Detailed Description
CAN reception handling. This file handles multiplexing incoming CAN frames as appropriate to the subsystems that consume them.
- Date
- Mar 19, 2020
Definition in file can_rx.cpp.
Variables | |
| static CanListenerTailSentinel | tailSentinel |
| CanListener * | canListeners_head = &tailSentinel |
| bool | verboseRxCan |
| std::optional< board_can_rx_type > | custom_board_can_rx |
Function Documentation
◆ boardProcessCanRxMessage()
| void boardProcessCanRxMessage | ( | const size_t | , |
| const CANRxFrame & | , | ||
| efitick_t | |||
| ) |
Definition at line 220 of file can_rx.cpp.
◆ getFourBytesLsb()
| uint32_t getFourBytesLsb | ( | const CANRxFrame & | frame, |
| int | offset | ||
| ) |
Definition at line 143 of file can_rx.cpp.
Referenced by processCanRequestCalibration().

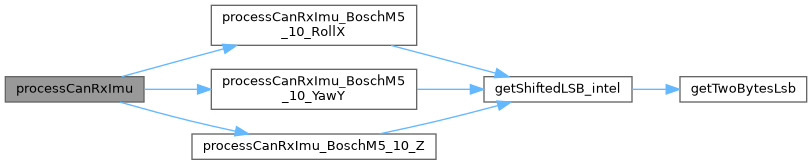
◆ getShiftedLSB_intel()
|
static |
Definition at line 158 of file can_rx.cpp.
Referenced by processCanRxImu_BoschM5_10_RollX(), processCanRxImu_BoschM5_10_YawY(), and processCanRxImu_BoschM5_10_Z().


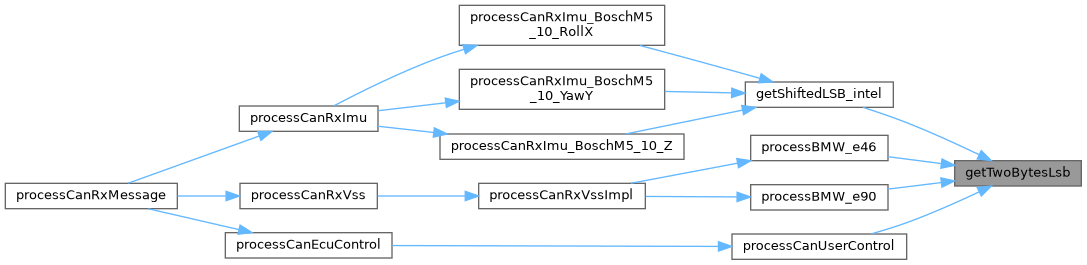
◆ getTwoBytesLsb()
| uint16_t getTwoBytesLsb | ( | const CANRxFrame & | frame, |
| int | offset | ||
| ) |
Definition at line 150 of file can_rx.cpp.
Referenced by getShiftedLSB_intel(), processBMW_e46(), processBMW_e90(), and processCanUserControl().
◆ getTwoBytesMsb()
| uint16_t getTwoBytesMsb | ( | const CANRxFrame & | frame, |
| int | offset | ||
| ) |
Definition at line 154 of file can_rx.cpp.
Referenced by processNissan(), and processNissanSecondVss().

◆ printCANRxFrame()
| void printCANRxFrame | ( | const size_t | busIndex, |
| const CANRxFrame & | rx | ||
| ) |
this build-in CAN sniffer is very basic but that's our CAN sniffer
Definition at line 29 of file can_rx.cpp.
Referenced by processCanRxMessage(), IsoTpRx::readTimeout(), CanStreamerState::receiveFrame(), and IsoTpRx::resetRxVerbose().

◆ processCanRxImu()
|
static |
Definition at line 184 of file can_rx.cpp.
Referenced by processCanRxMessage().

◆ processCanRxImu_BoschM5_10_RollX()
|
static |
Definition at line 171 of file can_rx.cpp.
Referenced by processCanRxImu().


◆ processCanRxImu_BoschM5_10_YawY()
|
static |
Definition at line 162 of file can_rx.cpp.
Referenced by processCanRxImu().


◆ processCanRxImu_BoschM5_10_Z()
|
static |
Definition at line 178 of file can_rx.cpp.
Referenced by processCanRxImu().


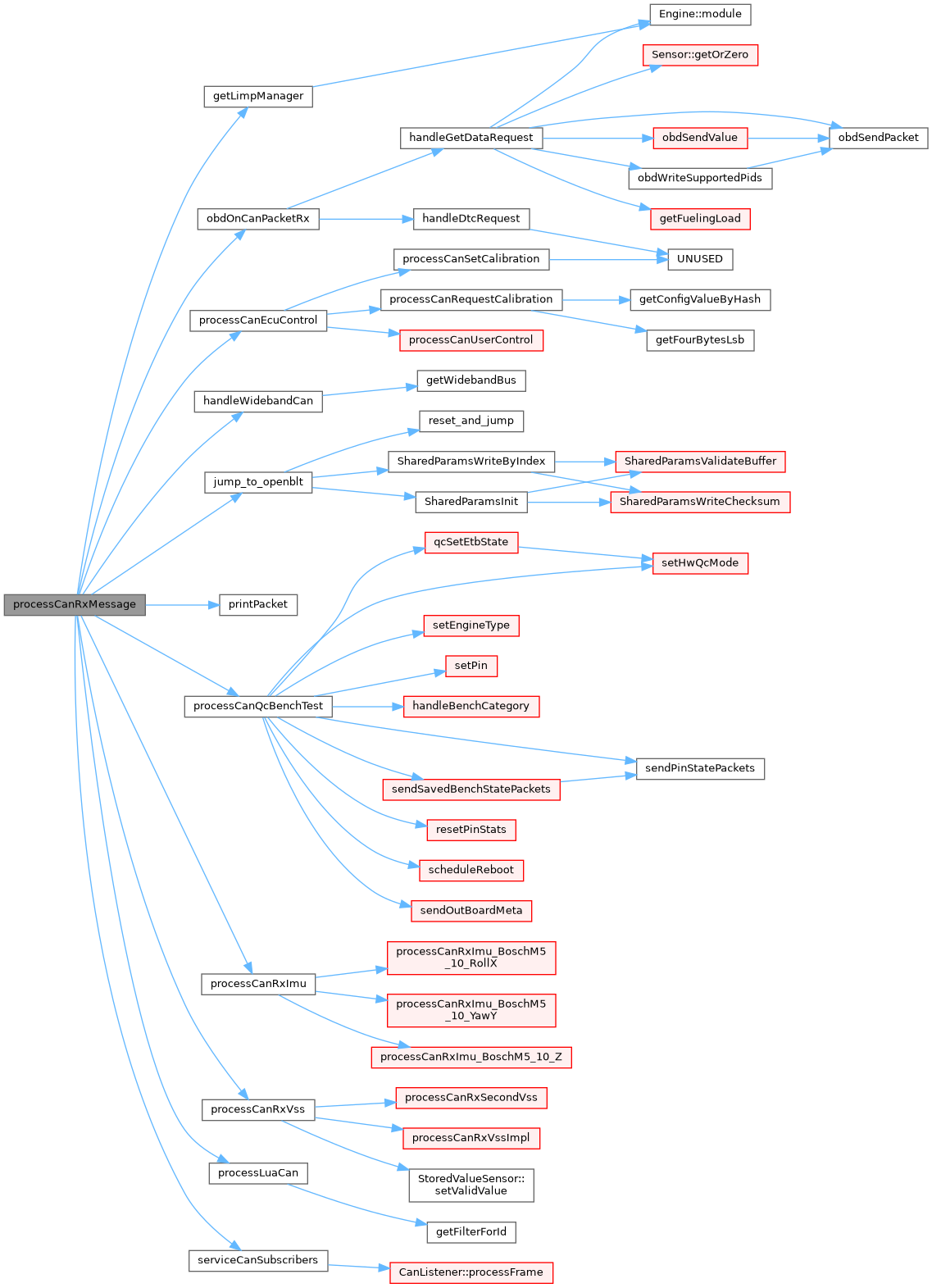
◆ processCanRxMessage()
| void processCanRxMessage | ( | const size_t | busIndex, |
| const CANRxFrame & | frame, | ||
| efitick_t | nowNt | ||
| ) |
Definition at line 227 of file can_rx.cpp.
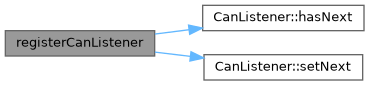
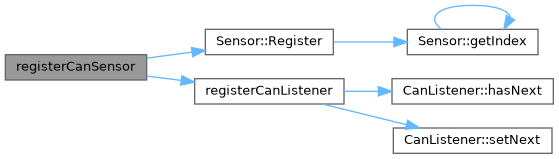
◆ registerCanListener()
| void registerCanListener | ( | CanListener & | listener | ) |
Definition at line 86 of file can_rx.cpp.
Referenced by CanTransport::init(), initCanGpioMsiobox(), IsoTpRx::IsoTpRx(), and registerCanSensor().

◆ registerCanSensor()
| void registerCanSensor | ( | CanSensorBase & | sensor | ) |
Definition at line 116 of file can_rx.cpp.
Referenced by initCanSensors(), initEgt(), and initLambda().

◆ serviceCanSubscribers()
| void serviceCanSubscribers | ( | const size_t | busIndex, |
| const CANRxFrame & | frame, | ||
| efitick_t | nowNt | ||
| ) |
Definition at line 71 of file can_rx.cpp.
Referenced by processCanRxMessage().


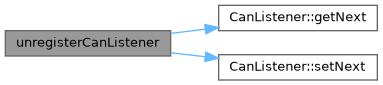
◆ unregisterCanListener()
| void unregisterCanListener | ( | CanListener & | listener | ) |
Definition at line 96 of file can_rx.cpp.
Referenced by IsoTpRx::~IsoTpRx().

Variable Documentation
◆ canListeners_head
| CanListener* canListeners_head = &tailSentinel |
Definition at line 69 of file can_rx.cpp.
Referenced by CanWrite::PeriodicTask(), registerCanListener(), serviceCanSubscribers(), and unregisterCanListener().
◆ custom_board_can_rx
| std::optional<board_can_rx_type> custom_board_can_rx |
Definition at line 225 of file can_rx.cpp.
Referenced by processCanRxMessage().
◆ tailSentinel
|
static |
Definition at line 68 of file can_rx.cpp.
◆ verboseRxCan
|
extern |
Definition at line 364 of file settings.cpp.
Referenced by enableOrDisable(), and processCanRxMessage().