Detailed Description
- Date
- Mar 19, 2020
Definition in file can.h.
Data Structures | |
| class | CanWrite |
| class | CanCycle |
Typedefs | |
| using | CI = CanInterval |
Enumerations | |
| enum class | CanInterval : uint16_t { None = 0 , _5ms = 1 << 0 , _10ms = 1 << 1 , _20ms = 1 << 2 , _50ms = 1 << 3 , _100ms = 1 << 4 , _200ms = 1 << 5 , _250ms = 1 << 6 , _500ms = 1 << 7 , _1000ms = 1 << 8 , _MAX_Cycle = _1000ms } |
Functions | |
| void | resetCanWriteCycle () |
| void | processCanRxMessage (const size_t busIndex, const CANRxFrame &msg, efitick_t nowNt) |
| void | registerCanListener (CanListener &listener) |
| void | unregisterCanListener (CanListener &listener) |
| void | registerCanSensor (CanSensorBase &sensor) |
| constexpr CI | operator| (CI lhs, CI rhs) |
| constexpr CI | operator& (CI lhs, CI rhs) |
| constexpr CI & | operator|= (CI &lhs, CI rhs) |
Typedef Documentation
◆ CI
| using CI = CanInterval |
Enumeration Type Documentation
◆ CanInterval
|
strong |
| Enumerator | |
|---|---|
| None | |
| _5ms | |
| _10ms | |
| _20ms | |
| _50ms | |
| _100ms | |
| _200ms | |
| _250ms | |
| _500ms | |
| _1000ms | |
| _MAX_Cycle | |
Definition at line 35 of file can.h.
35 : uint16_t {
36 None = 0,
37 _5ms = 1 << 0,
38 _10ms = 1 << 1,
39 _20ms = 1 << 2,
40 _50ms = 1 << 3,
41 _100ms = 1 << 4,
42 _200ms = 1 << 5,
43 _250ms = 1 << 6,
44 _500ms = 1 << 7,
45 _1000ms = 1 << 8,
47};
@ _50ms
@ _5ms
@ _MAX_Cycle
@ _200ms
@ _10ms
@ None
@ _250ms
@ _20ms
@ _1000ms
@ _500ms
@ _100ms
Function Documentation
◆ operator&()
◆ operator|()
◆ operator|=()
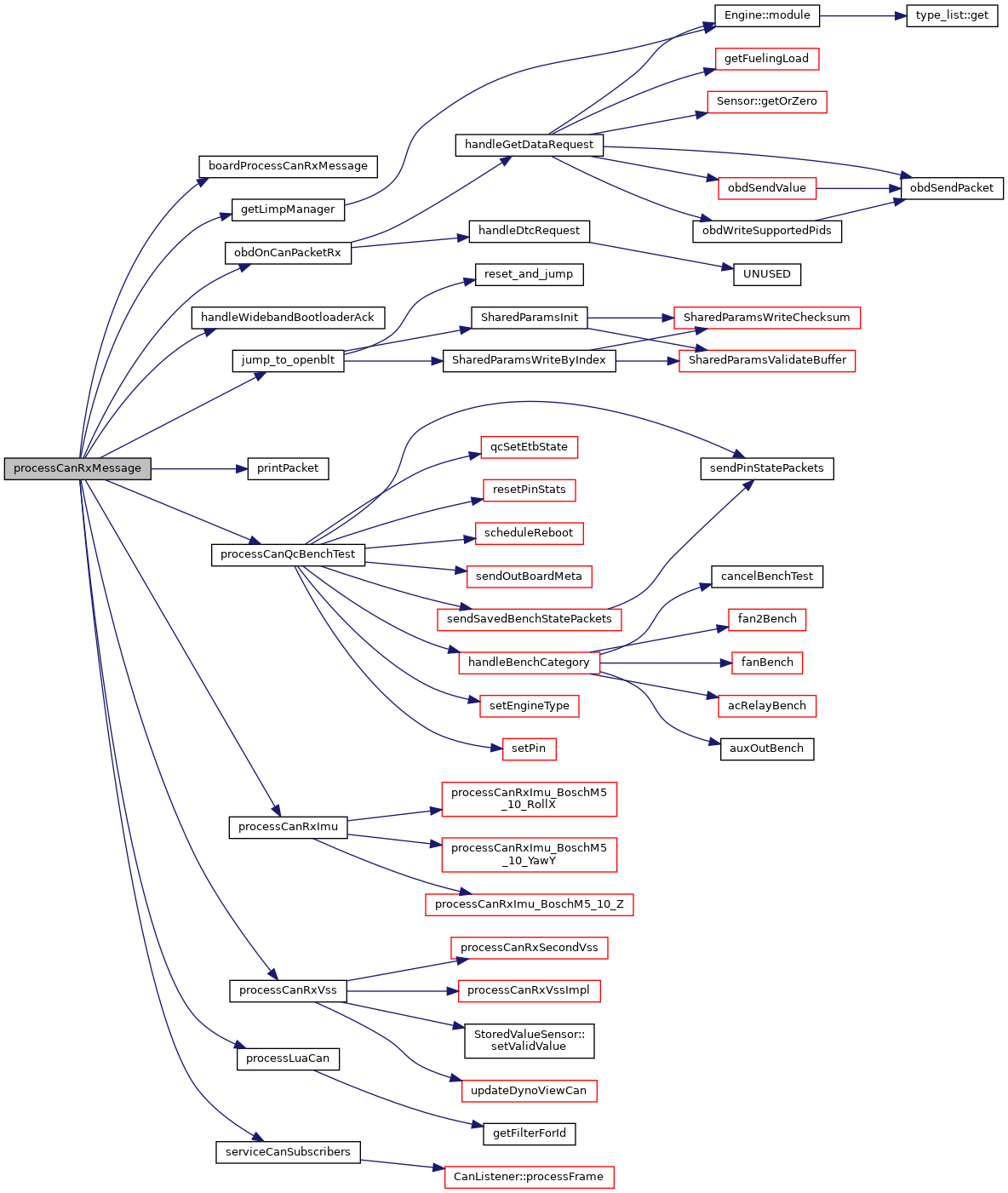
◆ processCanRxMessage()
| void processCanRxMessage | ( | const size_t | busIndex, |
| const CANRxFrame & | msg, | ||
| efitick_t | nowNt | ||
| ) |
Definition at line 227 of file can_rx.cpp.
227 {
231#if (EFI_CAN_BUS_COUNT >= 3)
233#endif
234 0) {
235 printCANRxFrame(busIndex, frame);
236 }
237
238 // TODO use call_board_override
240 custom_board_can_rx.value()(busIndex, frame, nowNt);
241 }
242
243 // see AemXSeriesWideband as an example of CanSensorBase/CanListener
244 serviceCanSubscribers(busIndex, frame, nowNt);
245
246 // todo: convert to CanListener or not?
247 //Vss is configurable, should we handle it here:
248 processCanRxVss(frame, nowNt);
249
251 // todo: convert to CanListener or not?
252 processCanRxImu(frame);
253 }
254
255/*
256static Timer dashAliveTimer;
257
258 if (CAN_EID(frame) == (int)bench_test_packet_ids_e::DASH_ALIVE) {
259 // todo: add an indicator that dash is connected?
260 dashAliveTimer.reset();
261 }
262*/
263
264 processCanQcBenchTest(frame);
265 processCanEcuControl(frame);
266
267 processLuaCan(busIndex, frame);
268
269 {
270 obdOnCanPacketRx(frame, busIndex);
271 }
272
273#if EFI_ENGINE_CONTROL
274 if (CAN_EID(frame) == GDI4_BASE_ADDRESS && frame.data8[7] == GDI4_MAGIC) {
275// efiPrintf("CAN GDI4 says hi");
277 }
278#endif // EFI_ENGINE_CONTROL
279
280 handleWidebandCan(busIndex, frame);
281#if EFI_USE_OPENBLT
282#include "openblt/efi_blt_ids.h"
283 if ((CAN_SID(frame) == BOOT_COM_CAN_RX_MSG_ID) && (frame.DLC == 2)) {
284 /* TODO: gracefull shutdown? */
287 jump_to_openblt();
288 }
289 }
290#endif
291}
void processCanQcBenchTest(const CANRxFrame &frame)
Definition can_bench_test.cpp:298
void printCANRxFrame(const size_t busIndex, const CANRxFrame &rx)
Definition can_rx.cpp:29
void serviceCanSubscribers(const size_t busIndex, const CANRxFrame &frame, efitick_t nowNt)
Definition can_rx.cpp:71
void processCanRxVss(const CANRxFrame &frame, efitick_t nowNt)
Definition can_vss.cpp:177
static constexpr engine_configuration_s * engineConfiguration
Definition engine_configuration.h:80
void processLuaCan(const size_t busIndex, const CANRxFrame &frame)
Definition lua_can_rx.cpp:38
void handleWidebandCan(const size_t busIndex, const CANRxFrame &frame)
Definition rusefi_wideband.cpp:31
bool verboseCan3
bool useSpiImu
bool verboseCan2
bool can2OpenBLT
bool canOpenBLT
bool verboseCan
Here is the call graph for this function:
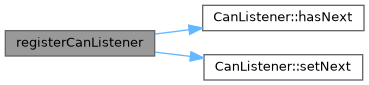
◆ registerCanListener()
| void registerCanListener | ( | CanListener & | listener | ) |
Definition at line 86 of file can_rx.cpp.
86 {
87 // Do this under lock?
88
89 // If the listener already has a next, it's already registered
92 canListeners_head = &listener;
93 }
94}
Referenced by CanTransport::init(), initCanGpioMsiobox(), IsoTpRx::IsoTpRx(), and registerCanSensor().
Here is the call graph for this function:
Here is the caller graph for this function:

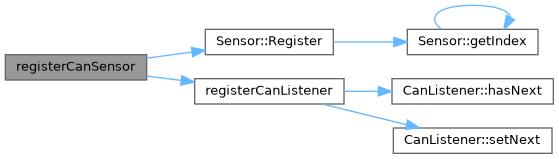
◆ registerCanSensor()
| void registerCanSensor | ( | CanSensorBase & | sensor | ) |
Definition at line 116 of file can_rx.cpp.
116 {
119}
static Lps25Sensor sensor(device)
Referenced by initCanSensors(), initEgt(), and initLambda().
Here is the call graph for this function:
Here is the caller graph for this function:

◆ resetCanWriteCycle()
| void resetCanWriteCycle | ( | ) |
Definition at line 48 of file can_tx.cpp.
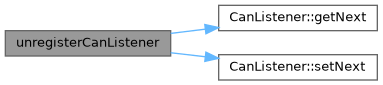
◆ unregisterCanListener()
| void unregisterCanListener | ( | CanListener & | listener | ) |
Definition at line 96 of file can_rx.cpp.
96 {
97 // Do this under lock?
98
99 // listener is at head of list...
102 } else {
104
106 current = current->getNext();
107 }
110 }
111 }
112
114}
Definition can_listener.h:12
Referenced by IsoTpRx::~IsoTpRx().
Here is the call graph for this function:
Here is the caller graph for this function:
