#include <isotp.h>
Inheritance diagram for IsoTpRx:
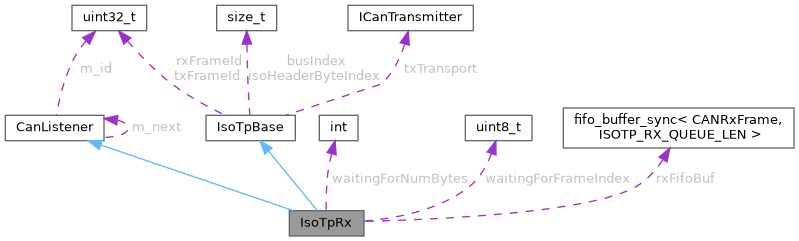
Collaboration diagram for IsoTpRx:
Public Member Functions | |
| IsoTpRx (size_t p_busIndex, uint32_t p_rxFrameId, uint32_t p_txFrameId) | |
| ~IsoTpRx () | |
| void | reset () |
| bool | isRxEmpty () |
| virtual void | decodeFrame (const CANRxFrame &frame, efitick_t nowNt) |
| int | readTimeout (uint8_t *rxbuf, size_t *size, sysinterval_t timeout) |
| void | resetRxVerbose () |
 Public Member Functions inherited from CanListener Public Member Functions inherited from CanListener | |
| CanListener (uint32_t id) | |
| CanListener * | processFrame (const size_t busIndex, const CANRxFrame &frame, efitick_t nowNt) |
| uint32_t | getId () |
| void | setNext (CanListener *next) |
| virtual CanListener * | request () |
| CanListener * | getNext () const |
| virtual bool | acceptFrame (const size_t busIndex, const CANRxFrame &frame) const |
| Public Member Functions inherited from IsoTpBase | |
| IsoTpBase (ICanTransmitter *p_txTransport, size_t p_busIndex, uint32_t p_rxFrameId, uint32_t p_txFrameId) | |
| int | sendFrame (const IsoTpFrameHeader &header, const uint8_t *data, int num, can_sysinterval_t timeout) |
| void | sendFlowControl (can_sysinterval_t timeout) |
| can_msg_t | transmit (CanTxMessage &ctfp, can_sysinterval_t timeout) |
Protected Attributes | |
| fifo_buffer_sync< CANRxFrame, ISOTP_RX_QUEUE_LEN > | rxFifoBuf |
Private Attributes | |
| int | waitingForNumBytes = 0 |
| uint8_t | waitingForFrameIndex = 0 |
Additional Inherited Members | |
| Data Fields inherited from IsoTpBase | |
| size_t | isoHeaderByteIndex = 0 |
| ICanTransmitter * | txTransport |
| size_t | busIndex |
| uint32_t | rxFrameId |
| uint32_t | txFrameId |
Detailed Description
Constructor & Destructor Documentation
◆ IsoTpRx()
|
inline |
Definition at line 180 of file isotp.h.
181 :
182 CanListener(p_rxFrameId),
184 {
185 // not cool: this would invoke ChibiOS meaning we have to be careful where instances are declared in order to avoid
186 // initialization too soon
187 // todo: https://github.com/rusefi/rusefi/issues/8938
188 rxFifoBuf.clear();
190 }
Definition can_listener.h:12
Definition isotp.h:87
fifo_buffer_sync< CANRxFrame, ISOTP_RX_QUEUE_LEN > rxFifoBuf
Definition isotp.h:235
Here is the call graph for this function:

◆ ~IsoTpRx()
|
inline |

Member Function Documentation
◆ decodeFrame()
|
inlinevirtual |
Implements CanListener.
Definition at line 207 of file isotp.h.
208 {
210 // invalid++;
211 return;
212 }
213
216 return;
217 }
218 }
219
221 // overruns++;
222 }
223 }
◆ isRxEmpty()
|
inline |
◆ readTimeout()
| int IsoTpRx::readTimeout | ( | uint8_t * | rxbuf, |
| size_t * | size, | ||
| sysinterval_t | timeout | ||
| ) |
Definition at line 367 of file isotp.cpp.
368{
369 //is fxbuf is too small?
370 bool overflow = false;
371 bool isFirstFrame = true;
373 uint8_t *buf = rxbuf;
374
375 do {
376 CANRxFrame rxmsg;
377
378 // TODO: adjust timeout!
380 // TODO: error codes
381 if (isFirstFrame) {
382 // this is not an error
383 //efiPrintf("IsoTp: rx timeout, nothing received");
384 *size = 0;
385 return 0;
386 }
387
389 *size = buf - rxbuf;
390 return -1;
391 }
392
395 efiPrintf("receiveFrame frameType=%d", frameType);
396 #if EFI_PROD_CODE
397 printCANRxFrame(-1, rxmsg);
398 #endif // EFI_PROD_CODE
399 }
400 size_t numBytesAvailable;
401 uint8_t frameIdx;
402 const uint8_t *srcBuf;
403 switch (frameType) {
405 // TODO: check that this is first packet! see isFirstFrame
407 waitingForNumBytes = numBytesAvailable;
409 break;
411 // TODO: check that this is first packet! see isFirstFrame
412 waitingForNumBytes = ((rxmsg.data8[isoHeaderByteIndex] & 0xf) << 8) | rxmsg.data8[isoHeaderByteIndex + 1];
413 waitingForFrameIndex = 1;
416// rxTransport->onTpFirstFrame(); // used to send flow control message
417 break;
421 // Should not happen
422 return -4;
423 }
425 // todo: that's an abnormal situation, and we probably should react?
426 // TODO: error codes
427 efiPrintf("received frame index %d is not what expected %d",
428 frameIdx, waitingForFrameIndex);
429 return -2;
430 }
434 break;
436 // todo: currently we just ignore the FC frame
437 // TODO: we should not receive FC frame while receiving data
438 break;
439 default:
440 // bad frame type
441 // TODO: error codes
442 return -3;
443 }
444
445 if (isFirstFrame) {
448 }
449 isFirstFrame = false;
450 }
451
452 if (buf != nullptr) {
453 int numBytesToCopy = minI(availableAtBuffer, numBytesAvailable);
454
455 memcpy(buf, srcBuf, numBytesToCopy);
456 buf += numBytesToCopy;
457 availableAtBuffer -= numBytesToCopy;
458
459 // if there are some more bytes left, receive and drop
460 if (numBytesAvailable > numBytesToCopy) {
461 overflow = true;
462 }
463 }
464
465 // according to the specs, we need to acknowledge the received multi-frame start frame
467 sendFlowControl(timeout);
468 }
469
470 waitingForNumBytes -= numBytesAvailable;
472
473 // received size
474 *size = buf - rxbuf;
475
476 return overflow ? 1 : 0;
477}
void printCANRxFrame(const size_t busIndex, const CANRxFrame &rx)
Definition can_rx.cpp:29
static constexpr engine_configuration_s * engineConfiguration
Definition engine_configuration.h:80
Definition can_mocks.h:36
bool verboseIsoTp
Here is the call graph for this function:

◆ reset()
|
inline |
◆ resetRxVerbose()
| void IsoTpRx::resetRxVerbose | ( | ) |
Definition at line 479 of file isotp.cpp.
479 {
480#if EFI_PROD_CODE || SIMULATOR
481 CANRxFrame rxmsg;
482
485 }
486#endif
487
488 waitingForNumBytes = 0;
489 waitingForFrameIndex = 0;
490}
Here is the call graph for this function:

Field Documentation
◆ rxFifoBuf
|
protected |
Definition at line 235 of file isotp.h.
Referenced by decodeFrame(), IsoTpRx(), isRxEmpty(), readTimeout(), reset(), resetRxVerbose(), and IsoTpRxTx::writeTimeout().
◆ waitingForFrameIndex
|
private |
Definition at line 232 of file isotp.h.
Referenced by readTimeout(), reset(), and resetRxVerbose().
◆ waitingForNumBytes
|
private |
Definition at line 231 of file isotp.h.
Referenced by readTimeout(), reset(), and resetRxVerbose().
The documentation for this class was generated from the following files: