Enumerations | |
| enum | msiobox_state { MSIOBOX_DISABLED = 0 , MSIOBOX_WAIT_INIT , MSIOBOX_WAIT_WHOAMI , MSIOBOX_READY , MSIOBOX_FAILED } |
Functions | |
| struct pwm_settings | __attribute__ ((packed)) |
| void | initCanGpioMsiobox () |
Variables | |
| typedef | __attribute__ |
| Ignition Mode. | |
| beuint16_t | on |
| beuint16_t | off |
| uint8_t | pwm_mask |
| uint8_t | pad0 |
| uint8_t | tachin_mask |
| uint8_t | pad1 |
| uint8_t | adc_broadcast_interval |
| uint8_t | tach_broadcast_interval |
| uint8_t | pad2 [2] |
| pwm_settings | ch [2] |
| uint8_t | out_state |
| uint8_t | version |
| uint8_t | pad [3] |
| beuint16_t | pwm_period |
| beuint16_t | tachin_period |
| beuint16_t | adc [4] |
| uint8_t | inputs |
| beuint32_t | period |
| beuint16_t | n_teeth |
| beuint16_t | total_tooth |
| static MsIoBox | instance [BOARD_CAN_GPIO_COUNT] |
Enumeration Type Documentation
◆ msiobox_state
| enum msiobox_state |
| Enumerator | |
|---|---|
| MSIOBOX_DISABLED | |
| MSIOBOX_WAIT_INIT | |
| MSIOBOX_WAIT_WHOAMI | |
| MSIOBOX_READY | |
| MSIOBOX_FAILED | |
Definition at line 155 of file can_gpio_msiobox.cpp.
Function Documentation
◆ __attribute__()
| struct pwm_settings __attribute__ | ( | (packed) | ) |
Definition at line 38 of file tooth_logger.h.
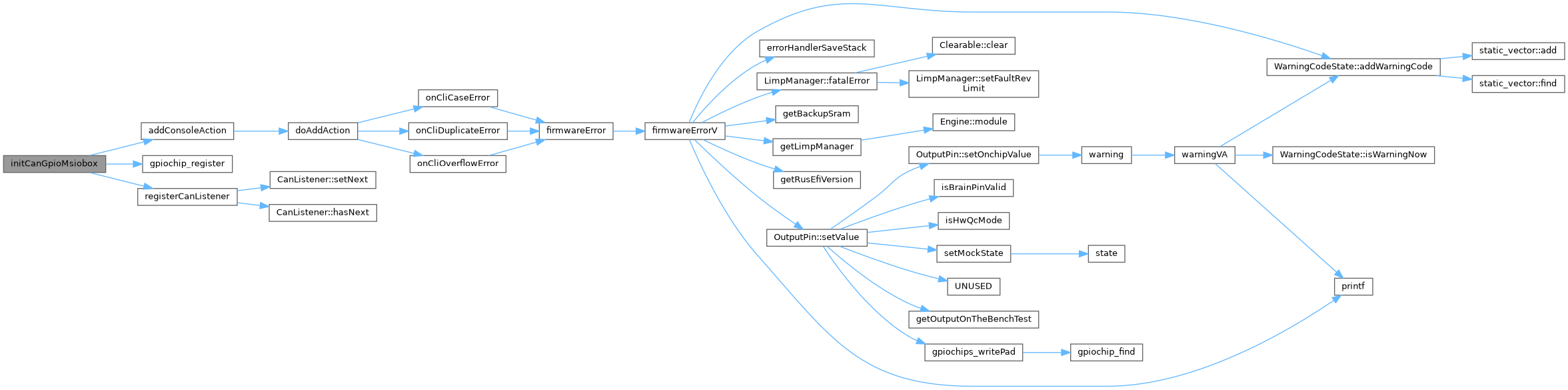
◆ initCanGpioMsiobox()
| void initCanGpioMsiobox | ( | ) |
Definition at line 547 of file can_gpio_msiobox.cpp.
Referenced by initSmartGpio().

Variable Documentation
◆ __attribute__
| static __attribute__ |
Ignition Mode.
- See also
- getNumberOfInjections
See spi3mosiPin See spi2MisoMode
inertia measurement unit, yawn accelerometer By the way both kinds of BOSCH use Housing : TE 1-967640-1, pins 144969-1 seal 967056-1 plug 967067-2
Net Body Computer types
This mode is useful for troubleshooting and research - events are logged but no effects on phase synchronization
Single tooth on the camshaft anywhere in the 720 degree cycle
Toyota 2JZ has three cam tooth. We pick one of these three tooth to synchronize based on the expected angle position of the event
Mazda NB2 has three cam tooth. We synchronize based on gap ratio.
1.8l Toyota 1ZZ-FE https://rusefi.com/forum/viewtopic.php?f=3&t=1735 4 minus one
4 equally spaced no way to sync
4 plus one
Definition at line 44 of file rusefi_enums.h.
◆ adc
| beuint16_t adc[3] |
Definition at line 0 of file can_gpio_msiobox.cpp.
◆ adc_broadcast_interval
| uint8_t adc_broadcast_interval |
Definition at line 4 of file can_gpio_msiobox.cpp.
◆ ch
| pwm_settings ch |
Definition at line 0 of file can_gpio_msiobox.cpp.
Referenced by doAddAction(), and tokenLength().
◆ inputs
| uint8_t inputs |
Definition at line 0 of file can_gpio_msiobox.cpp.
◆ instance
|
static |
Definition at line 545 of file can_gpio_msiobox.cpp.
Referenced by initCanGpioMsiobox().
◆ n_teeth
| beuint16_t n_teeth |
Definition at line 1 of file can_gpio_msiobox.cpp.
◆ off
| beuint16_t off |
Definition at line 1 of file can_gpio_msiobox.cpp.
Referenced by add4cylblock(), FlashBufferedWrite(), and initJeep18_2_2_2().
◆ on
| beuint16_t on |
Definition at line 0 of file can_gpio_msiobox.cpp.
◆ out_state
| uint8_t out_state |
Definition at line 1 of file can_gpio_msiobox.cpp.
◆ pad
| uint8_t pad |
Definition at line 1 of file can_gpio_msiobox.cpp.
Referenced by _pal_lld_disablepadevent(), _pal_lld_enablepadevent(), _pal_lld_readpad(), _pal_lld_setpadmode(), and _pal_lld_writepad().
◆ pad0
| uint8_t pad0 |
Definition at line 1 of file can_gpio_msiobox.cpp.
◆ pad1
| uint8_t pad1 |
Definition at line 3 of file can_gpio_msiobox.cpp.
◆ pad2
| uint8_t pad2[2] |
Definition at line 6 of file can_gpio_msiobox.cpp.
◆ period
| beuint32_t period |
Definition at line 0 of file can_gpio_msiobox.cpp.
Referenced by getChannelFreqAndDuty(), getNextSwitchTimeNt(), WarningCodeState::isWarningNow(), mlgLogger(), WarningCodeState::refreshTs(), roundTxPeriodToCycle(), PwmConfig::togglePwmState(), and wrapVvt().
◆ pwm_mask
| uint8_t pwm_mask |
Definition at line 0 of file can_gpio_msiobox.cpp.
◆ pwm_period
| beuint16_t pwm_period |
Definition at line 2 of file can_gpio_msiobox.cpp.
◆ tach_broadcast_interval
| uint8_t tach_broadcast_interval |
Definition at line 5 of file can_gpio_msiobox.cpp.
◆ tachin_mask
| uint8_t tachin_mask |
Definition at line 2 of file can_gpio_msiobox.cpp.
◆ tachin_period
| beuint16_t tachin_period |
Definition at line 3 of file can_gpio_msiobox.cpp.
◆ total_tooth
| beuint16_t total_tooth |
Definition at line 2 of file can_gpio_msiobox.cpp.
◆ version
| uint8_t version |
Definition at line 0 of file can_gpio_msiobox.cpp.
Referenced by updateTriggerWaveformIfNeeded().