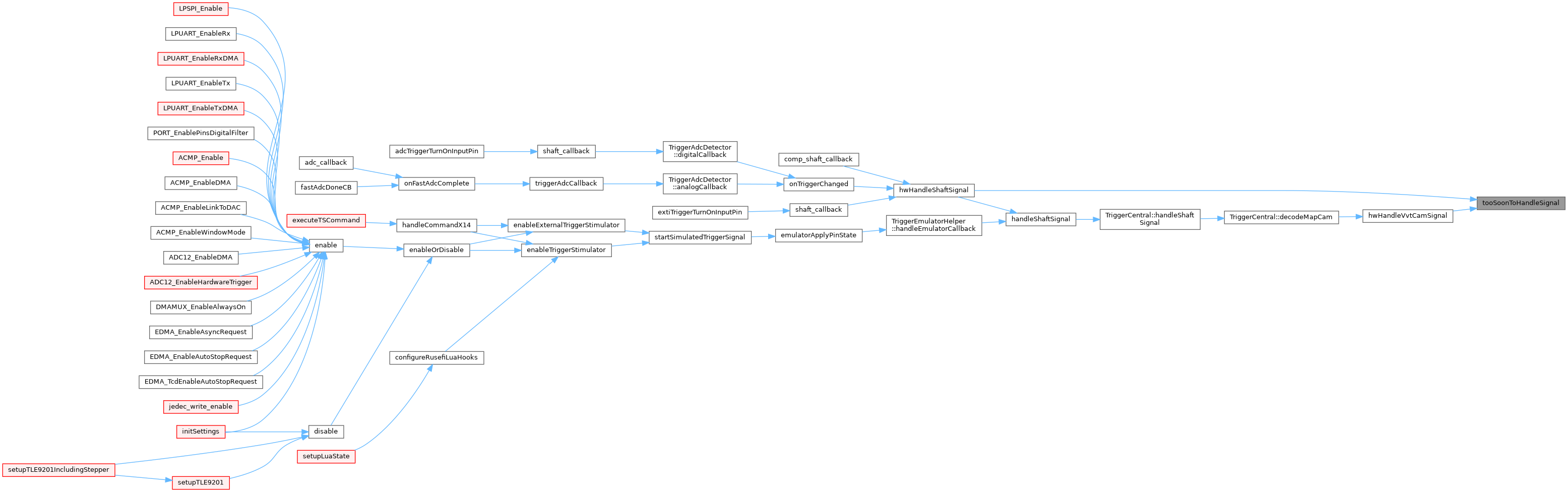
| static bool | tooSoonToHandleSignal () |
| void | hwHandleVvtCamSignal (bool isRising, efitick_t nowNt, int index) |
| void | hwHandleVvtCamSignal (TriggerValue front, efitick_t nowNt, int index) |
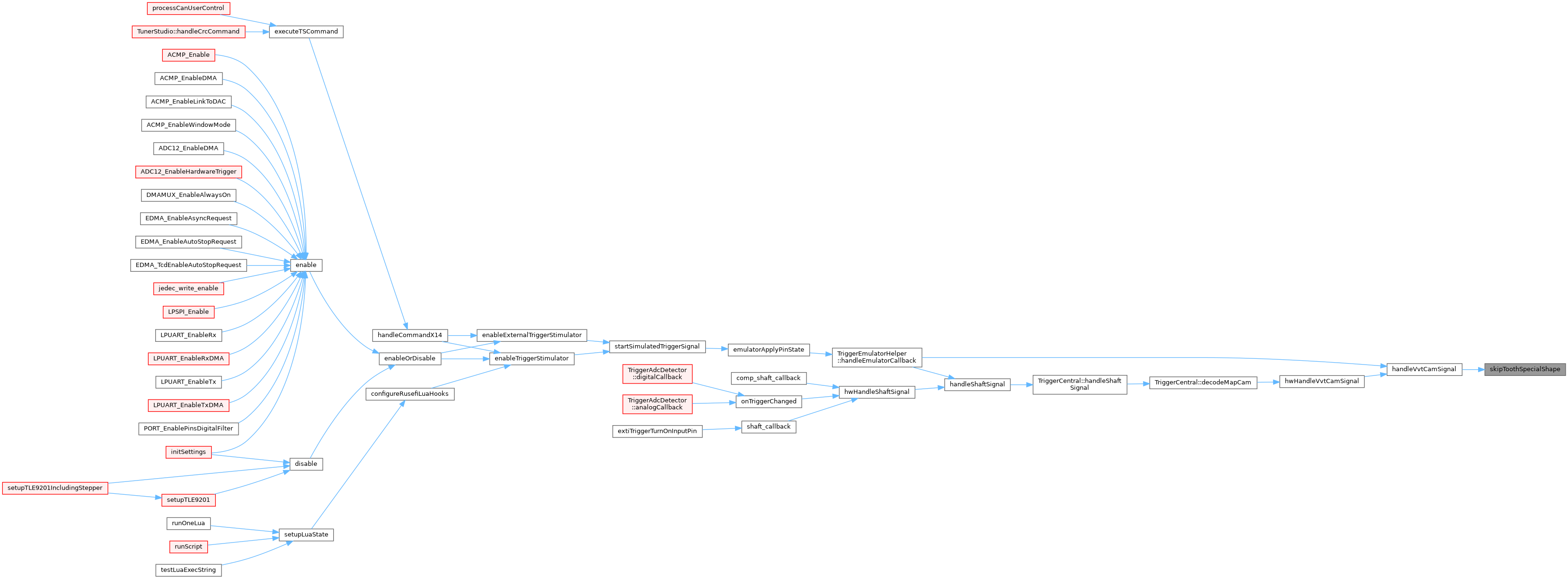
| PUBLIC_API_WEAK bool | skipToothSpecialShape (size_t index, vvt_mode_e vvtMode, angle_t currentPosition) |
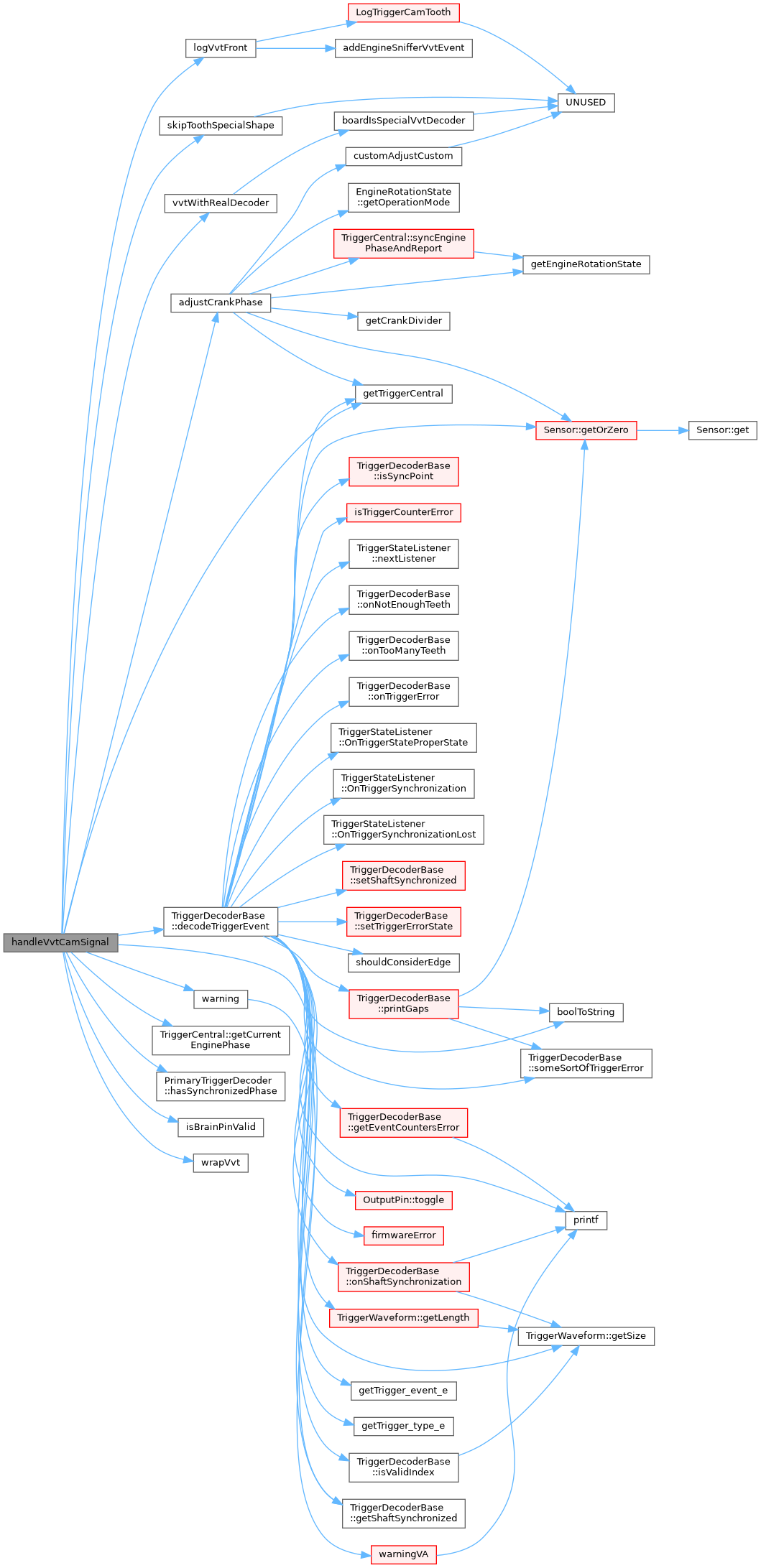
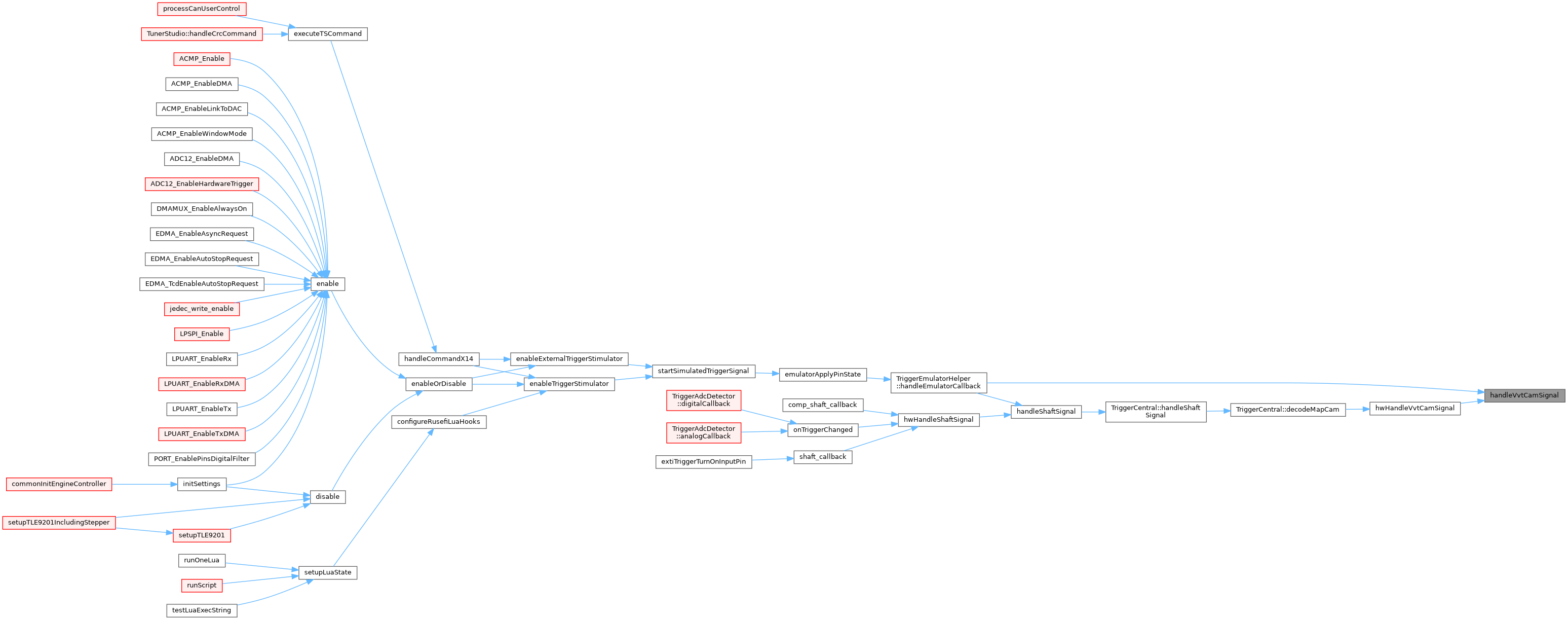
| void | handleVvtCamSignal (TriggerValue front, efitick_t nowNt, int index) |
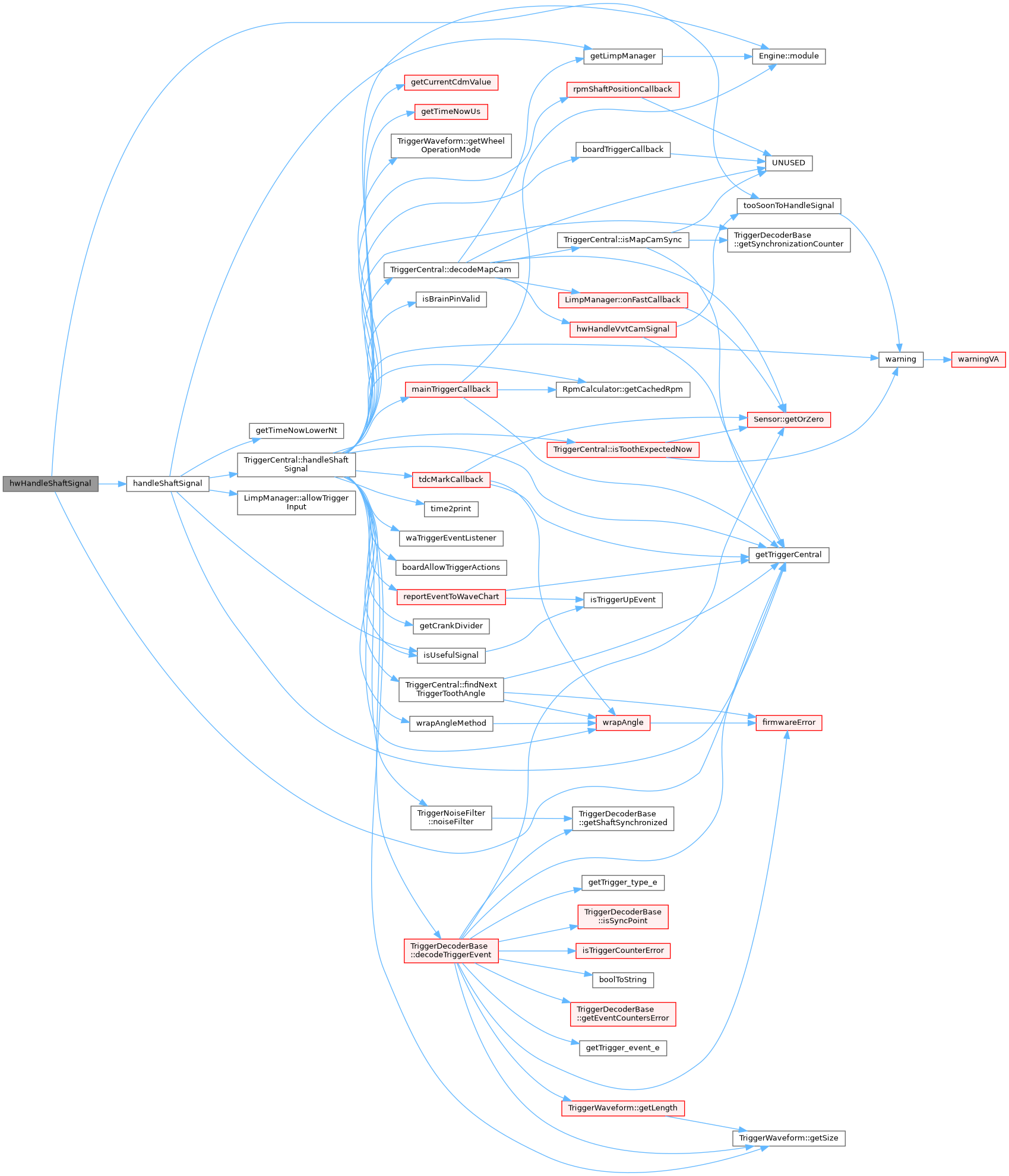
| void | hwHandleShaftSignal (int signalIndex, bool isRising, efitick_t timestamp) |
| void | handleShaftSignal (int signalIndex, bool isRising, efitick_t timestamp) |
| static void | reportEventToWaveChart (trigger_event_e ckpSignalType, int triggerEventIndex, bool addOppositeEvent) |
| PUBLIC_API_WEAK bool | boardAllowTriggerActions () |
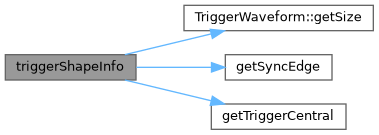
| static void | triggerShapeInfo () |
| void | triggerInfo (void) |
| static void | resetRunningTriggerCounters () |
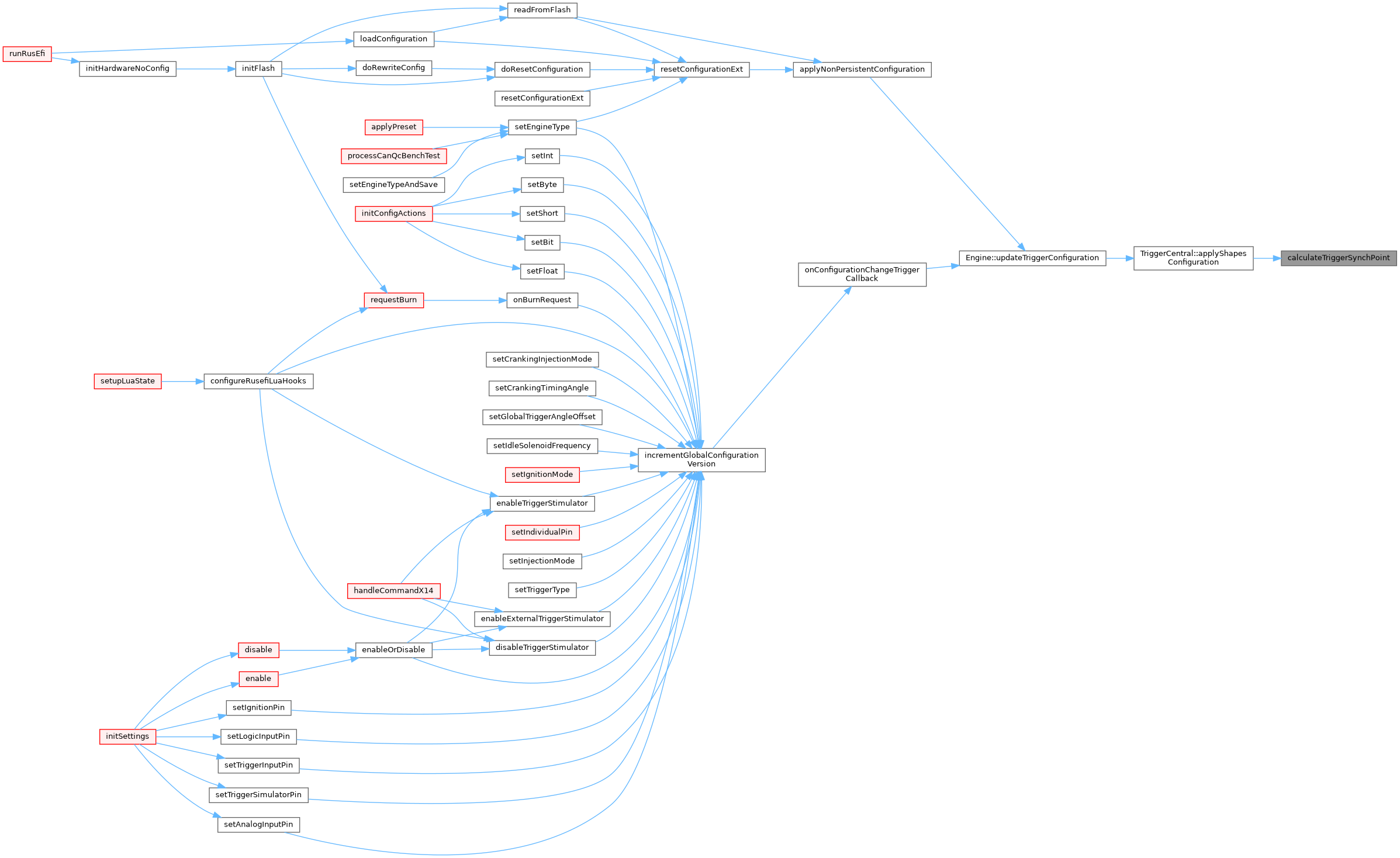
| void | onConfigurationChangeTriggerCallback () |
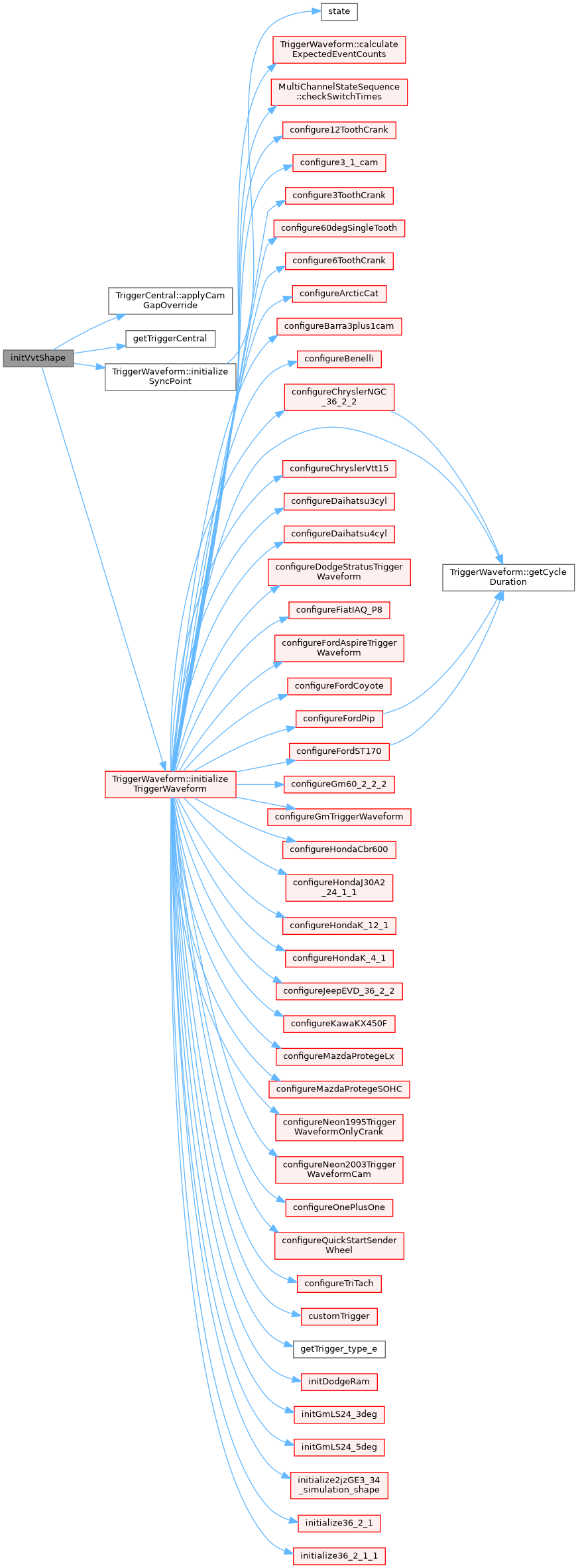
| static void | initVvtShape (int camIndex, TriggerWaveform &shape, const TriggerConfiguration &p_config, TriggerDecoderBase &initState) |
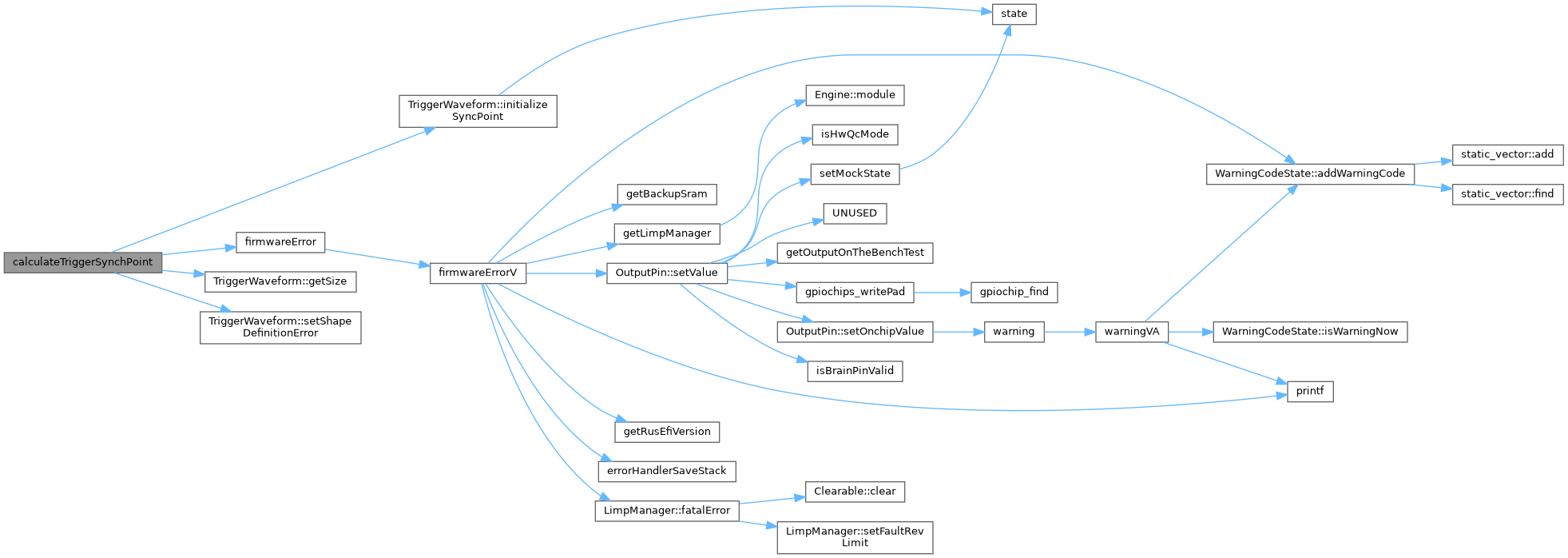
| static void | calculateTriggerSynchPoint (const PrimaryTriggerConfiguration &primaryTriggerConfiguration, TriggerWaveform &shape, TriggerDecoderBase &initState) |
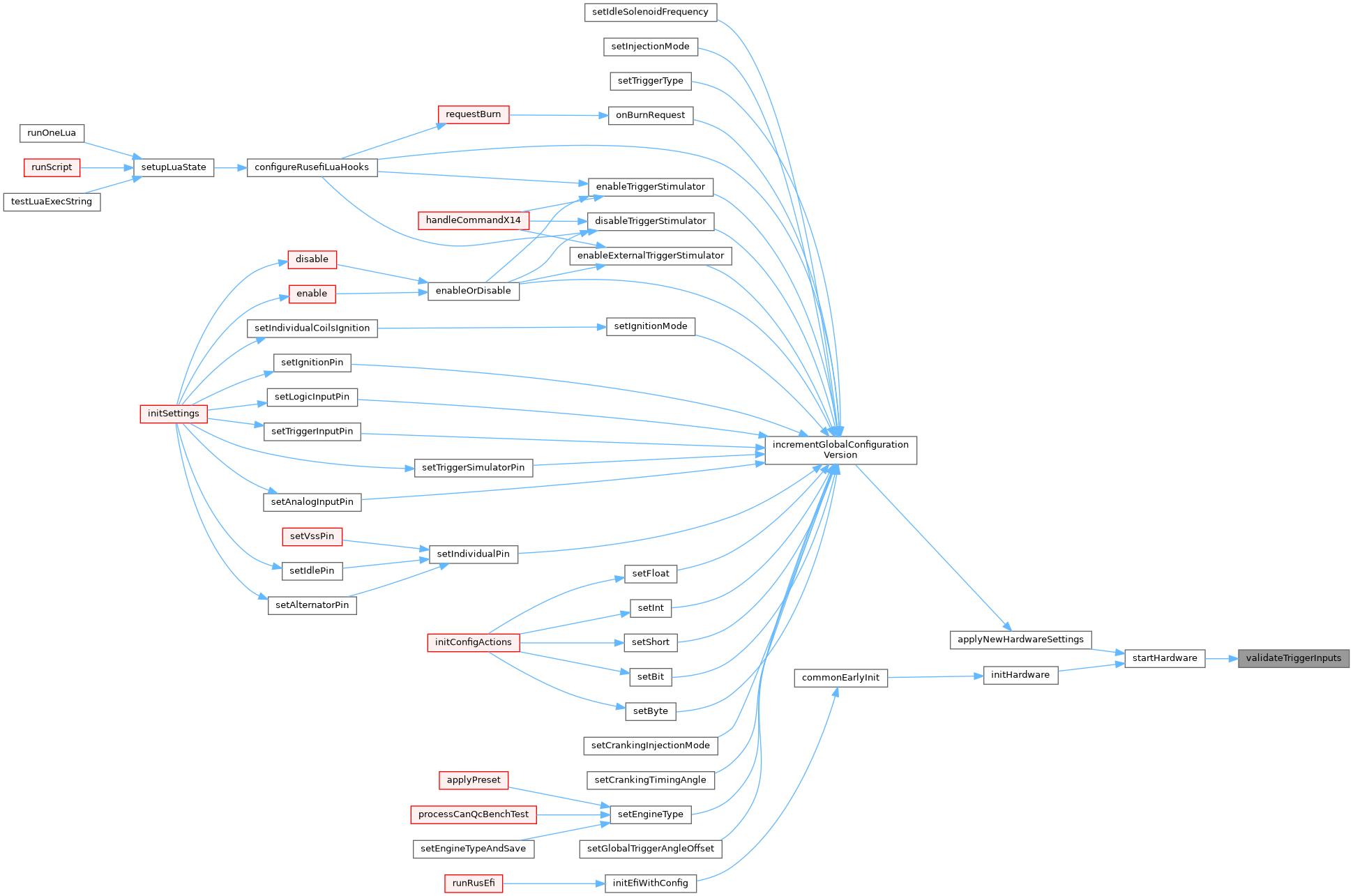
| void | validateTriggerInputs () |
| void | initTriggerCentral () |
Variables | |
| WaveChart | waveChart |
| int | triggerReentrant = 0 |
| int | maxTriggerReentrant = 0 |
| uint32_t | triggerDuration |
| uint32_t | triggerMaxDuration = 0 |
| static const int | wheelIndeces [4] = { 0, 0, 1, 1} |
| float | mapAtAngle [200] |
| PwmConfig | triggerEmulatorSignals [NUM_EMULATOR_CHANNELS] |
| TriggerDecoderBase | initState ("init") |
Function Documentation
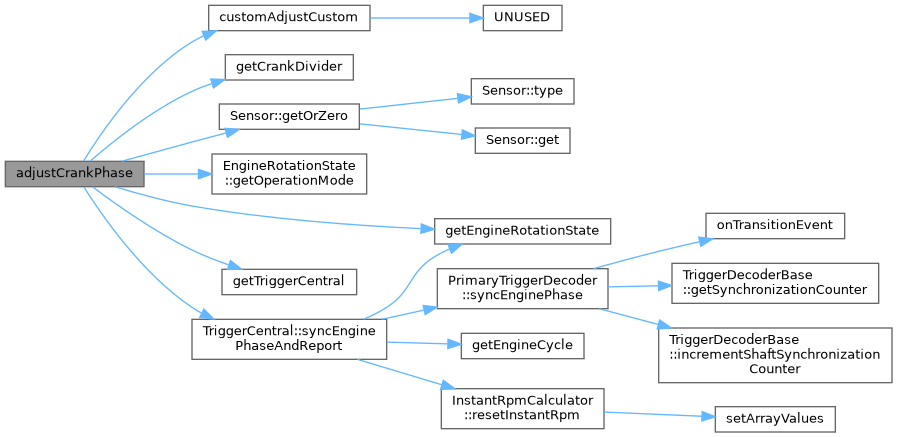
◆ adjustCrankPhase()
|
static |
Definition at line 155 of file trigger_central.cpp.
Referenced by handleVvtCamSignal().
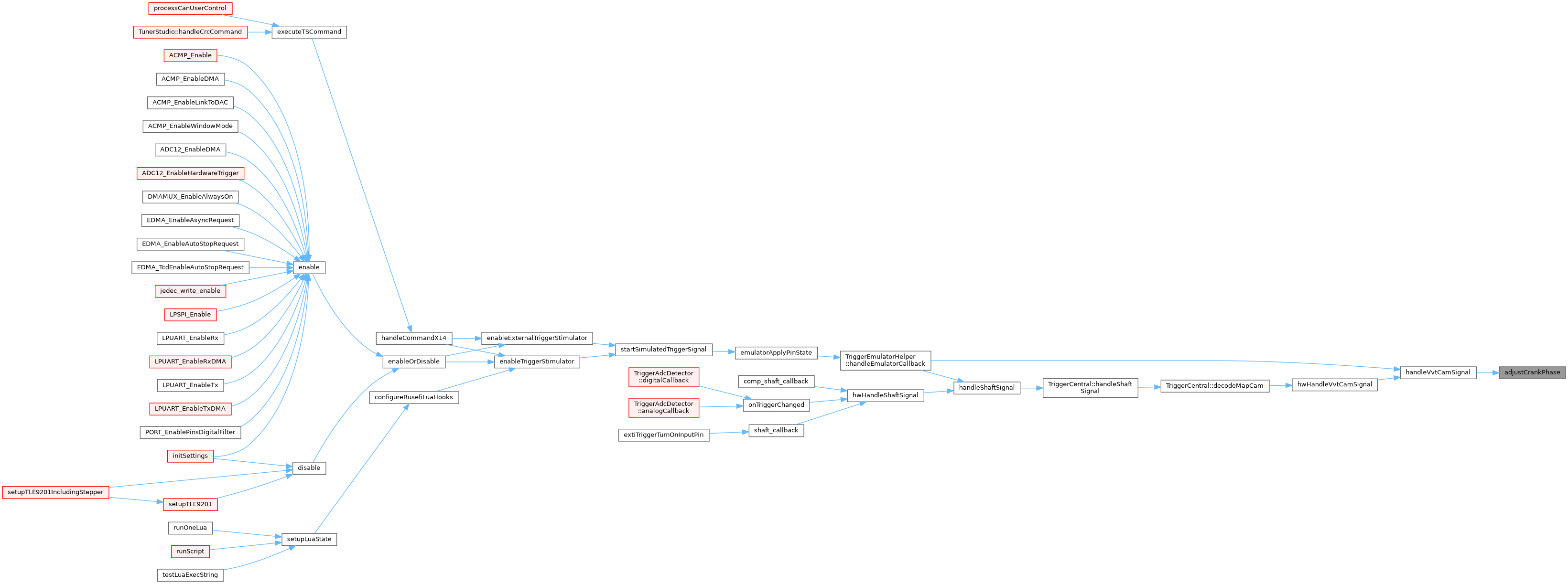
◆ boardAllowTriggerActions()
| PUBLIC_API_WEAK bool boardAllowTriggerActions | ( | ) |
Definition at line 788 of file trigger_central.cpp.
Referenced by TriggerCentral::handleShaftSignal().
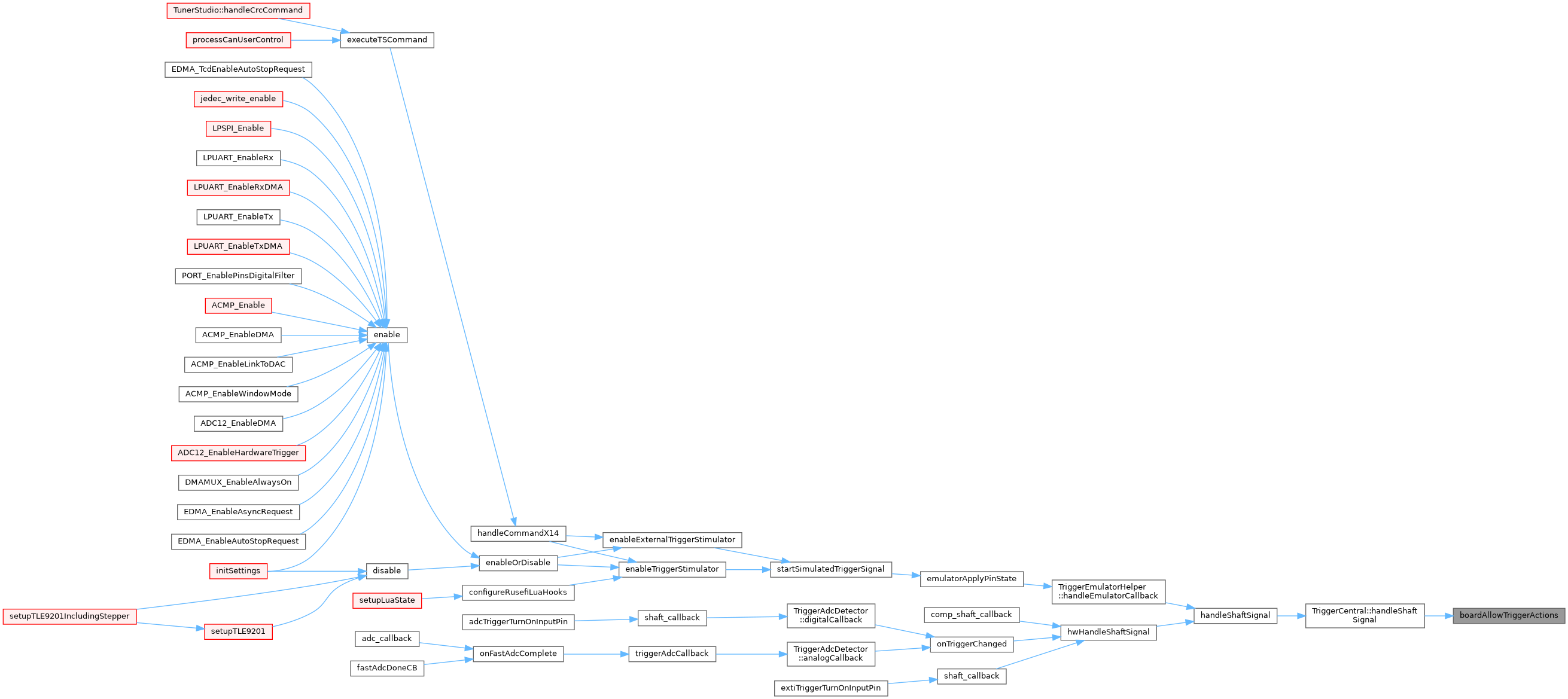
◆ boardIsSpecialVvtDecoder()
| PUBLIC_API_WEAK bool boardIsSpecialVvtDecoder | ( | vvt_mode_e | vvtMode | ) |
Definition at line 119 of file trigger_central.cpp.
Referenced by vvtWithRealDecoder().

◆ boardTriggerCallback()
| PUBLIC_API_WEAK void boardTriggerCallback | ( | efitick_t | timestamp, |
| float | currentPhase | ||
| ) |
Definition at line 125 of file trigger_central.cpp.
Referenced by TriggerCentral::handleShaftSignal().

◆ calculateTriggerSynchPoint()
|
static |
Calculate 'shape.triggerShapeSynchPointIndex' value using 'TriggerDecoderBase *state'
Definition at line 1131 of file trigger_central.cpp.
Referenced by TriggerCentral::applyShapesConfiguration().
◆ customAdjustCustom()
| PUBLIC_API_WEAK angle_t customAdjustCustom | ( | TriggerCentral * | tc, |
| vvt_mode_e | vvtMode | ||
| ) |
Definition at line 148 of file trigger_central.cpp.
Referenced by adjustCrankPhase().

◆ getCrankDivider()
| int getCrankDivider | ( | operation_mode_e | operationMode | ) |
todo: why is this method NOT reciprocal to getRpmMultiplier?!
wow even while we explicitly handle all enumerations in the switch above we still need a return statement due to https://stackoverflow.com/questions/34112483/gcc-how-best-to-handle-warning-about-unreachable-end-of-function-after-switch
Definition at line 92 of file trigger_central.cpp.
Referenced by adjustCrankPhase(), getRpmMultiplier(), and TriggerCentral::handleShaftSignal().
◆ handleShaftSignal()
| void handleShaftSignal | ( | int | signalIndex, |
| bool | isRising, | ||
| efitick_t | timestamp | ||
| ) |
no need to process VR falls further
Definition at line 485 of file trigger_central.cpp.
Referenced by TriggerEmulatorHelper::handleEmulatorCallback(), and hwHandleShaftSignal().


◆ handleVvtCamSignal()
| void handleVvtCamSignal | ( | TriggerValue | front, |
| efitick_t | nowNt, | ||
| int | index | ||
| ) |
we prefer not to have VVT sync right at trigger sync so that we do not have phase detection error if things happen a bit in wrong order due to belt flex or else https://github.com/rusefi/rusefi/issues/3269
Definition at line 323 of file trigger_central.cpp.
Referenced by TriggerEmulatorHelper::handleEmulatorCallback(), and hwHandleVvtCamSignal().
◆ hwHandleShaftSignal()
| void hwHandleShaftSignal | ( | int | signalIndex, |
| bool | isRising, | ||
| efitick_t | timestamp | ||
| ) |
This function is called by all "hardware" trigger inputs:
- Hardware triggers
- Trigger replay from CSV (unit tests)
Definition at line 469 of file trigger_central.cpp.
Referenced by comp_shaft_callback(), onTriggerChanged(), and shaft_callback().

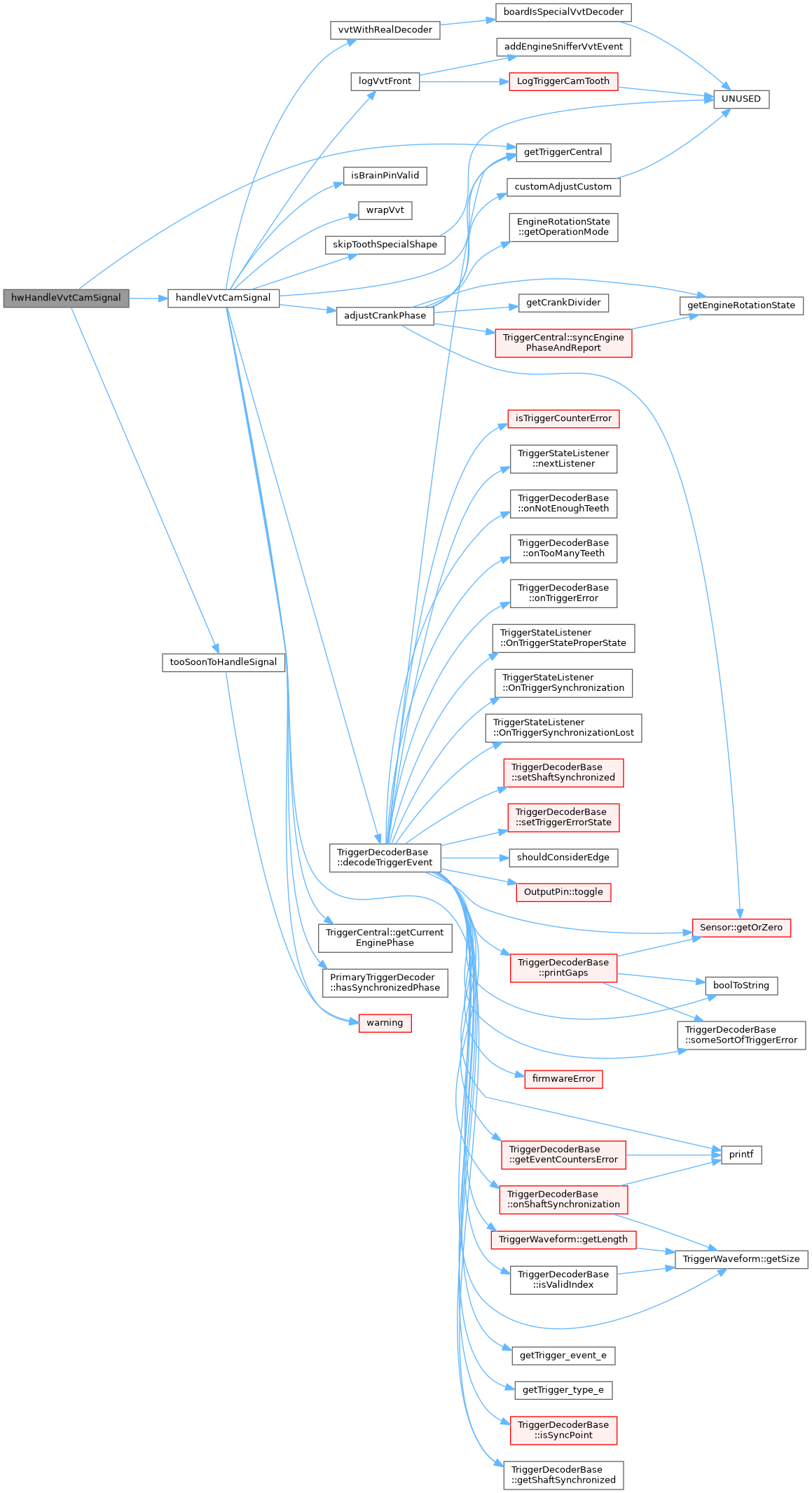
◆ hwHandleVvtCamSignal() [1/2]
| void hwHandleVvtCamSignal | ( | bool | isRising, |
| efitick_t | nowNt, | ||
| int | index | ||
| ) |
This function is called by all "hardware" trigger inputs:
- Hardware triggers
- Trigger replay from CSV (unit tests)
Definition at line 272 of file trigger_central.cpp.
Referenced by cam_callback(), comp_cam_callback(), and hwHandleVvtCamSignal().

◆ hwHandleVvtCamSignal() [2/2]
| void hwHandleVvtCamSignal | ( | TriggerValue | front, |
| efitick_t | nowNt, | ||
| int | index | ||
| ) |
Definition at line 284 of file trigger_central.cpp.
Referenced by TriggerCentral::decodeMapCam().
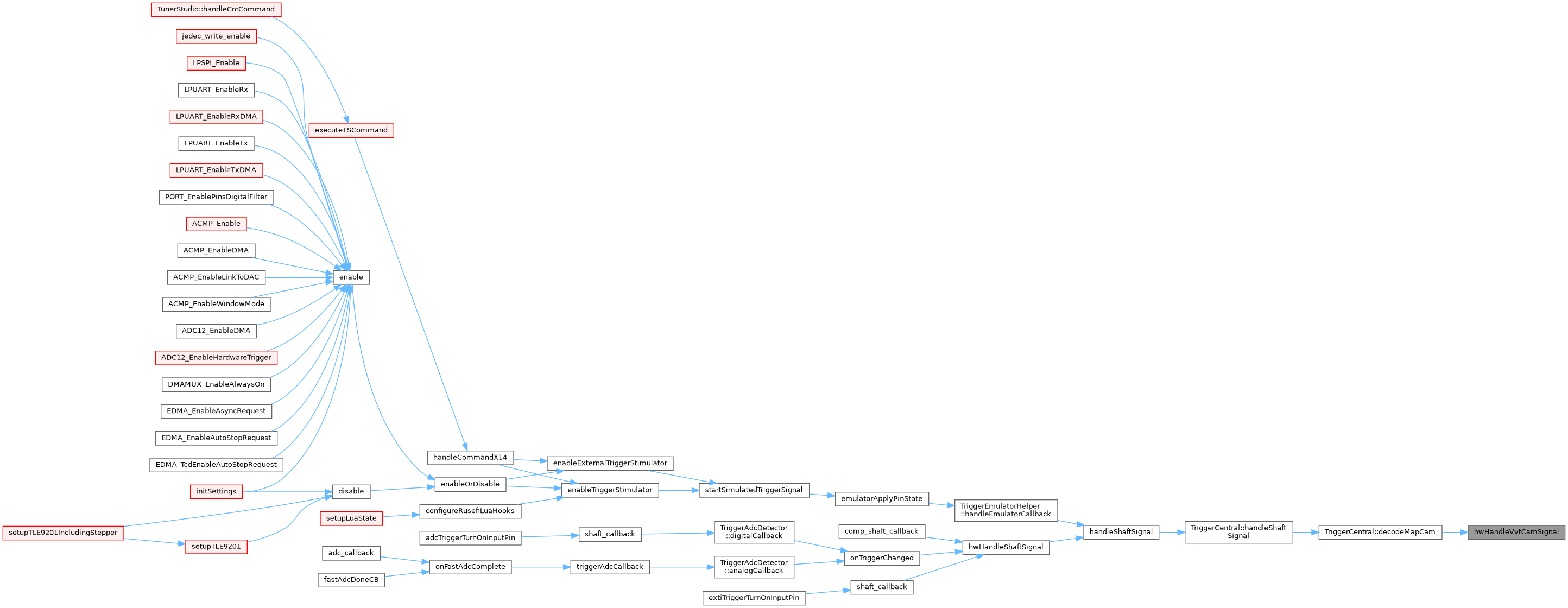
◆ initTriggerCentral()
| void initTriggerCentral | ( | ) |
Definition at line 1275 of file trigger_central.cpp.
Referenced by commonEarlyInit().

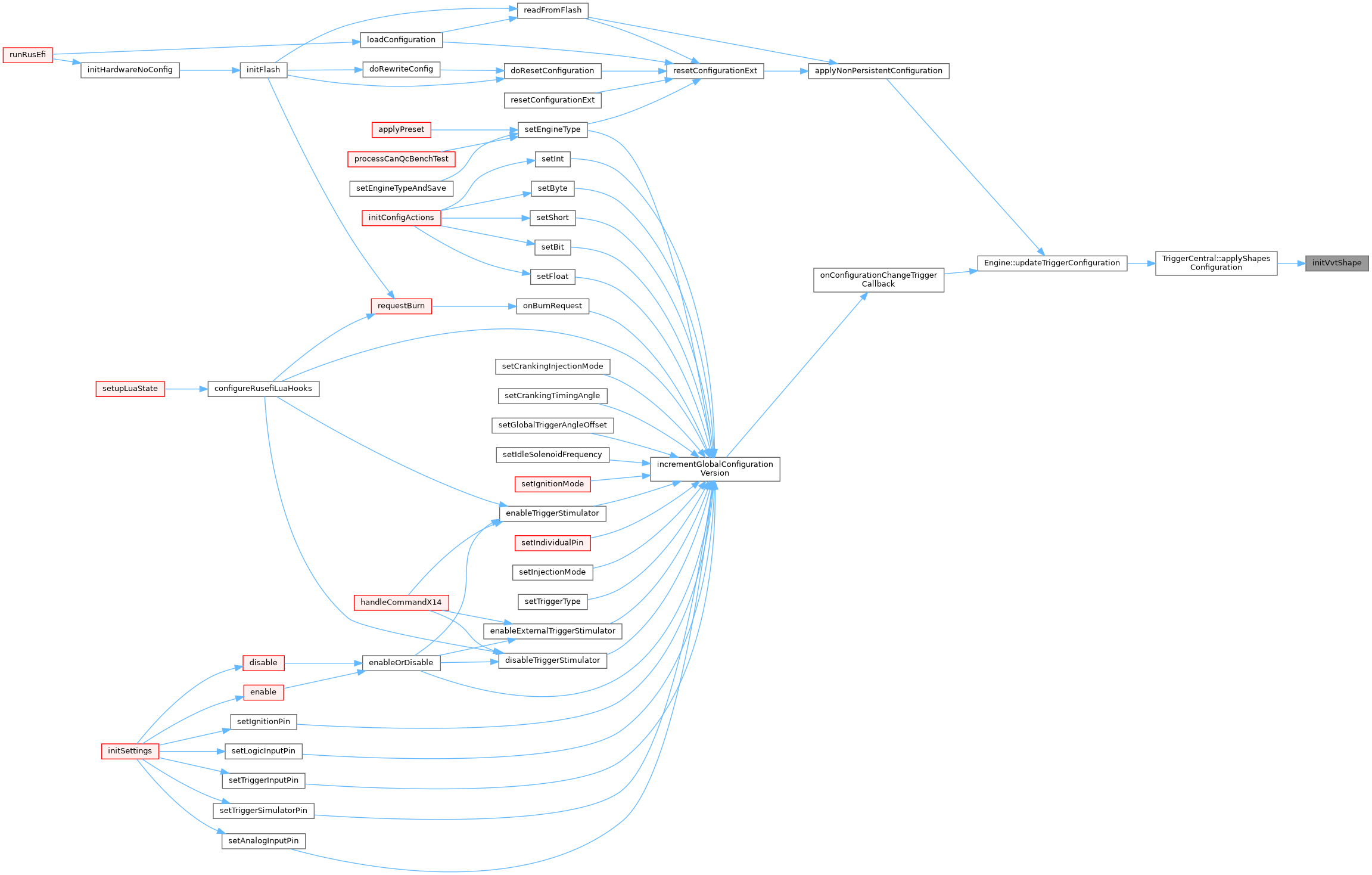
◆ initVvtShape()
|
static |
Definition at line 1108 of file trigger_central.cpp.
Referenced by TriggerCentral::applyShapesConfiguration().
◆ logVvtFront()
|
static |
Definition at line 234 of file trigger_central.cpp.
Referenced by handleVvtCamSignal().
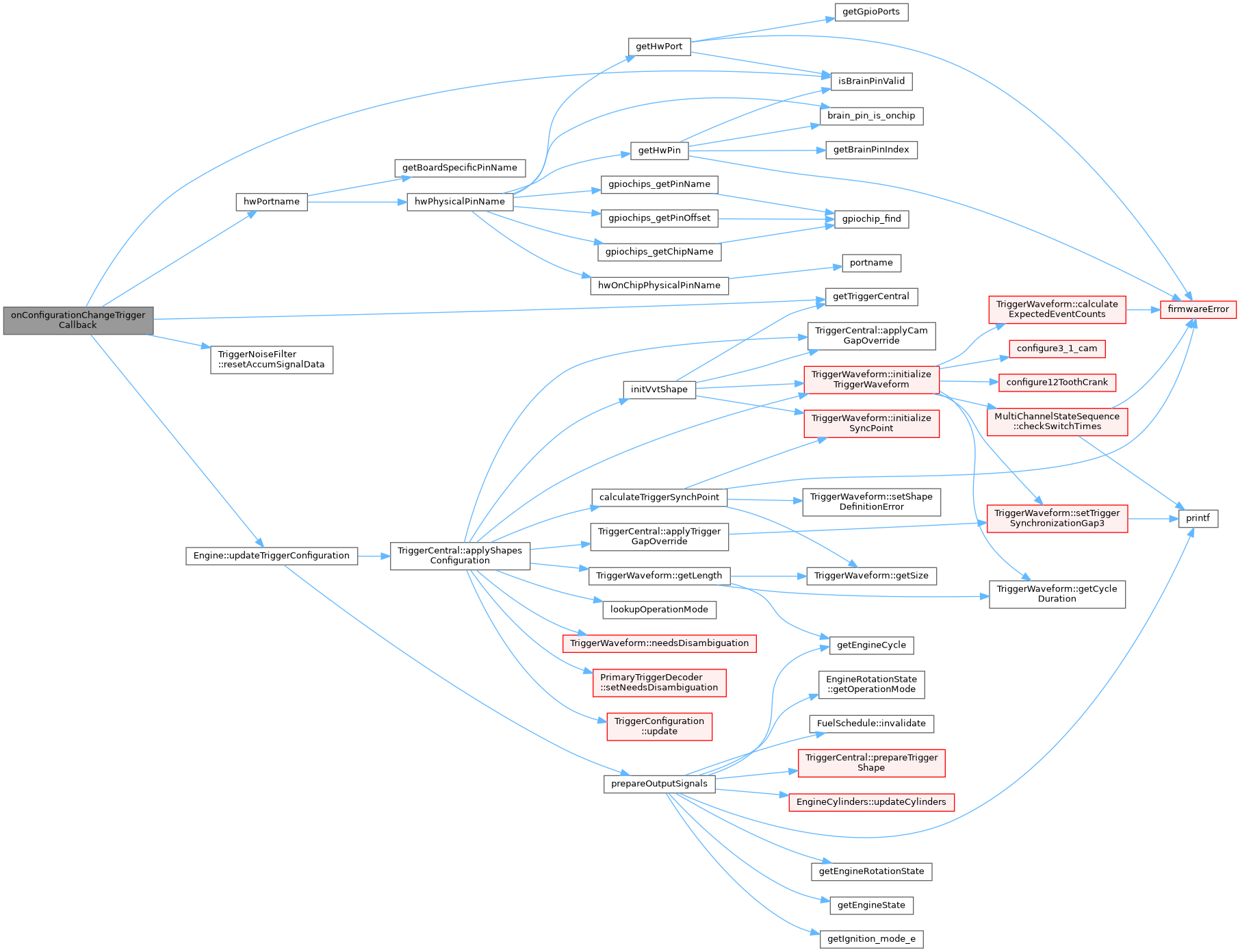
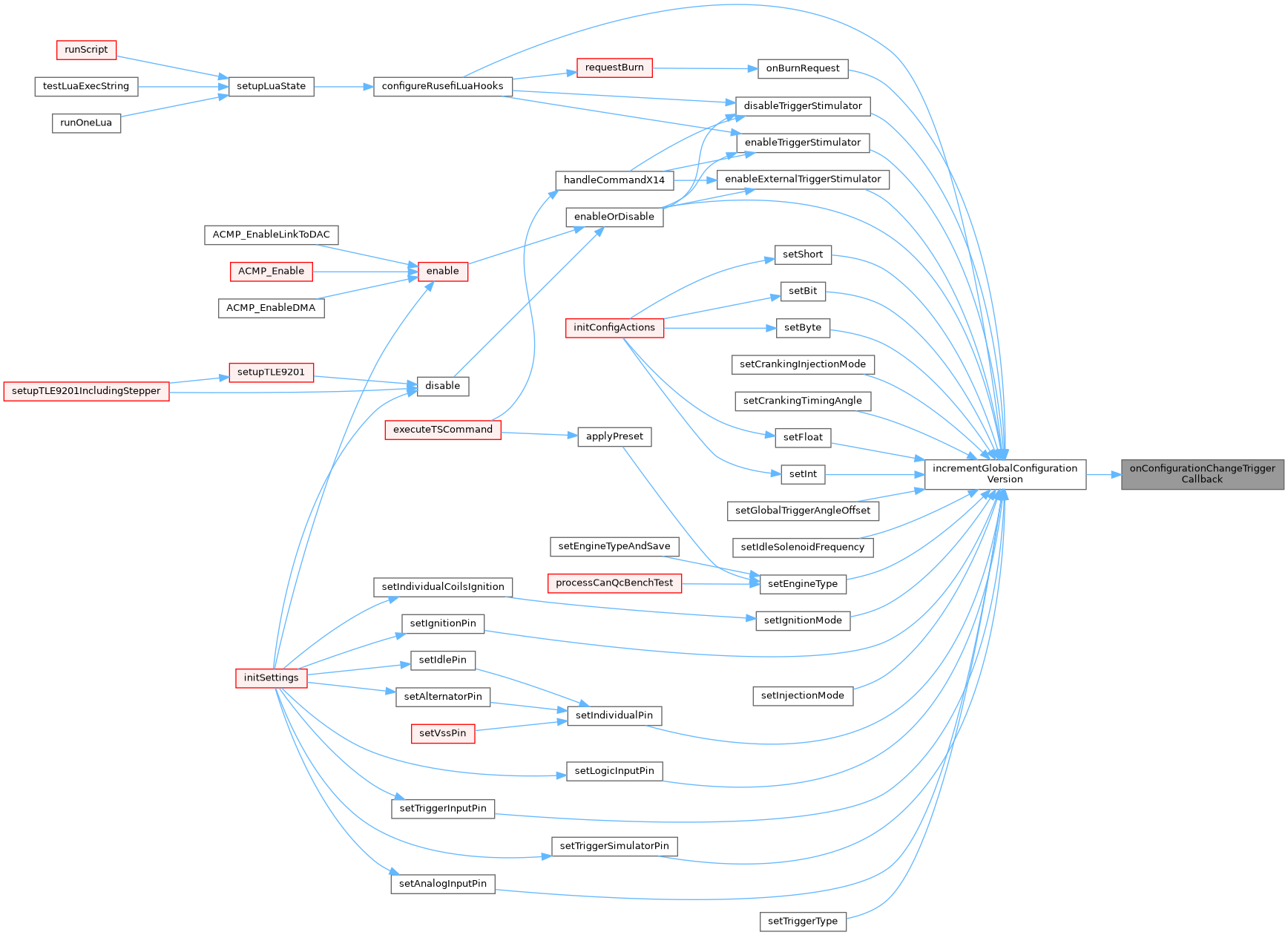
◆ onConfigurationChangeTriggerCallback()
| void onConfigurationChangeTriggerCallback | ( | ) |
Definition at line 1056 of file trigger_central.cpp.
Referenced by incrementGlobalConfigurationVersion().
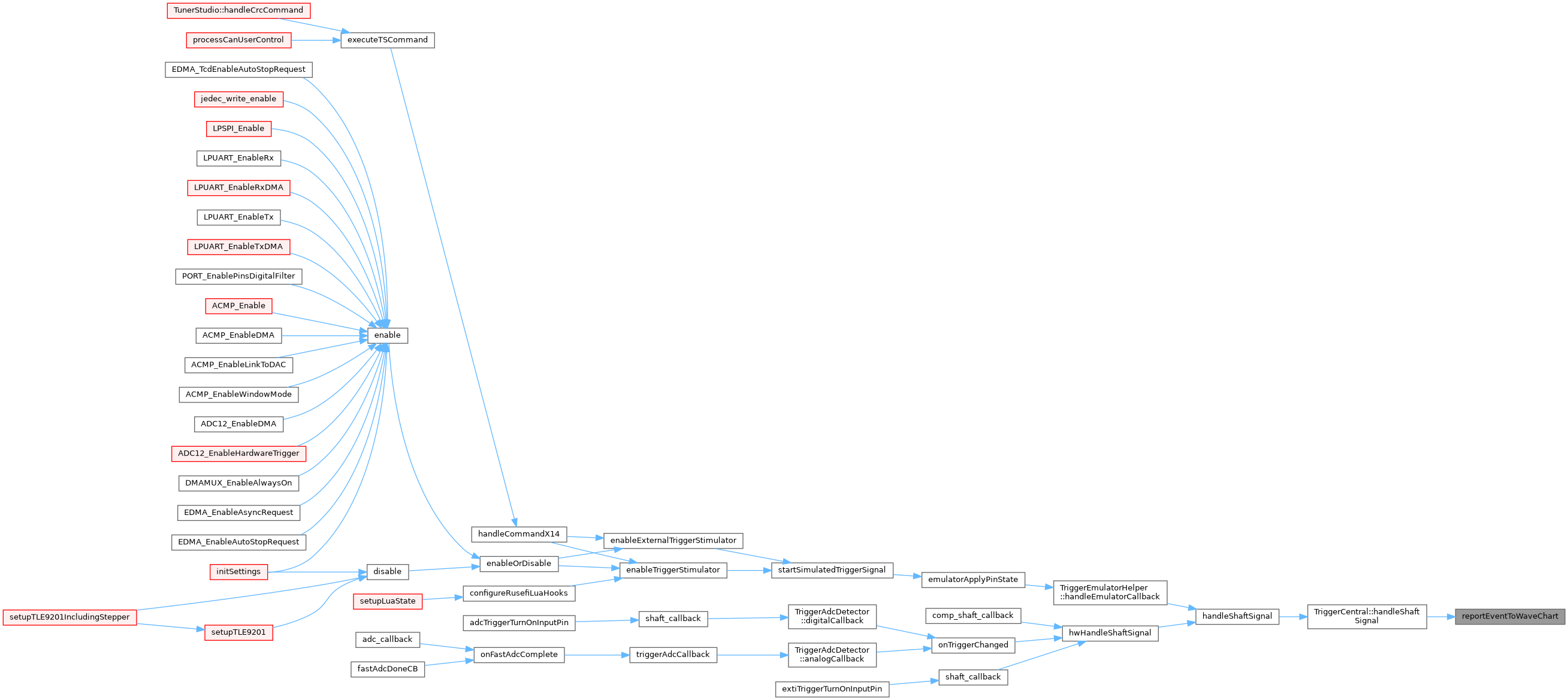
◆ reportEventToWaveChart()
|
static |
Definition at line 569 of file trigger_central.cpp.
Referenced by TriggerCentral::handleShaftSignal().

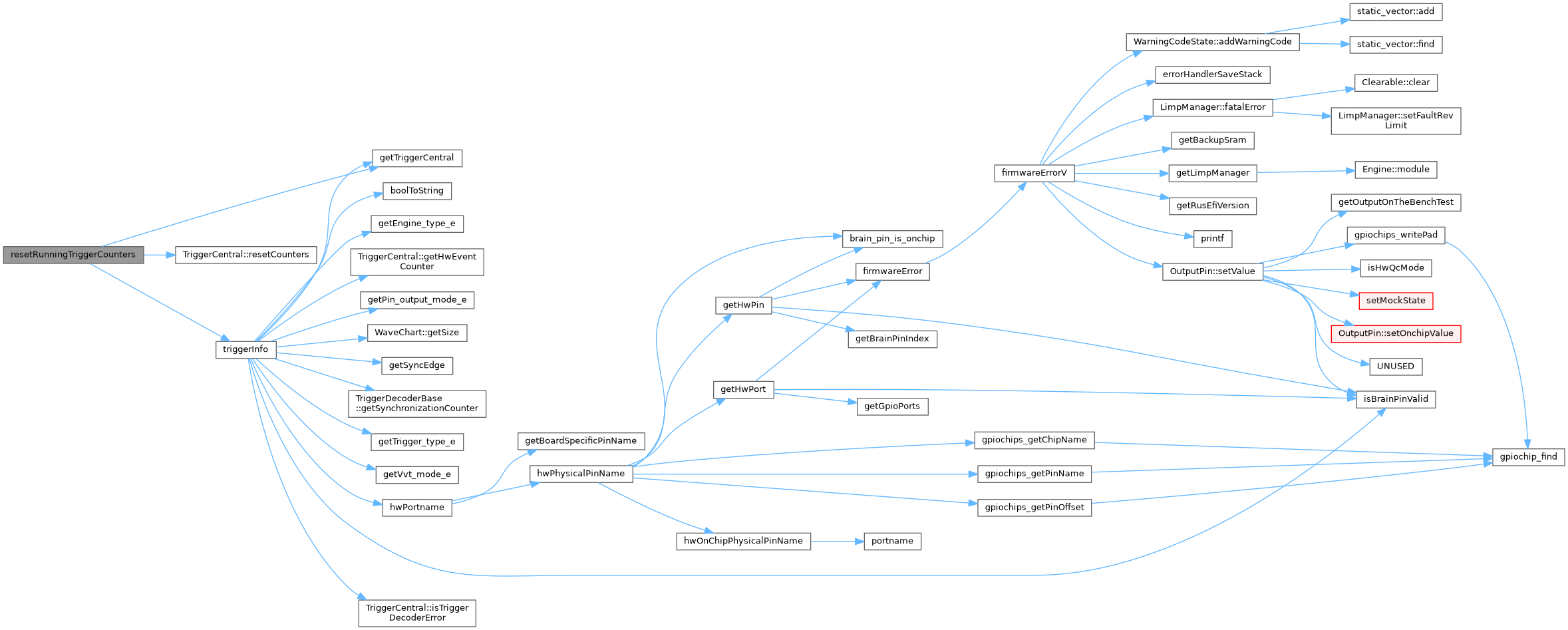
◆ resetRunningTriggerCounters()
|
static |
Definition at line 1049 of file trigger_central.cpp.
Referenced by initTriggerCentral().

◆ skipToothSpecialShape()
| PUBLIC_API_WEAK bool skipToothSpecialShape | ( | size_t | index, |
| vvt_mode_e | vvtMode, | ||
| angle_t | currentPosition | ||
| ) |
- Returns
- true if tooth should be ignored
Definition at line 299 of file trigger_central.cpp.
Referenced by handleVvtCamSignal().

◆ tooSoonToHandleSignal()
|
static |
Definition at line 256 of file trigger_central.cpp.
Referenced by hwHandleShaftSignal(), and hwHandleVvtCamSignal().

◆ triggerInfo()
| void triggerInfo | ( | void | ) |
Definition at line 958 of file trigger_central.cpp.
Referenced by initTriggerCentral(), and resetRunningTriggerCounters().


◆ triggerShapeInfo()
|
static |
Definition at line 941 of file trigger_central.cpp.
Referenced by initTriggerCentral().

◆ validateTriggerInputs()
| void validateTriggerInputs | ( | ) |
Definition at line 1265 of file trigger_central.cpp.
Referenced by startHardware().

◆ vvtWithRealDecoder()
|
static |
Definition at line 127 of file trigger_central.cpp.
Referenced by handleVvtCamSignal().

◆ wrapVvt()
See also wrapAngle
Definition at line 223 of file trigger_central.cpp.
Referenced by handleVvtCamSignal().

Variable Documentation
◆ initState
| TriggerDecoderBase initState("init") | ( | "init" | ) |
Referenced by TriggerCentral::applyShapesConfiguration(), calculateTriggerSynchPoint(), and initVvtShape().
◆ mapAtAngle
| float mapAtAngle[200] |
Definition at line 690 of file trigger_central.cpp.
Referenced by TriggerCentral::decodeMapCam().
◆ maxTriggerReentrant
| int maxTriggerReentrant = 0 |
Definition at line 460 of file trigger_central.cpp.
Referenced by handleShaftSignal(), printRuntimeStats(), and updateTunerStudioState().
◆ triggerDuration
| uint32_t triggerDuration |
Definition at line 461 of file trigger_central.cpp.
Referenced by handleShaftSignal().
◆ triggerEmulatorSignals
|
extern |
Definition at line 69 of file trigger_emulator_algo.cpp.
Referenced by disableTriggerStimulator(), emulatorApplyPinState(), setTriggerEmulatorRPM(), startSimulatedTriggerSignal(), startTriggerEmulatorPins(), stopTriggerEmulatorPins(), triggerInfo(), and updateTriggerWaveformIfNeeded().
◆ triggerMaxDuration
| uint32_t triggerMaxDuration = 0 |
Definition at line 462 of file trigger_central.cpp.
Referenced by handleShaftSignal(), resetMaxValues(), and triggerInfo().
◆ triggerReentrant
| int triggerReentrant = 0 |
Definition at line 459 of file trigger_central.cpp.
Referenced by handleShaftSignal().
◆ waveChart
| WaveChart waveChart |
Definition at line 32 of file trigger_central.cpp.
Referenced by addEngineSnifferTdcEvent(), initTriggerCentral(), printOverallStatus(), Engine::resetEngineSnifferIfInTestMode(), resetNow(), and triggerInfo().
◆ wheelIndeces
|
static |
Definition at line 567 of file trigger_central.cpp.
Referenced by reportEventToWaveChart().