#include <can_listener.h>
Public Member Functions | |
| CanListener (uint32_t id) | |
| CanListener * | processFrame (const size_t busIndex, const CANRxFrame &frame, efitick_t nowNt) |
| uint32_t | getId () |
| void | setNext (CanListener *next) |
| virtual CanListener * | request () |
| CanListener * | getNext () const |
| virtual bool | acceptFrame (const size_t busIndex, const CANRxFrame &frame) const |
Protected Member Functions | |
| virtual void | decodeFrame (const CANRxFrame &frame, efitick_t nowNt)=0 |
Private Attributes | |
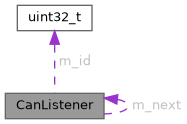
| CanListener * | m_next = nullptr |
| const uint32_t | m_id |
Detailed Description
Definition at line 12 of file can_listener.h.
Constructor & Destructor Documentation
◆ CanListener()
|
inline |
Definition at line 14 of file can_listener.h.
Member Function Documentation
◆ acceptFrame()
|
inlinevirtual |
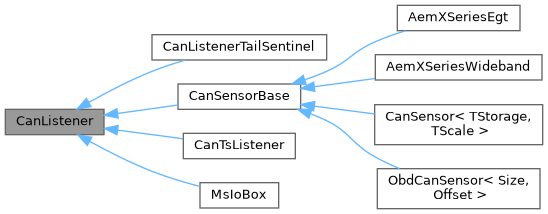
Reimplemented in AemXSeriesWideband.
Definition at line 46 of file can_listener.h.
Referenced by processFrame().

◆ decodeFrame()
|
protectedpure virtual |
Implemented in CanTsListener, IsoTpRx, CanSensor< TStorage, TScale >, ObdCanSensor< Size, Offset >, AemXSeriesEgt, and AemXSeriesWideband.
Referenced by processFrame().

◆ getId()
|
inline |
Definition at line 27 of file can_listener.h.
◆ getNext()
|
inline |
Definition at line 40 of file can_listener.h.
Referenced by registerCanListener(), request(), and unregisterCanListener().

◆ processFrame()
|
inline |
Definition at line 19 of file can_listener.h.
Referenced by serviceCanSubscribers().


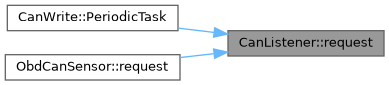
◆ request()
|
inlinevirtual |
Reimplemented in ObdCanSensor< Size, Offset >.
Definition at line 35 of file can_listener.h.
Referenced by CanWrite::PeriodicTask(), and ObdCanSensor< Size, Offset >::request().

◆ setNext()
|
inline |
Definition at line 31 of file can_listener.h.
Referenced by registerCanListener(), and unregisterCanListener().

Field Documentation
◆ m_id
|
private |
Definition at line 59 of file can_listener.h.
Referenced by acceptFrame(), and getId().
◆ m_next
|
private |
Definition at line 57 of file can_listener.h.
Referenced by getNext(), processFrame(), and setNext().
The documentation for this class was generated from the following file:
- controllers/can/can_listener.h