Functions | |
| void | obdSendPacket (int mode, int PID, int numBytes, uint32_t iValue, size_t busIndex) |
| static void | obdSendValue (int mode, int PID, int numBytes, float value, size_t busIndex) |
| void | obdWriteSupportedPids (int PID, int bitOffset, const int16_t *supportedPids, size_t busIndex) |
| void | handleGetDataRequest (const CANRxFrame &rx, size_t busIndex) |
| static void | handleDtcRequest (int numCodes, ObdCode *dtcCode) |
| void | obdOnCanPacketRx (const CANRxFrame &rx, size_t busIndex) |
Variables | |
| static const int16_t | supportedPids0120 [] |
| static const int16_t | supportedPids2140 [] |
| static const int16_t | supportedPids4160 [] |
Function Documentation
◆ handleDtcRequest()
|
static |
Definition at line 195 of file obd2.cpp.
195 {
196 // TODO: this appears to be unfinished?
197 UNUSED(numCodes);
198 UNUSED(dtcCode);
199
200 // int numBytes = numCodes * 2;
201 // // write CAN-TP Single Frame header?
202 // txmsg.data8[0] = (uint8_t)((0 << 4) | numBytes);
203 // for (int i = 0, j = 1; i < numCodes; i++) {
204 // txmsg.data8[j++] = (uint8_t)((dtcCode[i] >> 8) & 0xff);
205 // txmsg.data8[j++] = (uint8_t)(dtcCode[i] & 0xff);
206 // }
207}
UNUSED(samplingTimeSeconds)
Referenced by obdOnCanPacketRx().
Here is the call graph for this function:

Here is the caller graph for this function:

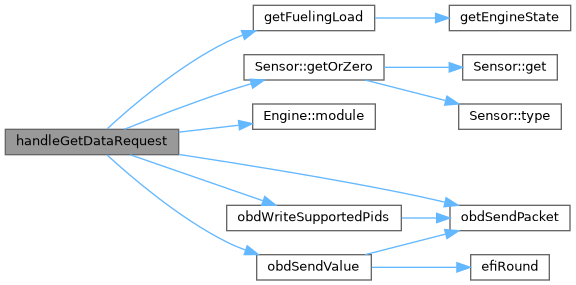
◆ handleGetDataRequest()
| void handleGetDataRequest | ( | const CANRxFrame & | rx, |
| size_t | busIndex | ||
| ) |
Definition at line 106 of file obd2.cpp.
106 {
108 switch (pid) {
109 case PID_SUPPORTED_PIDS_REQUEST_01_20:
111 break;
112 case PID_SUPPORTED_PIDS_REQUEST_21_40:
114 break;
115 case PID_SUPPORTED_PIDS_REQUEST_41_60:
117 break;
118 case PID_MONITOR_STATUS:
120 break;
121 case PID_FUEL_SYSTEM_STATUS:
122 // todo: add statuses
123 obdSendValue(_1_MODE, pid, 2, (2<<8)|(0), busIndex); // 2 = "Closed loop, using oxygen sensor feedback to determine fuel mix"
124 break;
125 case PID_ENGINE_LOAD:
127 break;
128 case PID_COOLANT_TEMP:
130 break;
131 case PID_STFT_BANK1:
133 break;
134 case PID_STFT_BANK2:
136 break;
137 case PID_INTAKE_MAP:
139 break;
140 case PID_RPM:
141 obdSendValue(_1_MODE, pid, 2, Sensor::getOrZero(SensorType::Rpm) * ODB_RPM_MULT, busIndex); // rotation/min. (A*256+B)/4
142 break;
143 case PID_SPEED:
145 break;
146 case PID_TIMING_ADVANCE: {
148 timing = (timing > 360.0f) ? (timing - 720.0f) : timing;
150 break;
151 }
152 case PID_INTAKE_TEMP:
154 break;
155 case PID_INTAKE_MAF:
156 obdSendValue(_1_MODE, pid, 2, Sensor::getOrZero(SensorType::Maf) * 100.0f, busIndex); // grams/sec (A*256+B)/100
157 break;
158 case PID_THROTTLE:
159 obdSendValue(_1_MODE, pid, 1, Sensor::getOrZero(SensorType::Tps1) * ODB_TPS_BYTE_PERCENT, busIndex); // (A*100/255)
160 break;
161 case PID_FUEL_AIR_RATIO_1: {
163
164 uint16_t scaled = lambda * 32768;
165
166 obdSendPacket(1, pid, 4, scaled << 16, busIndex);
167 break;
168 } case PID_FUEL_RATE: {
169
170#ifdef MODULE_ODOMETER
172#else
173 float gPerSecond = 0;
174#endif // MODULE_ODOMETER
175
176 float gPerHour = gPerSecond * 3600;
177 float literPerHour = gPerHour * 0.00139f;
179 break;
180 } case PID_CONTROL_UNIT_VOLTAGE: {
182 break;
183 } case PID_ETHANOL: {
184 obdSendValue(_1_MODE, pid, 1, (255.0f / 100) * Sensor::getOrZero(SensorType::FuelEthanolPercent), busIndex);
185 break;
186 } case PID_OIL_TEMPERATURE: {
187 obdSendValue(_1_MODE, pid, 1, Sensor::getOrZero(SensorType::OilTemperature) + ODB_TEMP_EXTRA, busIndex);
188 break;
189 } default:
190 // ignore unhandled PIDs
191 break;
192 }
193}
Definition trip_odometer.h:3
void obdSendPacket(int mode, int PID, int numBytes, uint32_t iValue, size_t busIndex)
Definition obd2.cpp:62
static void obdSendValue(int mode, int PID, int numBytes, float value, size_t busIndex)
Definition obd2.cpp:81
void obdWriteSupportedPids(int PID, int bitOffset, const int16_t *supportedPids, size_t busIndex)
Definition obd2.cpp:92
@ FuelEthanolPercent
@ BatteryVoltage
@ Iat
@ Map
@ Lambda1
@ OilTemperature
@ VehicleSpeed
@ Clt
@ Maf
@ Rpm
@ Tps1
float stftCorrection[FT_BANK_COUNT]
Definition engine_state_generated.h:416
Referenced by obdOnCanPacketRx().
Here is the call graph for this function:
Here is the caller graph for this function:

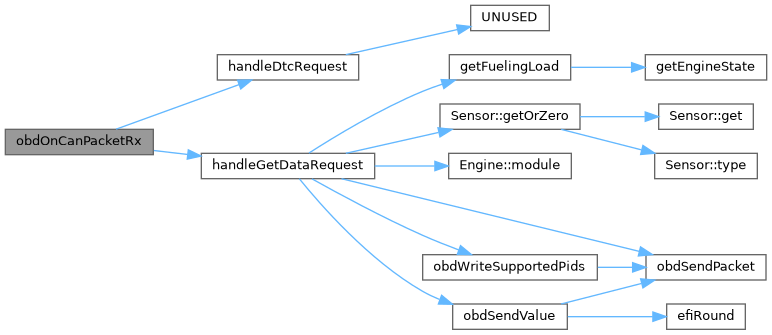
◆ obdOnCanPacketRx()
| void obdOnCanPacketRx | ( | const CANRxFrame & | rx, |
| size_t | busIndex | ||
| ) |
Definition at line 210 of file obd2.cpp.
210 {
211 if (CAN_SID(rx) != OBD_TEST_REQUEST) {
212 return;
213 }
214
216 handleGetDataRequest(rx, busIndex);
218 // todo: implement stored/pending difference?
221 // todo: implement stored/pending difference?
223 }
224}
void handleGetDataRequest(const CANRxFrame &rx, size_t busIndex)
Definition obd2.cpp:106
Referenced by processCanRxMessage().
Here is the call graph for this function:
Here is the caller graph for this function:

◆ obdSendPacket()
| void obdSendPacket | ( | int | mode, |
| int | PID, | ||
| int | numBytes, | ||
| uint32_t | iValue, | ||
| size_t | busIndex | ||
| ) |
Definition at line 62 of file obd2.cpp.
62 {
64
65 // Respond on the same bus we got the request from
66 resp.busIndex = busIndex;
67
68 // write number of bytes
69 resp[0] = (uint8_t)(2 + numBytes);
70 // write 2 bytes of header
71 resp[1] = (uint8_t)(0x40 + mode);
72 resp[2] = (uint8_t)PID;
73 // write N data bytes
74 for (int i = 8 * (numBytes - 1), j = 3; i >= 0; i -= 8, j++) {
75 resp[j] = (uint8_t)((iValue >> i) & 0xff);
76 }
77}
@ OBD
Definition can_msg_tx.h:32
Referenced by handleGetDataRequest(), obdSendValue(), and obdWriteSupportedPids().
Here is the caller graph for this function:

◆ obdSendValue()
Definition at line 81 of file obd2.cpp.
81 {
84 // clamp to uint8_t (0..255) or uint16_t (0..65535)
85 iValue = maxI(minI(iValue, (numBytes == 1) ? 255 : 65535), 0);
86 obdSendPacket(mode, PID, numBytes, iValue, busIndex);
87}
@ CUSTOM_ERR_6662
Referenced by handleGetDataRequest().
Here is the call graph for this function:
Here is the caller graph for this function:

◆ obdWriteSupportedPids()
| void obdWriteSupportedPids | ( | int | PID, |
| int | bitOffset, | ||
| const int16_t * | supportedPids, | ||
| size_t | busIndex | ||
| ) |
Definition at line 92 of file obd2.cpp.
92 {
93 uint32_t value = 0;
94 // gather all 32 bit fields
95 for (int i = 0; i < 32 && supportedPids[i] > 0; i++)
96 value |= 1 << (31 + bitOffset - supportedPids[i]);
97
98#ifdef MOCK_SUPPORTED_PIDS
99 // for OBD debug
100 value = MOCK_SUPPORTED_PIDS;
101#endif
102
103 obdSendPacket(1, PID, 4, value, busIndex);
104}
Referenced by handleGetDataRequest().
Here is the call graph for this function:

Here is the caller graph for this function:

Variable Documentation
◆ supportedPids0120
|
static |
Initial value:
= {
PID_MONITOR_STATUS,
PID_FUEL_SYSTEM_STATUS,
PID_ENGINE_LOAD,
PID_COOLANT_TEMP,
PID_STFT_BANK1,
PID_STFT_BANK2,
PID_INTAKE_MAP,
PID_RPM,
PID_SPEED,
PID_TIMING_ADVANCE,
PID_INTAKE_TEMP,
PID_THROTTLE,
-1
}
Definition at line 33 of file obd2.cpp.
33 {
34 PID_MONITOR_STATUS,
35 PID_FUEL_SYSTEM_STATUS,
36 PID_ENGINE_LOAD,
37 PID_COOLANT_TEMP,
38 PID_STFT_BANK1,
39 PID_STFT_BANK2,
40 PID_INTAKE_MAP,
41 PID_RPM,
42 PID_SPEED,
43 PID_TIMING_ADVANCE,
44 PID_INTAKE_TEMP,
45 PID_THROTTLE,
46 -1
47};
Referenced by handleGetDataRequest().
◆ supportedPids2140
|
static |
Initial value:
= {
PID_FUEL_AIR_RATIO_1,
-1
}
Definition at line 49 of file obd2.cpp.
49 {
50 PID_FUEL_AIR_RATIO_1,
51 -1
52};
Referenced by handleGetDataRequest().
◆ supportedPids4160
|
static |
Initial value:
= {
PID_CONTROL_UNIT_VOLTAGE,
PID_ETHANOL,
PID_FUEL_RATE,
PID_OIL_TEMPERATURE,
-1
}
Definition at line 54 of file obd2.cpp.
54 {
55 PID_CONTROL_UNIT_VOLTAGE,
56 PID_ETHANOL,
57 PID_FUEL_RATE,
58 PID_OIL_TEMPERATURE,
59 -1
60};
Referenced by handleGetDataRequest().