#include <can.h>
Inheritance diagram for CanWrite:
Collaboration diagram for CanWrite:
Public Member Functions | |
| CanWrite () | |
| void | PeriodicTask (efitick_t nowNt) override |
| Called periodically. Override this method to do work for your controller. | |
 Public Member Functions inherited from PeriodicController< 512 > Public Member Functions inherited from PeriodicController< 512 > | |
| PeriodicController (const char *name, tprio_t priority, float frequencyHz) | |
| PeriodicController (const char *name) | |
| void | setPeriod (int periodMs) |
| Public Member Functions inherited from ThreadController< TStackSize > | |
| ThreadController (const char *name, tprio_t priority) | |
| void | start () |
| Start the thread. | |
| void | stop () |
| Request thread termination and waits for termination. | |
Additional Inherited Members | |
| Protected Member Functions inherited from PeriodicController< 512 > | |
| virtual void | OnStarted () |
| Called before running the periodic task. Optionally override this method to set up. | |
| Protected Member Functions inherited from ThreadController< TStackSize > | |
| void | main () override |
| Protected Attributes inherited from ThreadController< TStackSize > | |
| const char *const | m_name |
Detailed Description
Constructor & Destructor Documentation
◆ CanWrite()
| CanWrite::CanWrite | ( | ) |
Definition at line 27 of file can_tx.cpp.
29{
30}
Base class for a controller that needs to run periodically to perform work.
Definition periodic_thread_controller.h:37
Member Function Documentation
◆ PeriodicTask()
|
overridevirtual |
Called periodically. Override this method to do work for your controller.
Implements PeriodicController< 512 >.
Definition at line 53 of file can_tx.cpp.
53 {
56
57 //in case we have Verbose Can enabled, we should keep user configured period
59 // slow down verbose CAN while in serial CAN
60 int canSleepPeriodMs = (engine->pauseCANdueToSerial ? 5 : 1) * engineConfiguration->canSleepPeriodMs;
61
63 if (cycle.isInterval(roundedInterval)) {
65 sendCanVerbose();
66 }
67 }
68
70
71 while (current) {
72 current = current->request();
73 }
74
76 //we now reset cycleCount since we reached max cycle count
77 m_cycleCount = 0;
78 }
79
80 updateDash(cycle);
81
84 sendQcBenchEventCounters();
86#ifdef HW_HELLEN_8CHAN
89#endif
90 }
91
93 sendQcBenchBoardStatus();
94#ifdef HW_HELLEN_8CHAN
96#endif
99 }
100 }
101
102 if (engineConfiguration->enableAemXSeries && cycle.isInterval(CI::_50ms) && boardEnableSendWidebandInfo()) {
103 sendWidebandInfo();
104 }
105
106 m_cycleCount++;
107}
@ _50ms
@ _MAX_Cycle
@ _250ms
@ _100ms
void sendQcBenchRawAnalogValues(size_t bus)
Definition can_bench_test.cpp:162
Definition can_listener.h:12
Definition perf_trace.h:109
static constexpr engine_configuration_s * engineConfiguration
Definition engine_configuration.h:80
@ CanThreadTx
int canSleepPeriodMs
bool enableVerboseCanTx
bool enableExtendedCanBroadcast
bool enableAemXSeries
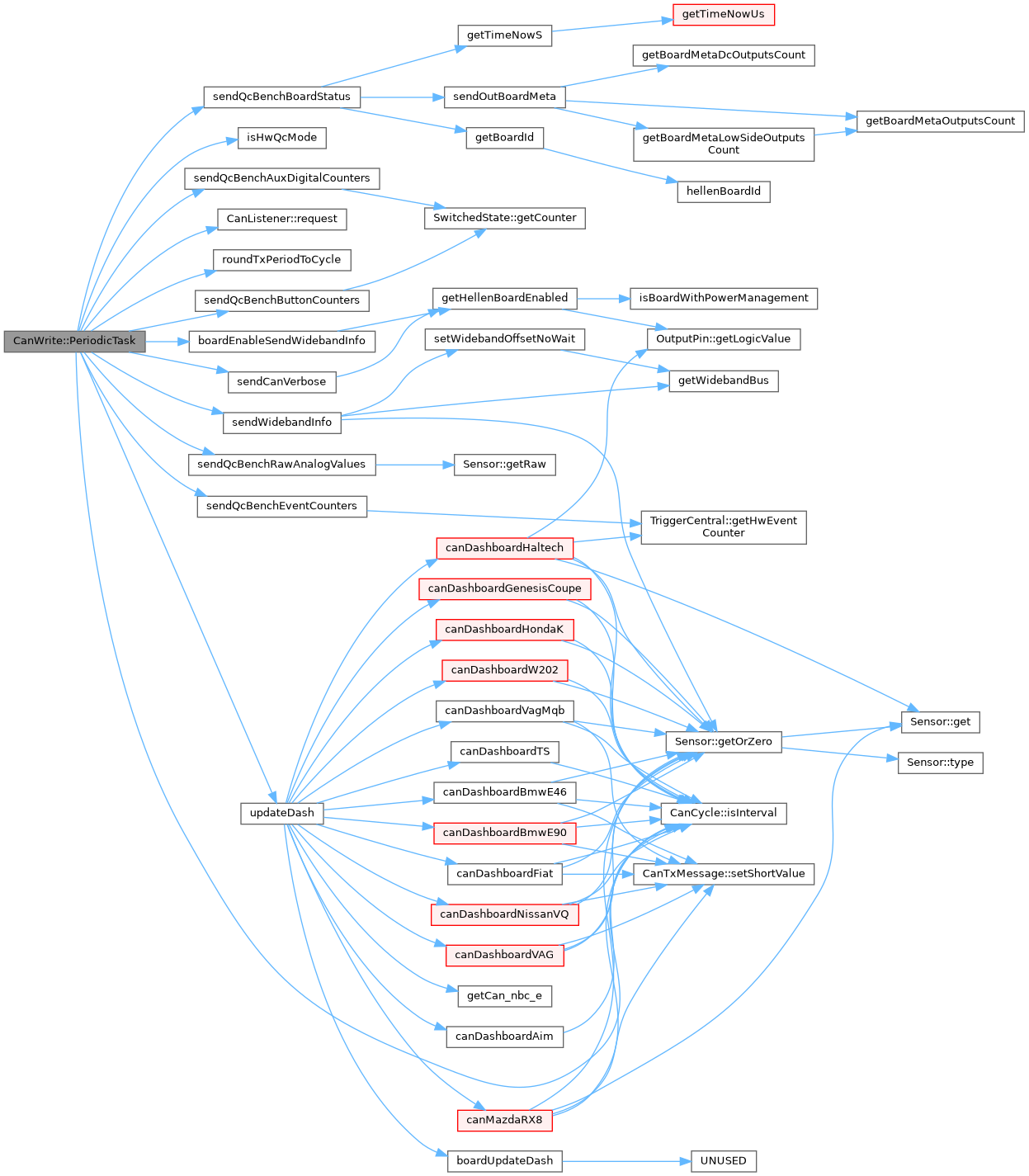
Here is the call graph for this function:
The documentation for this class was generated from the following files:
- controllers/can/can.h
- controllers/can/can_tx.cpp