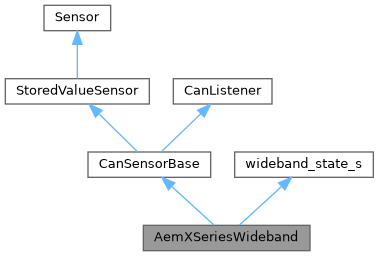
#include <AemXSeriesLambda.h>
Public Member Functions | |
| AemXSeriesWideband (uint8_t sensorIndex, SensorType type) | |
| bool | acceptFrame (const size_t busIndex, const CANRxFrame &frame) const override final |
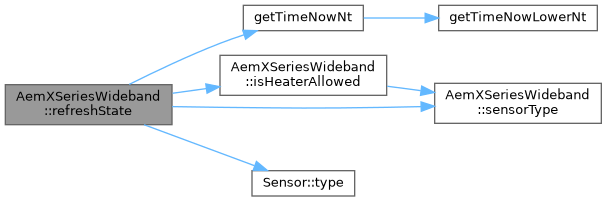
| void | refreshState (void) |
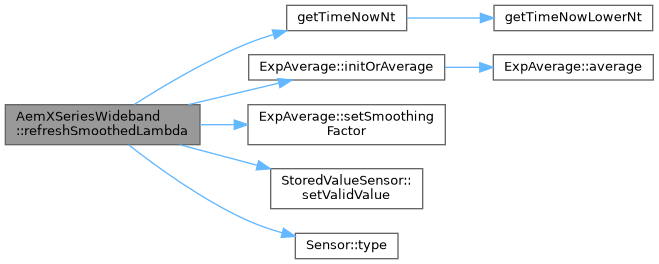
| void | refreshSmoothedLambda (float lambda) |
 Public Member Functions inherited from CanSensorBase Public Member Functions inherited from CanSensorBase | |
| CanSensorBase (uint32_t eid, SensorType type, efidur_t timeout) | |
| void | showInfo (const char *sensorName) const override |
| Public Member Functions inherited from StoredValueSensor | |
| SensorResult | get () const final override |
| StoredValueSensor (SensorType type, efidur_t timeoutNt) | |
| void | invalidate () |
| void | invalidate (UnexpectedCode why) |
| void | setValidValue (float value, efitick_t timestamp) |
| void | showInfo (const char *sensorName) const override |
| virtual void | setTimeout (int timeoutMs) |
| Public Member Functions inherited from Sensor | |
| bool | Register () |
| const char * | getSensorName () const |
| virtual bool | hasSensor () const |
| virtual float | getRaw () const |
| virtual bool | isRedundant () const |
| void | unregister () |
| SensorType | type () const |
| Public Member Functions inherited from CanListener | |
| CanListener (uint32_t id) | |
| CanListener * | processFrame (const size_t busIndex, const CANRxFrame &frame, efitick_t nowNt) |
| uint32_t | getId () |
| void | setNext (CanListener *next) |
| virtual CanListener * | request () |
| CanListener * | getNext () const |
Protected Member Functions | |
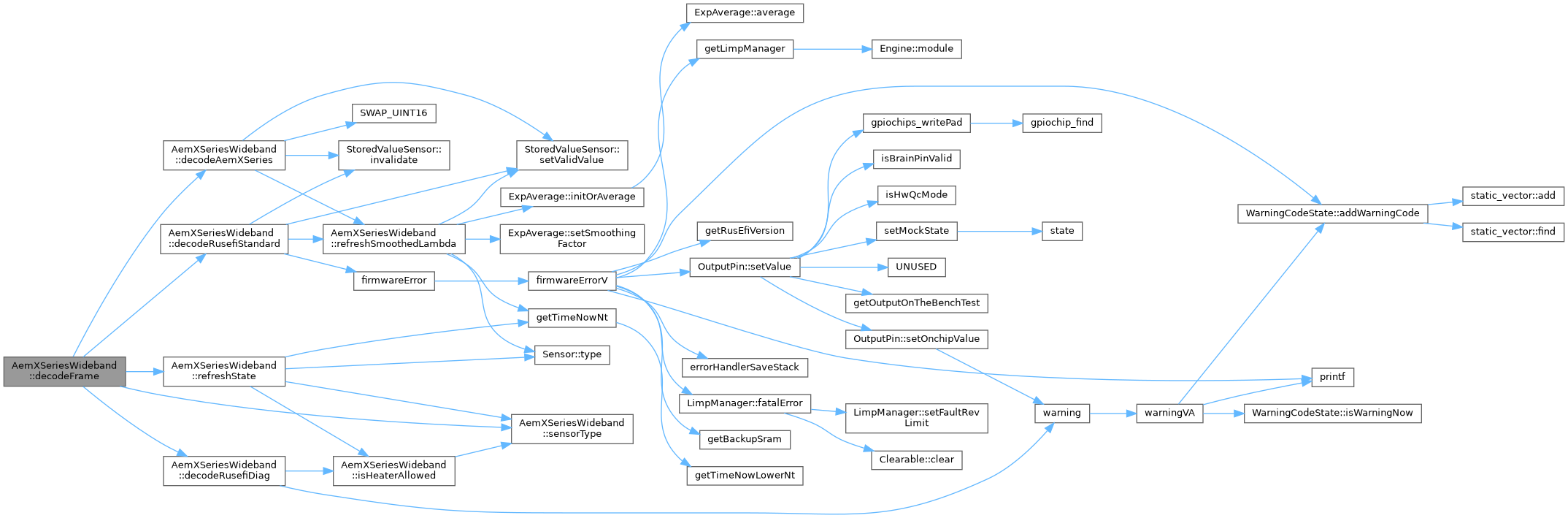
| void | decodeFrame (const CANRxFrame &frame, efitick_t nowNt) override |
| bool | decodeAemXSeries (const CANRxFrame &frame, efitick_t nowNt) |
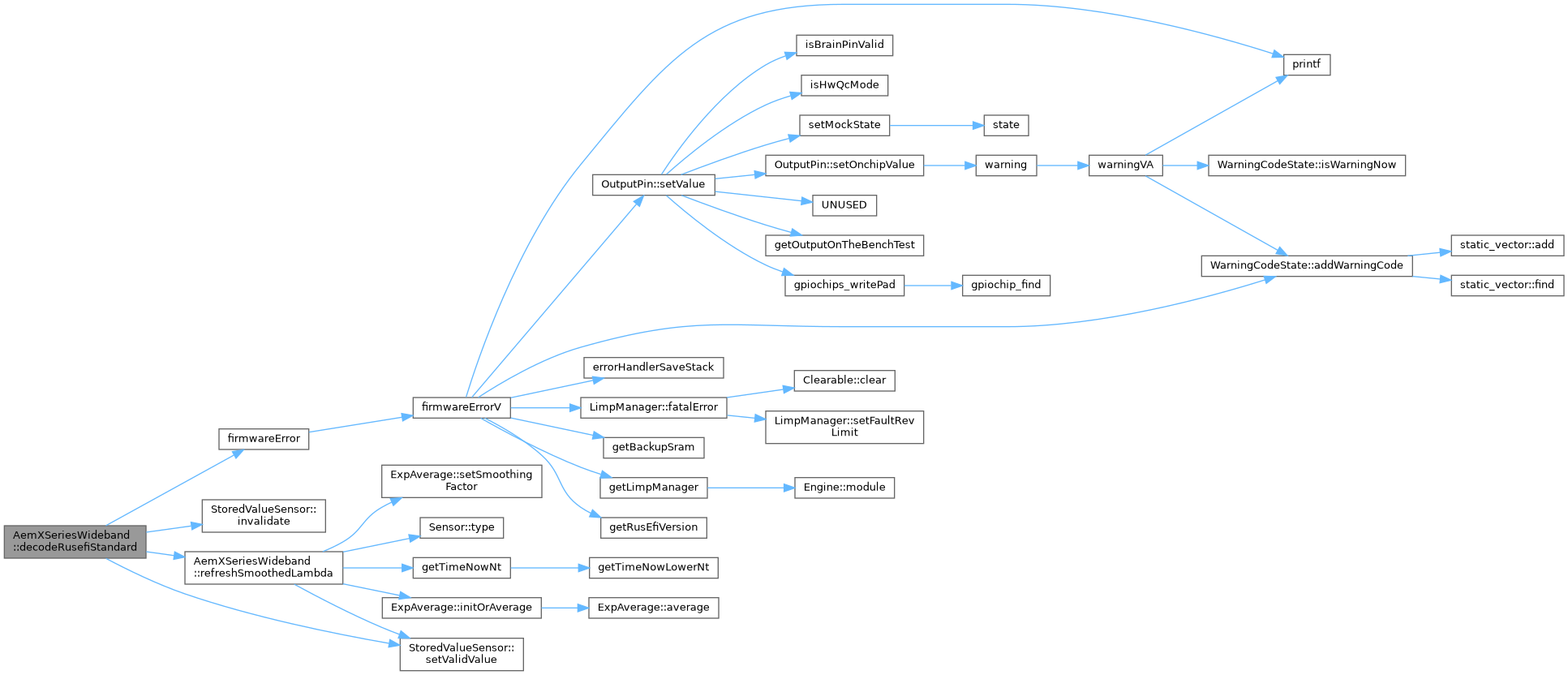
| bool | decodeRusefiStandard (const CANRxFrame &frame, efitick_t nowNt) |
| void | decodeRusefiDiag (const CANRxFrame &frame) |
| Protected Member Functions inherited from Sensor | |
| Sensor (SensorType type) | |
Private Member Functions | |
| can_wbo_type_e | sensorType () const |
| uint32_t | getReCanId () const |
| uint32_t | getAemCanId () const |
| bool | isHeaterAllowed () |
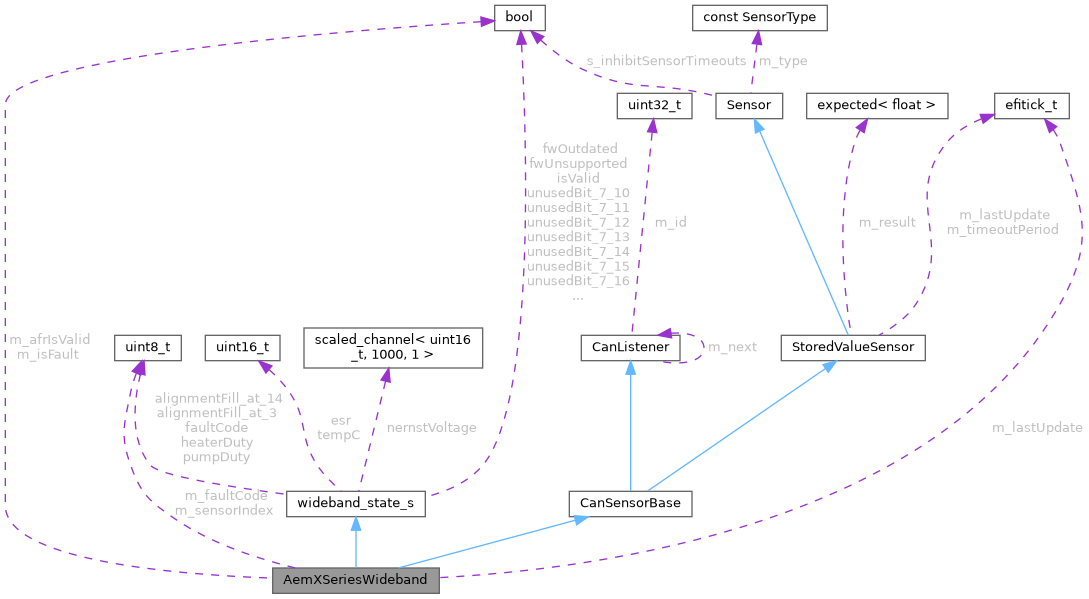
Private Attributes | |
| const uint8_t | m_sensorIndex |
| uint8_t | m_stateCode |
| bool | m_afrIsValid |
| bool | m_isFault |
| efitick_t | m_lastUpdate = 0 |
Additional Inherited Members | |
| Static Public Member Functions inherited from Sensor | |
| static void | showAllSensorInfo () |
| static void | showInfo (SensorType type) |
| static void | resetRegistry () |
| static const Sensor * | getSensorOfType (SensorType type) |
| static SensorResult | get (SensorType type) |
| static float | getOrZero (SensorType type) |
| static float | getRaw (SensorType type) |
| static bool | isRedundant (SensorType type) |
| static bool | hasSensor (SensorType type) |
| static void | setMockValue (SensorType type, float value, bool mockRedundant=false) |
| static void | setInvalidMockValue (SensorType type) |
| static void | resetMockValue (SensorType type) |
| static void | resetAllMocks () |
| static void | inhibitTimeouts (bool inhibit) |
| static const char * | getSensorName (SensorType type) |
| Static Protected Attributes inherited from Sensor | |
| static bool | s_inhibitSensorTimeouts = false |
Detailed Description
Definition at line 16 of file AemXSeriesLambda.h.
Constructor & Destructor Documentation
◆ AemXSeriesWideband()
| AemXSeriesWideband::AemXSeriesWideband | ( | uint8_t | sensorIndex, |
| SensorType | type | ||
| ) |
Definition at line 14 of file AemXSeriesLambda.cpp.
Member Function Documentation
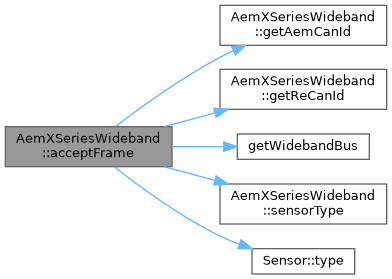
◆ acceptFrame()
|
finaloverridevirtual |
Reimplemented from CanListener.
Definition at line 44 of file AemXSeriesLambda.cpp.
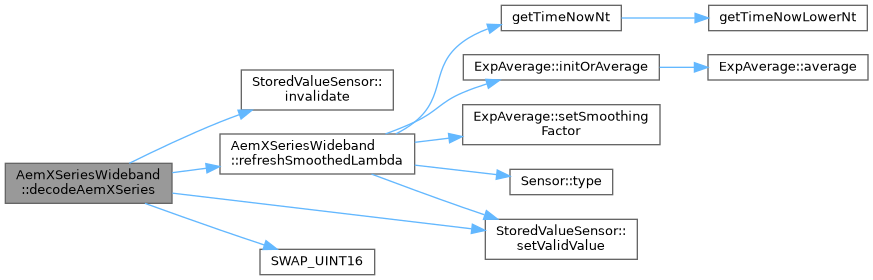
◆ decodeAemXSeries()
|
protected |
- Returns
- true if valid, false if invalid
Definition at line 164 of file AemXSeriesLambda.cpp.
Referenced by decodeFrame().

◆ decodeFrame()
|
overrideprotectedvirtual |
Implements CanListener.
Definition at line 133 of file AemXSeriesLambda.cpp.
◆ decodeRusefiDiag()
|
protected |
Definition at line 241 of file AemXSeriesLambda.cpp.
Referenced by decodeFrame().


◆ decodeRusefiStandard()
|
protected |
Definition at line 188 of file AemXSeriesLambda.cpp.
Referenced by decodeFrame().

◆ getAemCanId()
|
private |
Definition at line 39 of file AemXSeriesLambda.cpp.
Referenced by acceptFrame().

◆ getReCanId()
|
private |
Definition at line 34 of file AemXSeriesLambda.cpp.
Referenced by acceptFrame().

◆ isHeaterAllowed()
|
private |
Definition at line 78 of file AemXSeriesLambda.cpp.
Referenced by decodeRusefiDiag(), and refreshState().


◆ refreshSmoothedLambda()
| void AemXSeriesWideband::refreshSmoothedLambda | ( | float | lambda | ) |
Definition at line 224 of file AemXSeriesLambda.cpp.
Referenced by decodeAemXSeries(), and decodeRusefiStandard().

◆ refreshState()
| void AemXSeriesWideband::refreshState | ( | void | ) |
Definition at line 82 of file AemXSeriesLambda.cpp.
Referenced by decodeFrame(), and getLiveData().
◆ sensorType()
|
private |
Definition at line 30 of file AemXSeriesLambda.cpp.
Referenced by acceptFrame(), decodeFrame(), isHeaterAllowed(), and refreshState().
Field Documentation
◆ hasSeenRx
| bool AemXSeriesWideband::hasSeenRx = false |
Definition at line 26 of file AemXSeriesLambda.h.
Referenced by decodeFrame(), and uaefi_slowCallback().
◆ m_afrIsValid
|
private |
Definition at line 49 of file AemXSeriesLambda.h.
Referenced by AemXSeriesWideband(), decodeAemXSeries(), decodeRusefiStandard(), and refreshState().
◆ m_isFault
|
private |
Definition at line 51 of file AemXSeriesLambda.h.
Referenced by AemXSeriesWideband(), decodeAemXSeries(), and refreshState().
◆ m_lastUpdate
|
private |
Definition at line 53 of file AemXSeriesLambda.h.
Referenced by decodeFrame(), and refreshState().
◆ m_sensorIndex
|
private |
Definition at line 45 of file AemXSeriesLambda.h.
Referenced by decodeRusefiDiag(), decodeRusefiStandard(), getAemCanId(), getReCanId(), and sensorType().
◆ m_stateCode
|
private |
Definition at line 47 of file AemXSeriesLambda.h.
Referenced by AemXSeriesWideband(), decodeRusefiDiag(), and refreshState().
The documentation for this class was generated from the following files:
- controllers/sensors/impl/AemXSeriesLambda.h
- controllers/sensors/impl/AemXSeriesLambda.cpp