#include <can_sensor.h>
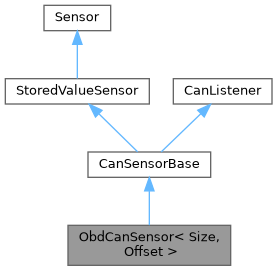
Inheritance diagram for ObdCanSensor< Size, Offset >:
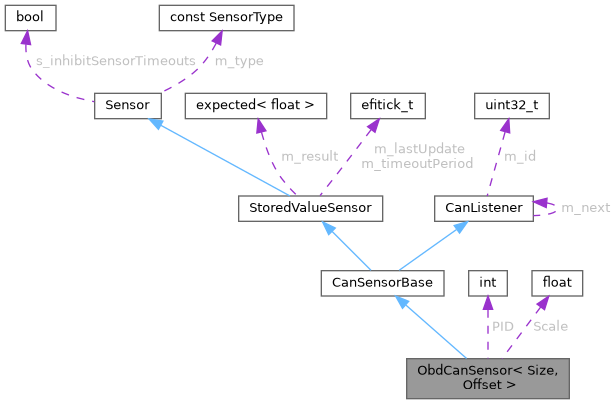
Collaboration diagram for ObdCanSensor< Size, Offset >:
Public Member Functions | |
| ObdCanSensor (int p_PID, float p_Scale, SensorType type) | |
| void | decodeFrame (const CANRxFrame &frame, efitick_t nowNt) override |
| CanListener * | request () override |
 Public Member Functions inherited from CanSensorBase Public Member Functions inherited from CanSensorBase | |
| CanSensorBase (uint32_t eid, SensorType type, efidur_t timeout) | |
| void | showInfo (const char *sensorName) const override |
| Public Member Functions inherited from StoredValueSensor | |
| SensorResult | get () const final override |
| StoredValueSensor (SensorType type, efidur_t timeoutNt) | |
| void | invalidate () |
| void | invalidate (UnexpectedCode why) |
| void | setValidValue (float value, efitick_t timestamp) |
| void | showInfo (const char *sensorName) const override |
| virtual void | setTimeout (int timeoutMs) |
| Public Member Functions inherited from Sensor | |
| bool | Register () |
| const char * | getSensorName () const |
| virtual bool | hasSensor () const |
| virtual float | getRaw () const |
| virtual bool | isRedundant () const |
| void | unregister () |
| SensorType | type () const |
| Public Member Functions inherited from CanListener | |
| CanListener (uint32_t id) | |
| CanListener * | processFrame (const size_t busIndex, const CANRxFrame &frame, efitick_t nowNt) |
| uint32_t | getId () |
| void | setNext (CanListener *next) |
| CanListener * | getNext () const |
| virtual bool | acceptFrame (const size_t busIndex, const CANRxFrame &frame) const |
Data Fields | |
| int | PID |
| float | Scale |
Additional Inherited Members | |
| Static Public Member Functions inherited from Sensor | |
| static void | showAllSensorInfo () |
| static void | showInfo (SensorType type) |
| static void | resetRegistry () |
| static const Sensor * | getSensorOfType (SensorType type) |
| static SensorResult | get (SensorType type) |
| static float | getOrZero (SensorType type) |
| static float | getRaw (SensorType type) |
| static bool | isRedundant (SensorType type) |
| static bool | hasSensor (SensorType type) |
| static void | setMockValue (SensorType type, float value, bool mockRedundant=false) |
| static void | setInvalidMockValue (SensorType type) |
| static void | resetMockValue (SensorType type) |
| static void | resetAllMocks () |
| static void | inhibitTimeouts (bool inhibit) |
| static const char * | getSensorName (SensorType type) |
| Protected Member Functions inherited from Sensor | |
| Sensor (SensorType type) | |
| Static Protected Attributes inherited from Sensor | |
| static bool | s_inhibitSensorTimeouts = false |
Detailed Description
template<int Size, int Offset>
class ObdCanSensor< Size, Offset >
class ObdCanSensor< Size, Offset >
Definition at line 59 of file can_sensor.h.
Constructor & Destructor Documentation
◆ ObdCanSensor()
template<int Size, int Offset>
|
inline |
Definition at line 61 of file can_sensor.h.
Member Function Documentation
◆ decodeFrame()
template<int Size, int Offset>
|
inlineoverridevirtual |
Implements CanListener.
Definition at line 67 of file can_sensor.h.
67 {
69 return;
70 }
71
72 int iValue;
73 if (Size == 2) {
75 } else {
76 iValue = frame.data8[3];
77 }
78
80 setValidValue(fValue, nowNt);
81 }
void setValidValue(float value, efitick_t timestamp)
Definition stored_value_sensor.h:72
Here is the call graph for this function:

◆ request()
template<int Size, int Offset>
|
inlineoverridevirtual |
Reimplemented from CanListener.
Definition at line 83 of file can_sensor.h.
83 {
84 {
86 msg[0] = _OBD_2;
87 msg[1] = OBD_CURRENT_DATA;
88 msg[2] = PID;
89 }
90 // let's sleep on write update after each OBD request, this would give read thread a chance to read response
91 // todo: smarter logic of all this with with semaphore not just sleep
92 chThdSleepMilliseconds(300);
94 }
@ OBD
Definition can_msg_tx.h:32
Here is the call graph for this function:

Field Documentation
◆ PID
template<int Size, int Offset>
| int ObdCanSensor< Size, Offset >::PID |
Definition at line 96 of file can_sensor.h.
Referenced by ObdCanSensor< Size, Offset >::decodeFrame(), ObdCanSensor< Size, Offset >::ObdCanSensor(), and ObdCanSensor< Size, Offset >::request().
◆ Scale
template<int Size, int Offset>
| float ObdCanSensor< Size, Offset >::Scale |
Definition at line 97 of file can_sensor.h.
Referenced by ObdCanSensor< Size, Offset >::decodeFrame(), and ObdCanSensor< Size, Offset >::ObdCanSensor().
The documentation for this class was generated from the following file:
- controllers/sensors/can_sensor.h