Typedefs | |
| using | setup_custom_board_overrides_type = void(*)() |
| using | setup_custom_board_config_type = void(*)(engine_configuration_s *) |
| using | setup_custom_board_output_type = int(*)() |
| using | setup_custom_board_engine_type_type = void(*)(engine_type_e) |
| using | custom_validate_config_type = bool(*)() |
| using | setup_custom_board_ts_command_override_type = void(*)(uint16_t, uint16_t) |
| using | board_can_rx_type = void(*)(const size_t, const CANRxFrame &, efitick_t) |
| using | board_can_update_dash_type = void(*)(CanCycle cycle) |
Functions | |
| template<typename FuncType , typename... Args> | |
| static bool | call_board_override (std::optional< FuncType > board_override, Args &&... args) |
Typedef Documentation
◆ board_can_rx_type
| using board_can_rx_type = void (*)(const size_t, const CANRxFrame &, efitick_t) |
Definition at line 44 of file board_overrides.h.
◆ board_can_update_dash_type
| using board_can_update_dash_type = void (*)(CanCycle cycle) |
Definition at line 47 of file board_overrides.h.
◆ custom_validate_config_type
| using custom_validate_config_type = bool (*)() |
Definition at line 37 of file board_overrides.h.
◆ setup_custom_board_config_type
| using setup_custom_board_config_type = void (*)(engine_configuration_s * ) |
Definition at line 32 of file board_overrides.h.
◆ setup_custom_board_engine_type_type
| using setup_custom_board_engine_type_type = void (*)(engine_type_e) |
Definition at line 34 of file board_overrides.h.
◆ setup_custom_board_output_type
| using setup_custom_board_output_type = int (*)() |
Definition at line 33 of file board_overrides.h.
◆ setup_custom_board_overrides_type
| using setup_custom_board_overrides_type = void (*)() |
Definition at line 31 of file board_overrides.h.
◆ setup_custom_board_ts_command_override_type
| using setup_custom_board_ts_command_override_type = void (*)(uint16_t , uint16_t ) |
Definition at line 39 of file board_overrides.h.
Function Documentation
◆ call_board_override()
|
inlinestatic |
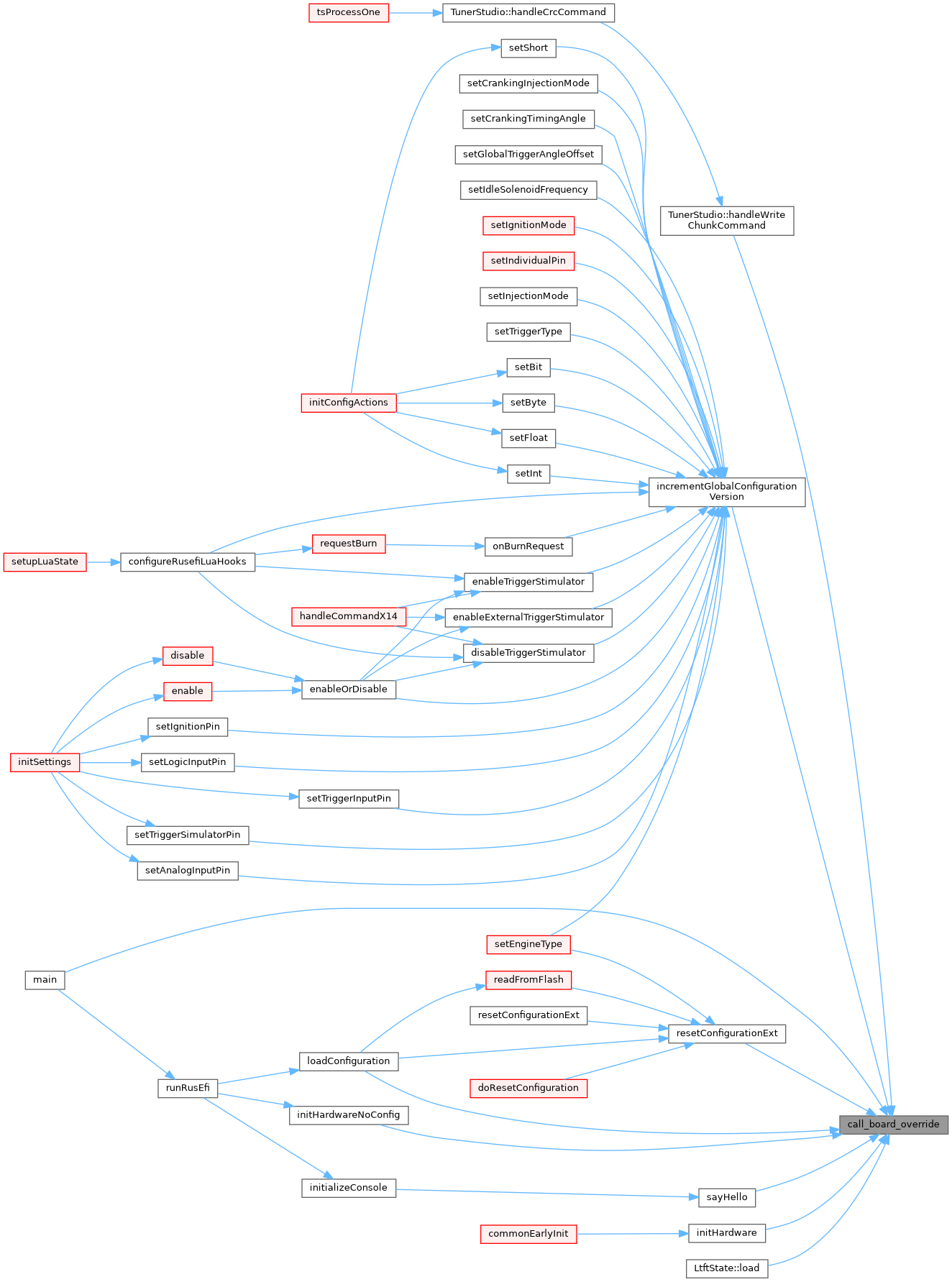
This function checks if an override is present and calls it if available. Return true if override is present and was called
Definition at line 88 of file board_overrides.h.
Referenced by applyEngineType(), TunerStudio::handleWriteChunkCommand(), incrementGlobalConfigurationVersion(), initHardware(), initHardwareNoConfig(), LtftState::load(), loadConfiguration(), main(), Engine::periodicFastCallback(), Engine::periodicSlowCallback(), resetConfigurationExt(), and sayHello().
Variable Documentation
◆ custom_board_AfterTuneDefaults
|
extern |
Definition at line 81 of file hardware.cpp.
Referenced by applyEngineType().
◆ custom_board_applyUnknownType
|
extern |
Definition at line 82 of file hardware.cpp.
Referenced by applyEngineType().
◆ custom_board_BeforeTuneDefaults
|
extern |
Definition at line 79 of file hardware.cpp.
Referenced by resetConfigurationExt().
◆ custom_board_boardSayHello
|
extern |
Definition at line 32 of file eficonsole.cpp.
Referenced by sayHello().
◆ custom_board_can_rx
|
extern |
Definition at line 225 of file can_rx.cpp.
Referenced by processCanRxMessage().
◆ custom_board_ConfigOverrides
|
extern |
Definition at line 71 of file engine_configuration.cpp.
Referenced by TunerStudio::handleWriteChunkCommand(), loadConfiguration(), resetConfigurationExt(), and setup_custom_board_overrides().
◆ custom_board_DefaultConfiguration
|
extern |
Definition at line 70 of file engine_configuration.cpp.
Referenced by resetConfigurationExt(), and setup_custom_board_overrides().
◆ custom_board_getMetaLowSideOutputs
|
extern |
◆ custom_board_getMetaOutputsCount
|
extern |
◆ custom_board_InitHardware
|
extern |
Definition at line 77 of file hardware.cpp.
Referenced by initHardware(), and setup_custom_board_overrides().
◆ custom_board_InitHardwareEarly
|
extern |
Definition at line 76 of file hardware.cpp.
Referenced by initHardwareNoConfig().
◆ custom_board_InitHardwareExtra
|
extern |
Definition at line 78 of file hardware.cpp.
Referenced by initHardware().
◆ custom_board_LtftTrimToVeApply
|
extern |
Definition at line 22 of file long_term_fuel_trim.cpp.
Referenced by LtftState::load().
◆ custom_board_OnConfigurationChange
|
extern |
Definition at line 72 of file engine_configuration.cpp.
Referenced by incrementGlobalConfigurationVersion(), initHardware(), and setup_custom_board_overrides().
◆ custom_board_periodicFastCallback
|
extern |
Definition at line 149 of file engine.cpp.
Referenced by Engine::periodicFastCallback().
◆ custom_board_periodicSlowCallback
|
extern |
Definition at line 148 of file engine.cpp.
Referenced by Engine::periodicSlowCallback(), and setup_custom_board_overrides().
◆ custom_board_preHalInit
|
extern |
Pre-HAL initialization override point Allows boards to perform custom initialization before HAL is initialized.
Definition at line 24 of file main.cpp.
Referenced by main(), and setup_custom_board_overrides().
◆ custom_board_ts_command
|
extern |
Definition at line 706 of file bench_test.cpp.
Referenced by executeTSCommand().
◆ custom_board_update_dash
|
extern |
Definition at line 618 of file can_dash.cpp.
Referenced by updateDash().