Detailed Description
Functions | |
| static expected< uint16_t > | look_up_rpm_can_id (can_vss_nbc_e type) |
| static expected< uint16_t > | look_up_vss_can_id (can_vss_nbc_e type) |
| static uint16_t | look_up_second_vss_can_id (can_vss_nbc_e type) |
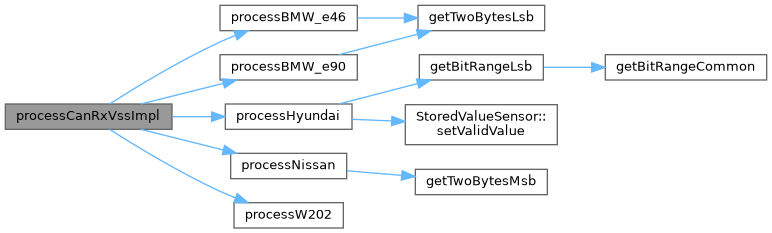
| float | processBMW_e46 (const CANRxFrame &frame) |
| float | processNissan (const CANRxFrame &frame) |
| float | processBMW_e90 (const CANRxFrame &frame) |
| float | processW202 (const CANRxFrame &frame) |
| float | processHyundai (const CANRxFrame &frame, efitick_t nowNt) |
| expected< float > | processCanRxVssImpl (const CANRxFrame &frame, efitick_t nowNt) |
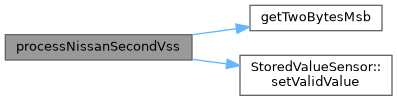
| static void | processNissanSecondVss (const CANRxFrame &frame, efitick_t nowNt) |
| void | processCanRxSecondVss (const CANRxFrame &frame, efitick_t nowNt) |
| void | processCanRxVss (const CANRxFrame &frame, efitick_t nowNt) |
| void | initCanVssSupport () |
| void | setCanVss (int type) |
Variables | |
| static bool | isInit = false |
| static uint16_t | filterVssCanID = 0 |
| static uint16_t | filterSecondVssCanID = 0 |
| static uint16_t | filterRpmCanID = 0 |
| static StoredValueSensor | wheelSlipRatio (SensorType::WheelSlipRatio, MS2NT(1000)) |
| static int | nissanFrontAxle = 0 |
| static StoredValueSensor | canSpeed (SensorType::VehicleSpeed, MS2NT(500)) |
Function Documentation
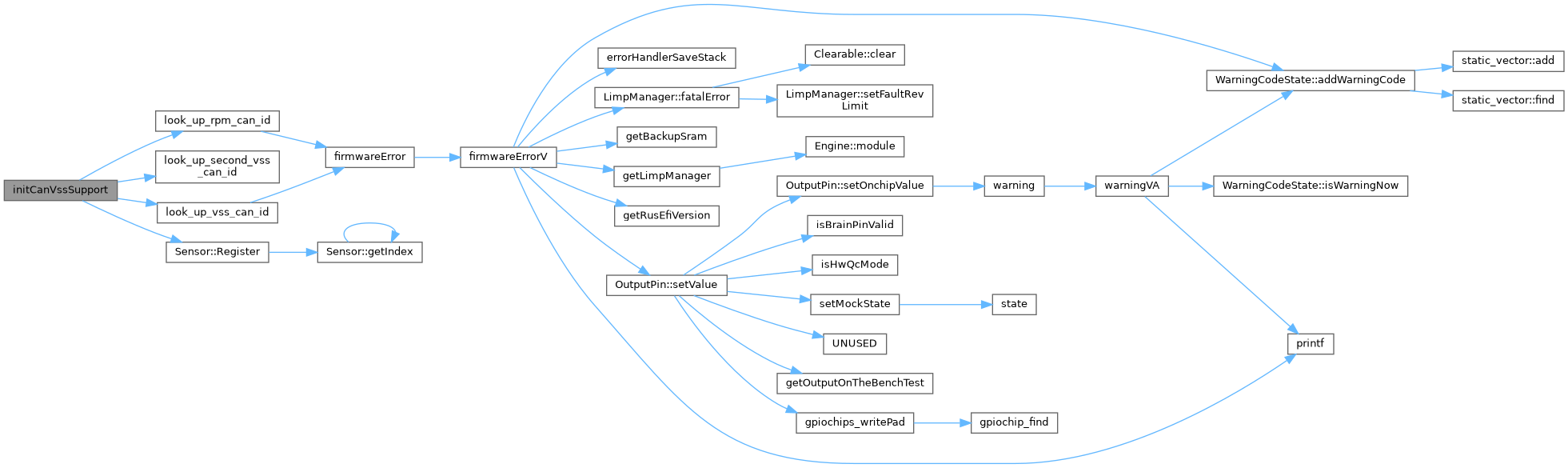
◆ initCanVssSupport()
| void initCanVssSupport | ( | ) |
Definition at line 199 of file can_vss.cpp.
Referenced by initHardware().

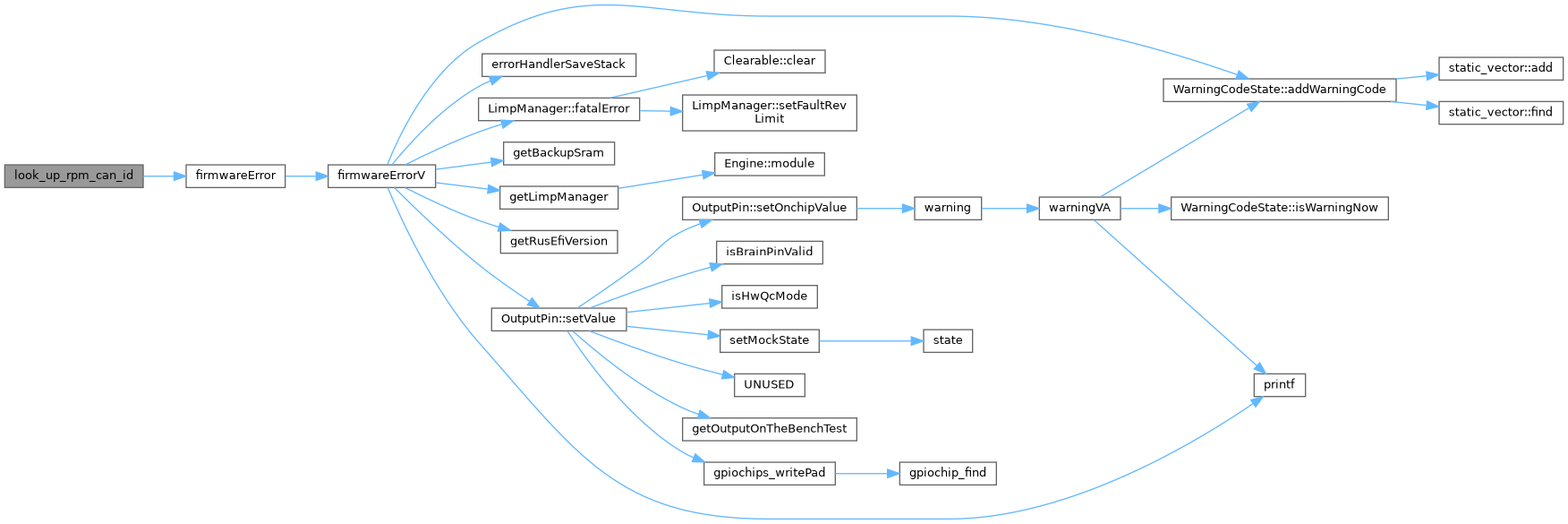
◆ look_up_rpm_can_id()
|
static |
Definition at line 24 of file can_vss.cpp.
Referenced by initCanVssSupport().

◆ look_up_second_vss_can_id()
|
static |
Definition at line 65 of file can_vss.cpp.
Referenced by initCanVssSupport().

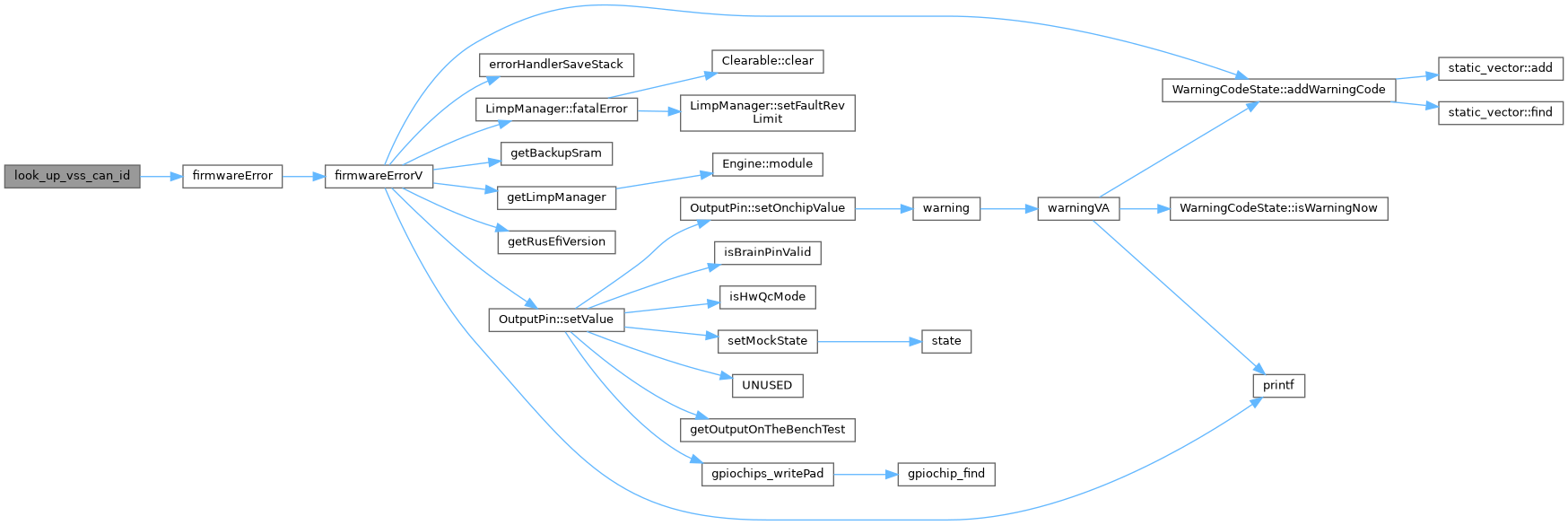
◆ look_up_vss_can_id()
|
static |
Definition at line 43 of file can_vss.cpp.
Referenced by initCanVssSupport().

◆ processBMW_e46()
| float processBMW_e46 | ( | const CANRxFrame & | frame | ) |
Definition at line 78 of file can_vss.cpp.
Referenced by processCanRxVssImpl().


◆ processBMW_e90()
| float processBMW_e90 | ( | const CANRxFrame & | frame | ) |
Definition at line 99 of file can_vss.cpp.
Referenced by processCanRxVssImpl().


◆ processCanRxSecondVss()
| void processCanRxSecondVss | ( | const CANRxFrame & | frame, |
| efitick_t | nowNt | ||
| ) |
Definition at line 167 of file can_vss.cpp.
Referenced by processCanRxVss().


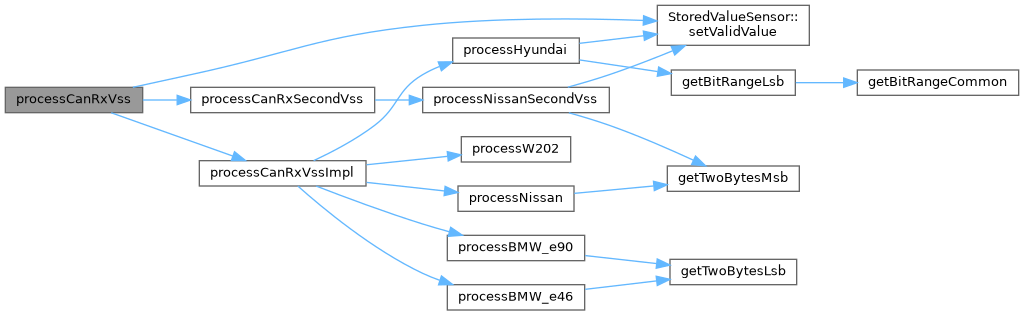
◆ processCanRxVss()
| void processCanRxVss | ( | const CANRxFrame & | frame, |
| efitick_t | nowNt | ||
| ) |
Definition at line 177 of file can_vss.cpp.
Referenced by processCanRxMessage().

◆ processCanRxVssImpl()
| expected< float > processCanRxVssImpl | ( | const CANRxFrame & | frame, |
| efitick_t | nowNt | ||
| ) |
Definition at line 132 of file can_vss.cpp.
Referenced by processCanRxVss().

◆ processHyundai()
| float processHyundai | ( | const CANRxFrame & | frame, |
| efitick_t | nowNt | ||
| ) |
Definition at line 112 of file can_vss.cpp.
Referenced by processCanRxVssImpl().


◆ processNissan()
| float processNissan | ( | const CANRxFrame & | frame | ) |
Definition at line 89 of file can_vss.cpp.
Referenced by processCanRxVssImpl().


◆ processNissanSecondVss()
|
static |
Definition at line 153 of file can_vss.cpp.
Referenced by processCanRxSecondVss().

◆ processW202()
| float processW202 | ( | const CANRxFrame & | frame | ) |
Definition at line 103 of file can_vss.cpp.
Referenced by processCanRxVssImpl().

◆ setCanVss()
| void setCanVss | ( | int | type | ) |
Definition at line 221 of file can_vss.cpp.
Variable Documentation
◆ canSpeed
|
static |
Referenced by initCanVssSupport(), and processCanRxVss().
◆ filterRpmCanID
|
static |
Definition at line 20 of file can_vss.cpp.
Referenced by initCanVssSupport(), and processCanRxVss().
◆ filterSecondVssCanID
|
static |
Definition at line 19 of file can_vss.cpp.
Referenced by initCanVssSupport(), and processCanRxVss().
◆ filterVssCanID
|
static |
Definition at line 18 of file can_vss.cpp.
Referenced by initCanVssSupport(), and processCanRxVss().
◆ isInit
|
static |
Definition at line 17 of file can_vss.cpp.
Referenced by initCanVssSupport(), and processCanRxVss().
◆ nissanFrontAxle
|
static |
Definition at line 87 of file can_vss.cpp.
Referenced by processNissan(), and processNissanSecondVss().
◆ wheelSlipRatio
|
static |
Referenced by initCanVssSupport(), processHyundai(), and processNissanSecondVss().