Variables | |
| static OutputPin | megaEn |
| static bool | hellenEnPinInitialized = false |
| Timer | hellenEnPinStateChange |
| OutputPin | accelerometerChipSelect |
Function Documentation
◆ boardEnableSendWidebandInfo()
| bool boardEnableSendWidebandInfo | ( | ) |
Definition at line 67 of file hellen_common.cpp.
Referenced by CanWrite::PeriodicTask().


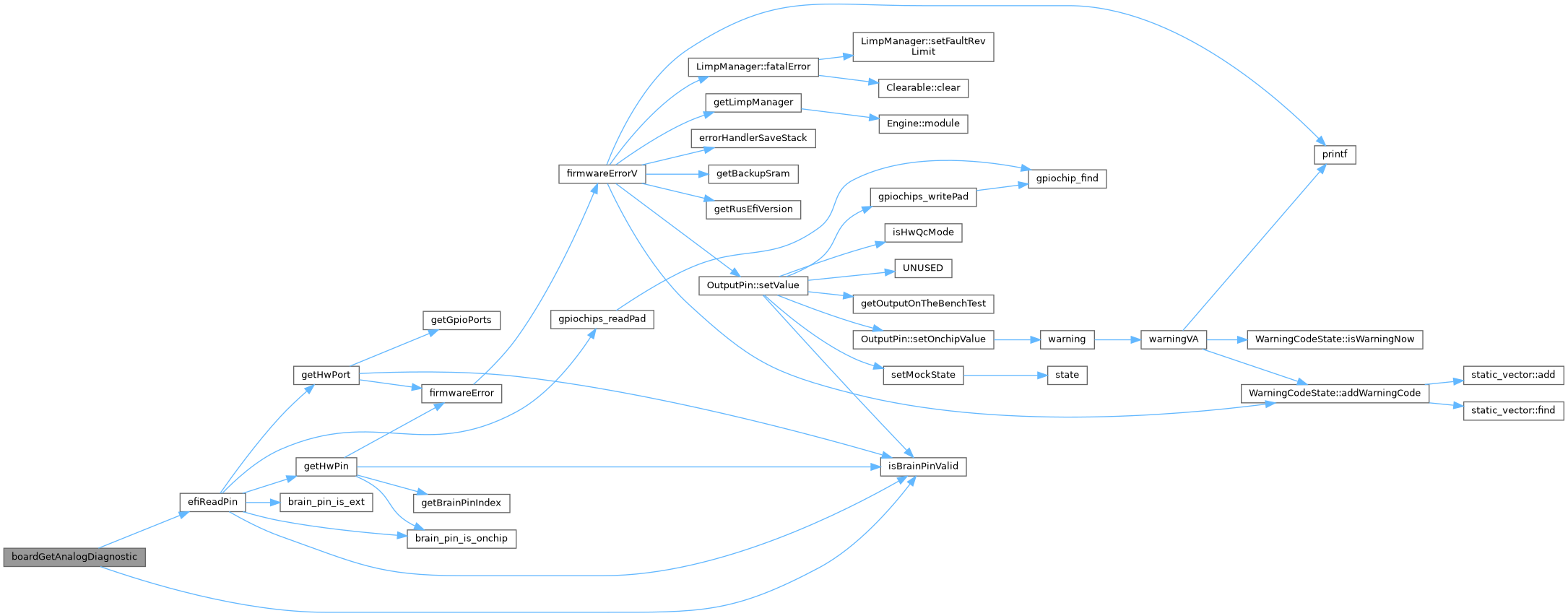
◆ boardGetAnalogDiagnostic()
| ObdCode boardGetAnalogDiagnostic | ( | ) |
Definition at line 228 of file hellen_common.cpp.
Referenced by boardGetAnalogInputDiagnostic().

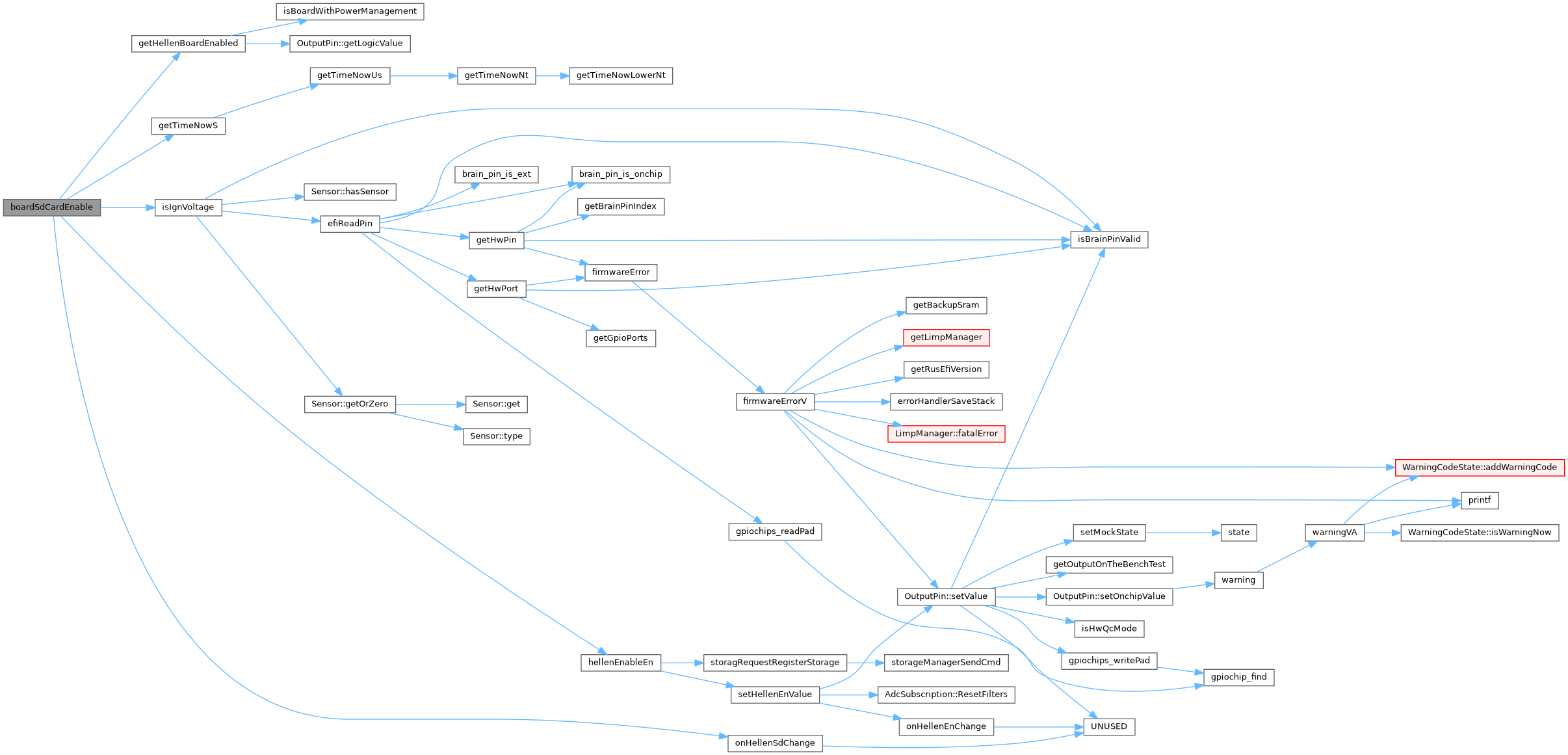
◆ boardSdCardEnable()
| bool boardSdCardEnable | ( | ) |
Definition at line 267 of file hellen_common.cpp.
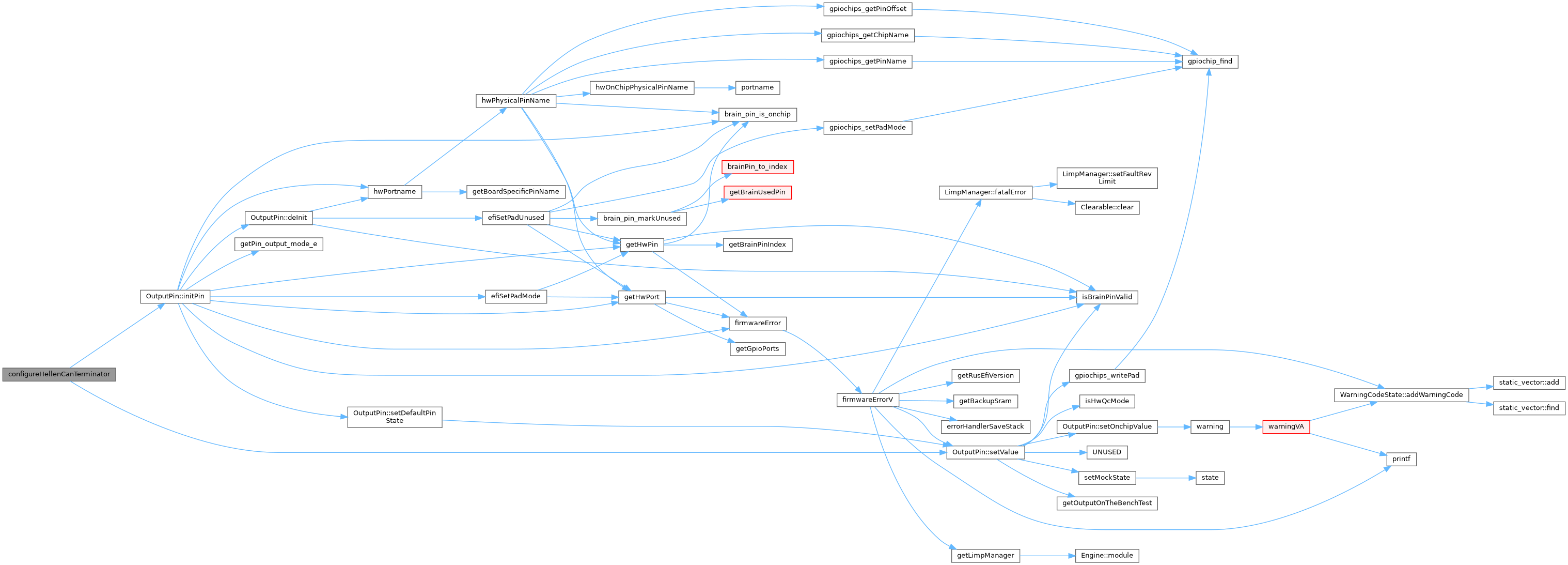
◆ configureHellenCanTerminator()
| void configureHellenCanTerminator | ( | ) |
Definition at line 212 of file hellen_common.cpp.
Referenced by hellen112_17_boardConfigOverrides(), and hellen_honda_k_boardConfigOverrides().

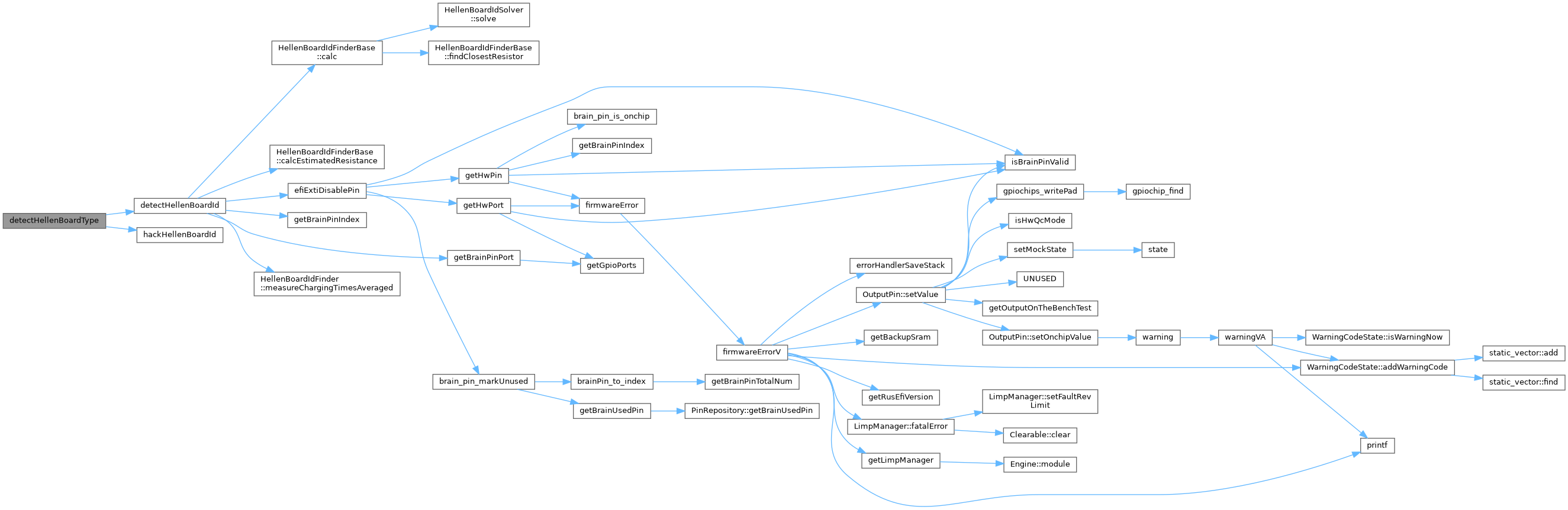
◆ detectHellenBoardType()
| void detectHellenBoardType | ( | ) |
Definition at line 222 of file hellen_common.cpp.
Referenced by detectBoardType().

◆ fansDisabledByBoardStatus()
| bool fansDisabledByBoardStatus | ( | ) |
Definition at line 74 of file hellen_common.cpp.
Referenced by FanController::getState().


◆ getAnalogInputDividerCoefficient()
| float getAnalogInputDividerCoefficient | ( | adc_channel_e | hwChannel | ) |
Definition at line 243 of file hellen_common.cpp.
◆ getHellenBoardEnabled()
| bool getHellenBoardEnabled | ( | ) |
Definition at line 63 of file hellen_common.cpp.
Referenced by boardEnableSendWidebandInfo(), boardSdCardEnable(), fansDisabledByBoardStatus(), sendCanVerbose(), and setHwQcMode().


◆ hellenBoardStandBy()
| void hellenBoardStandBy | ( | ) |
Definition at line 172 of file hellen_common.cpp.
Referenced by onBoardStandBy().


◆ hellenDisableEn()
| void hellenDisableEn | ( | const char * | msg | ) |
Definition at line 118 of file hellen_common.cpp.
Referenced by configureRusefiLuaHooks(), and hellenBoardStandBy().


◆ hellenDisableEnSilently()
| void hellenDisableEnSilently | ( | ) |
Definition at line 147 of file hellen_common.cpp.
Referenced by hellenDisableEn(), and turnAllPinsOff().

◆ hellenEnableEn()
| void hellenEnableEn | ( | const char * | msg | ) |
Definition at line 109 of file hellen_common.cpp.
Referenced by boardSdCardEnable(), configureRusefiLuaHooks(), setHellenEnPin(), and setHwQcMode().
◆ hellenMegaAccelerometerPreInitCS2Pin()
| void hellenMegaAccelerometerPreInitCS2Pin | ( | ) |
Definition at line 201 of file hellen_common.cpp.
Referenced by hellenMegaSdWithAccelerometer(), and setMegaUaefiBoardConfigOverrides().
◆ hellenMegaModule()
| void hellenMegaModule | ( | ) |
Definition at line 195 of file hellen_common.cpp.
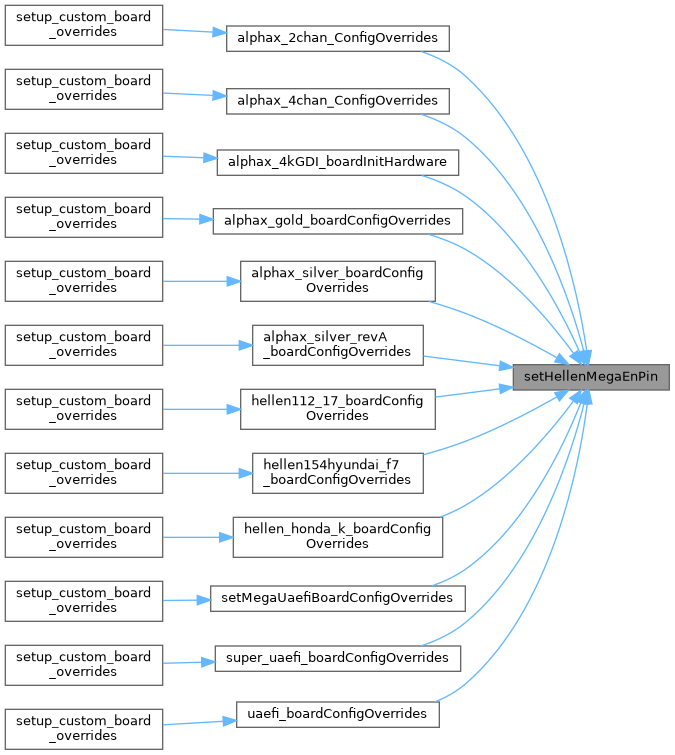
Referenced by alphax_8chan_boardConfigOverrides(), alphax_silver_boardConfigOverrides(), alphax_silver_revA_boardConfigOverrides(), hellen154hyundai_f7_boardConfigOverrides(), and hellen_honda_k_boardConfigOverrides().
◆ hellenMegaSdWithAccelerometer()
| void hellenMegaSdWithAccelerometer | ( | ) |
Definition at line 189 of file hellen_common.cpp.
Referenced by alphax_2chan_ConfigOverrides(), alphax_4chan_ConfigOverrides(), alphax_4kgdi_boardConfigOverrides(), alphax_gold_boardConfigOverrides(), hellen112_17_boardConfigOverrides(), hellenMegaModule(), super_uaefi_boardConfigOverrides(), and uaefi_boardConfigOverrides().
◆ hellenWbo()
| void hellenWbo | ( | ) |
Definition at line 7 of file hellen_common.cpp.
Referenced by alphax_4kgdi_defaultConfiguration(), alphax_8chan_defaultConfiguration(), alphax_8chan_reva_boardDefaultConfiguration(), hellen121_nissan_boardDefaultConfiguration(), hellen128_boardDefaultConfiguration(), hellen88_boardDefaultConfiguration(), hellen_honda_k_boardDefaultConfiguration(), hellen_MiataNB2_boardDefaultConfiguration(), super_uaefi_boardDefaultConfiguration(), and uaefi_boardDefaultConfiguration().
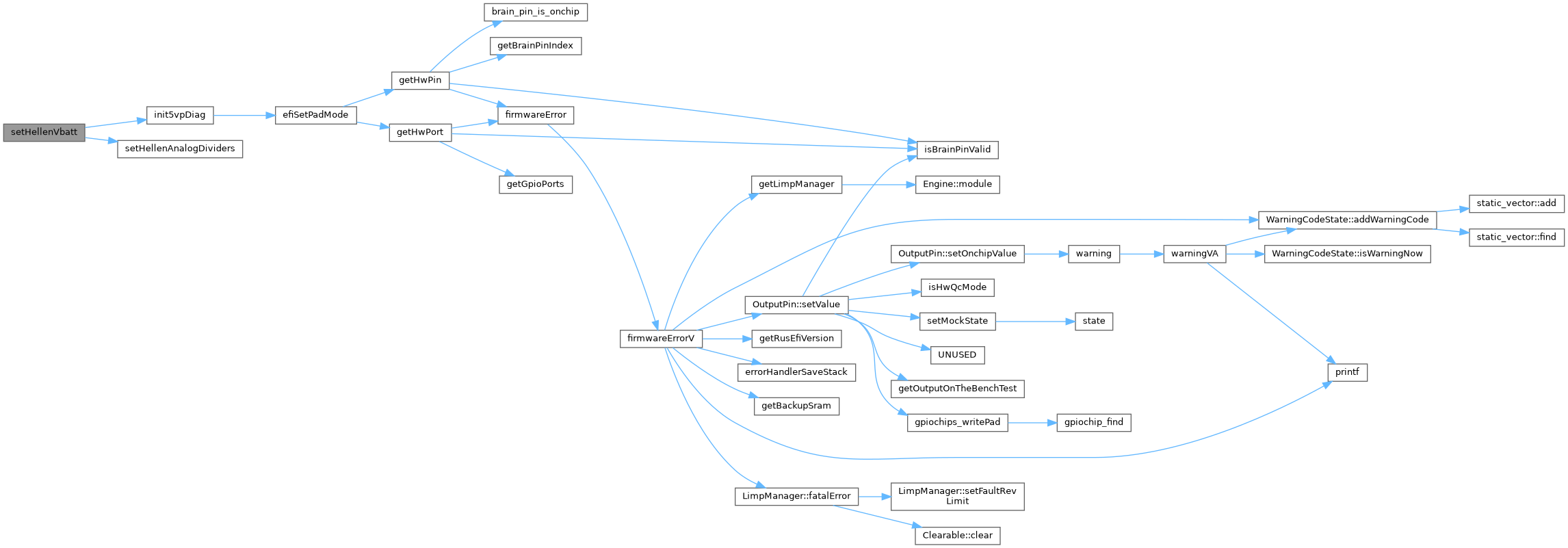
◆ init5vpDiag()
|
static |
Definition at line 23 of file hellen_common.cpp.
Referenced by setHellenVbatt().
◆ isBoardWithPowerManagement()
| PUBLIC_API_WEAK bool isBoardWithPowerManagement | ( | ) |
Definition at line 59 of file hellen_common.cpp.
Referenced by FuelLevelFunc::convert(), and getHellenBoardEnabled().

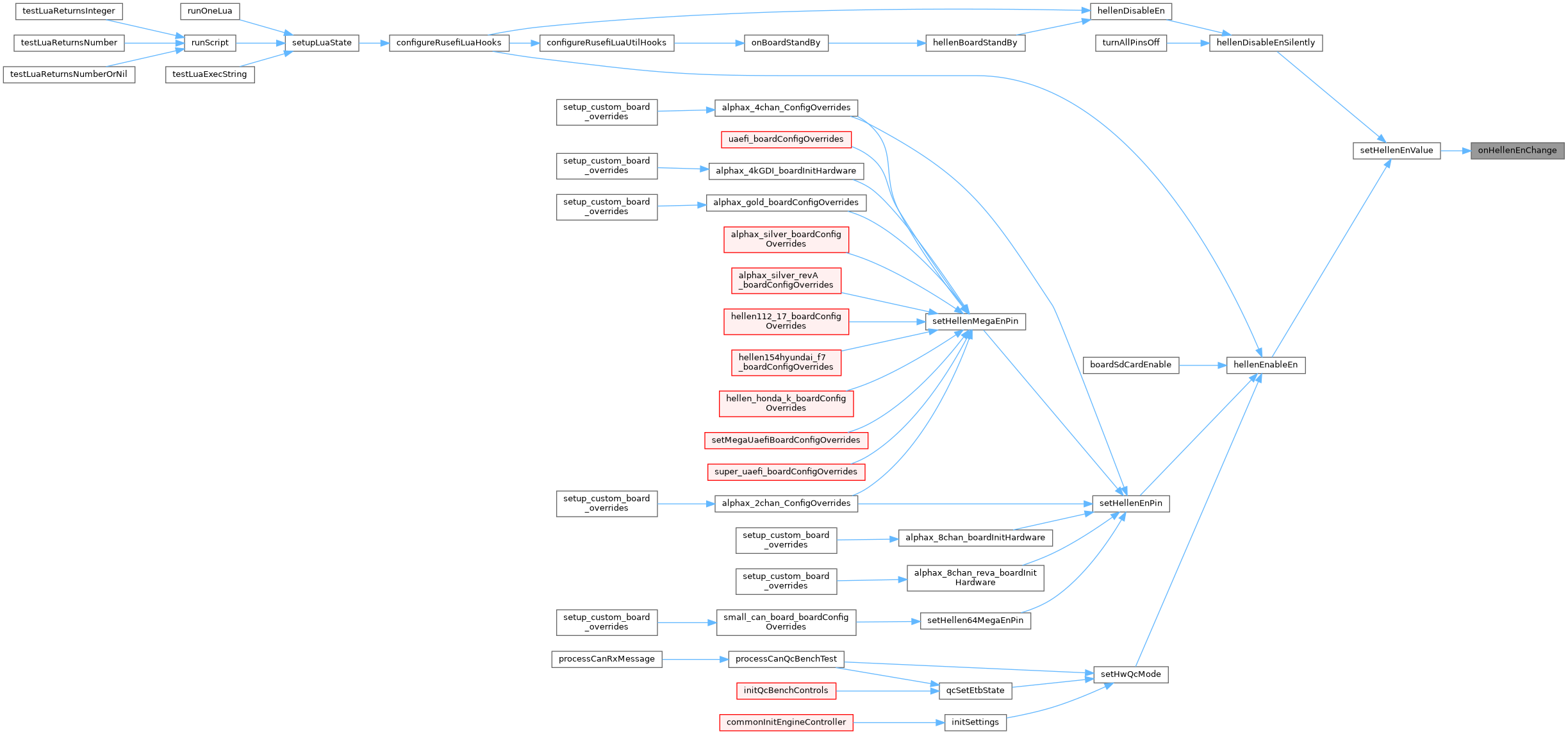
◆ onHellenEnChange()
| PUBLIC_API_WEAK void onHellenEnChange | ( | int | value | ) |
Definition at line 78 of file hellen_common.cpp.
Referenced by setHellenEnValue().

◆ onHellenSdChange()
| PUBLIC_API_WEAK bool onHellenSdChange | ( | int | value | ) |
Definition at line 81 of file hellen_common.cpp.
Referenced by boardSdCardEnable().


◆ setHellen64Can()
| void setHellen64Can | ( | ) |
Definition at line 51 of file hellen_common.cpp.
Referenced by small_can_board_boardConfigOverrides().

◆ setHellen64MegaEnPin()
| void setHellen64MegaEnPin | ( | ) |
Definition at line 168 of file hellen_common.cpp.
Referenced by small_can_board_boardConfigOverrides().

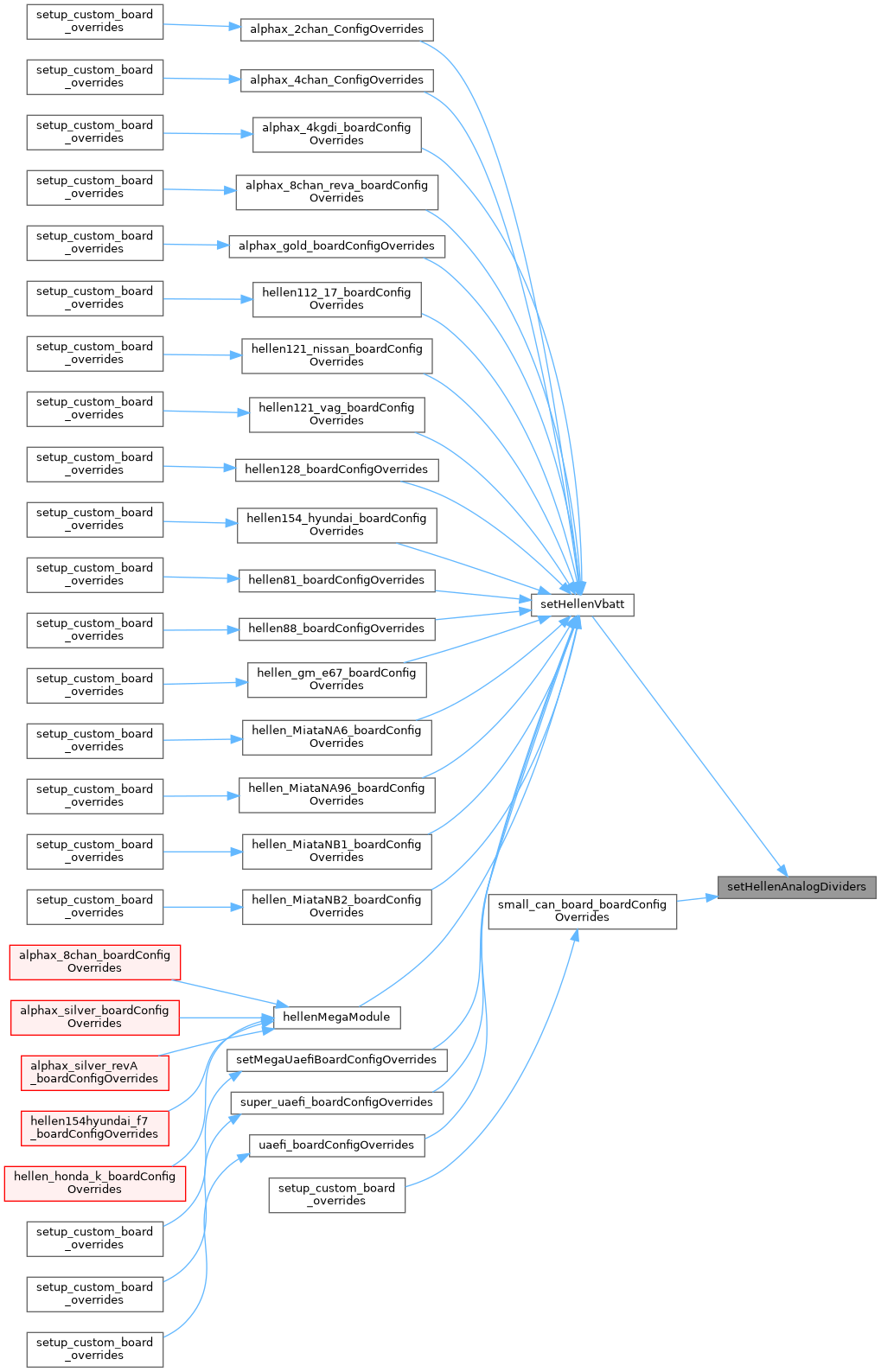
◆ setHellenAnalogDividers()
| void setHellenAnalogDividers | ( | ) |
Definition at line 33 of file hellen_common.cpp.
Referenced by setHellenVbatt(), and small_can_board_boardConfigOverrides().
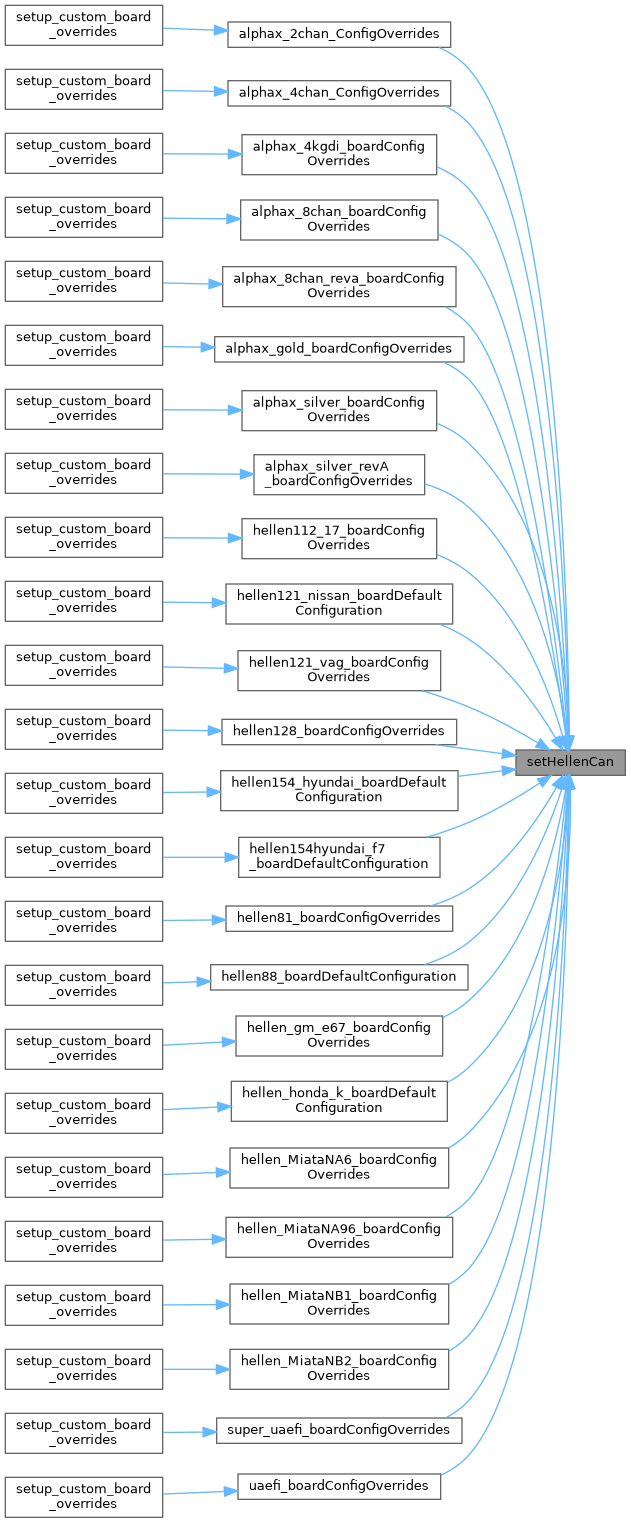
◆ setHellenCan()
| void setHellenCan | ( | ) |
Definition at line 12 of file hellen_common.cpp.
Referenced by alphax_2chan_ConfigOverrides(), alphax_4chan_ConfigOverrides(), alphax_4kgdi_boardConfigOverrides(), alphax_8chan_boardConfigOverrides(), alphax_8chan_reva_boardConfigOverrides(), alphax_gold_boardConfigOverrides(), alphax_silver_boardConfigOverrides(), alphax_silver_revA_boardConfigOverrides(), hellen112_17_boardConfigOverrides(), hellen121_nissan_boardDefaultConfiguration(), hellen121_vag_boardConfigOverrides(), hellen128_boardConfigOverrides(), hellen154_hyundai_boardDefaultConfiguration(), hellen154hyundai_f7_boardDefaultConfiguration(), hellen81_boardConfigOverrides(), hellen88_boardDefaultConfiguration(), hellen_gm_e67_boardConfigOverrides(), hellen_honda_k_boardDefaultConfiguration(), hellen_MiataNA6_boardConfigOverrides(), hellen_MiataNA96_boardConfigOverrides(), hellen_MiataNB1_boardConfigOverrides(), hellen_MiataNB2_boardConfigOverrides(), super_uaefi_boardConfigOverrides(), and uaefi_boardConfigOverrides().
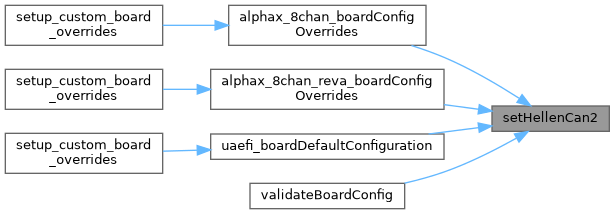
◆ setHellenCan2()
| void setHellenCan2 | ( | ) |
Definition at line 18 of file hellen_common.cpp.
Referenced by alphax_8chan_boardConfigOverrides(), alphax_8chan_reva_boardConfigOverrides(), uaefi_boardDefaultConfiguration(), and validateBoardConfig().
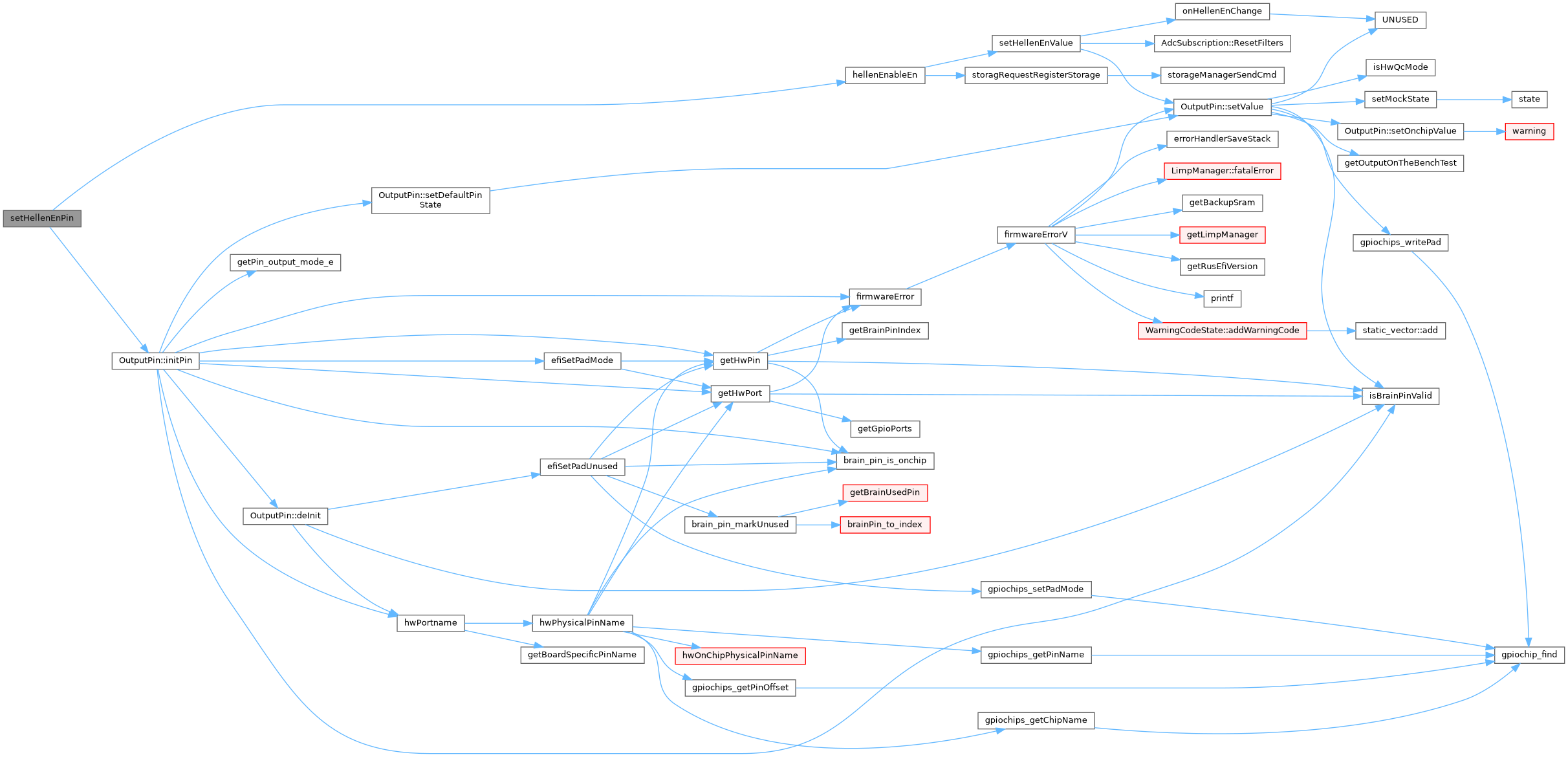
◆ setHellenEnPin()
Definition at line 153 of file hellen_common.cpp.
Referenced by alphax_2chan_ConfigOverrides(), alphax_4chan_ConfigOverrides(), alphax_8chan_boardInitHardware(), alphax_8chan_reva_boardInitHardware(), setHellen64MegaEnPin(), and setHellenMegaEnPin().
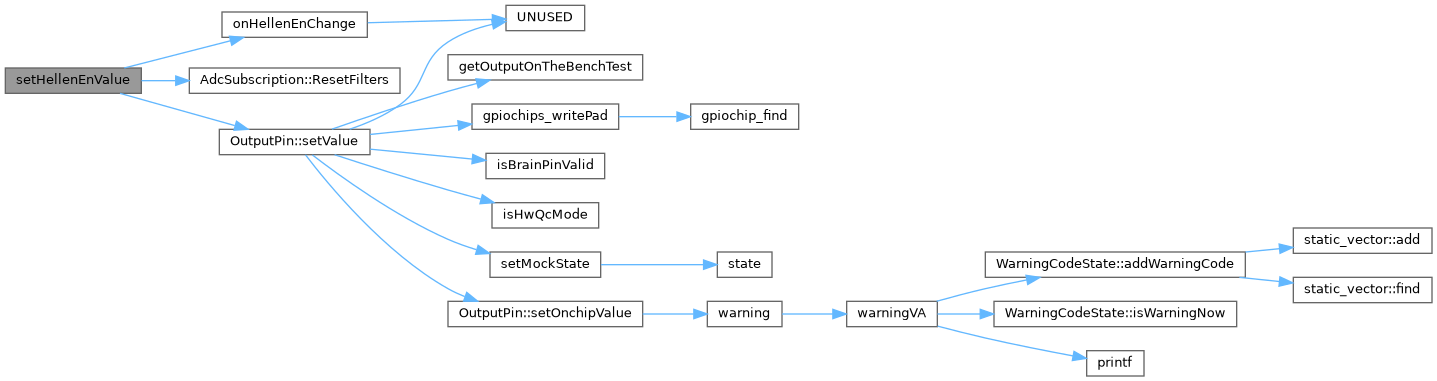
◆ setHellenEnValue()
|
static |
Definition at line 93 of file hellen_common.cpp.
Referenced by hellenDisableEnSilently(), and hellenEnableEn().
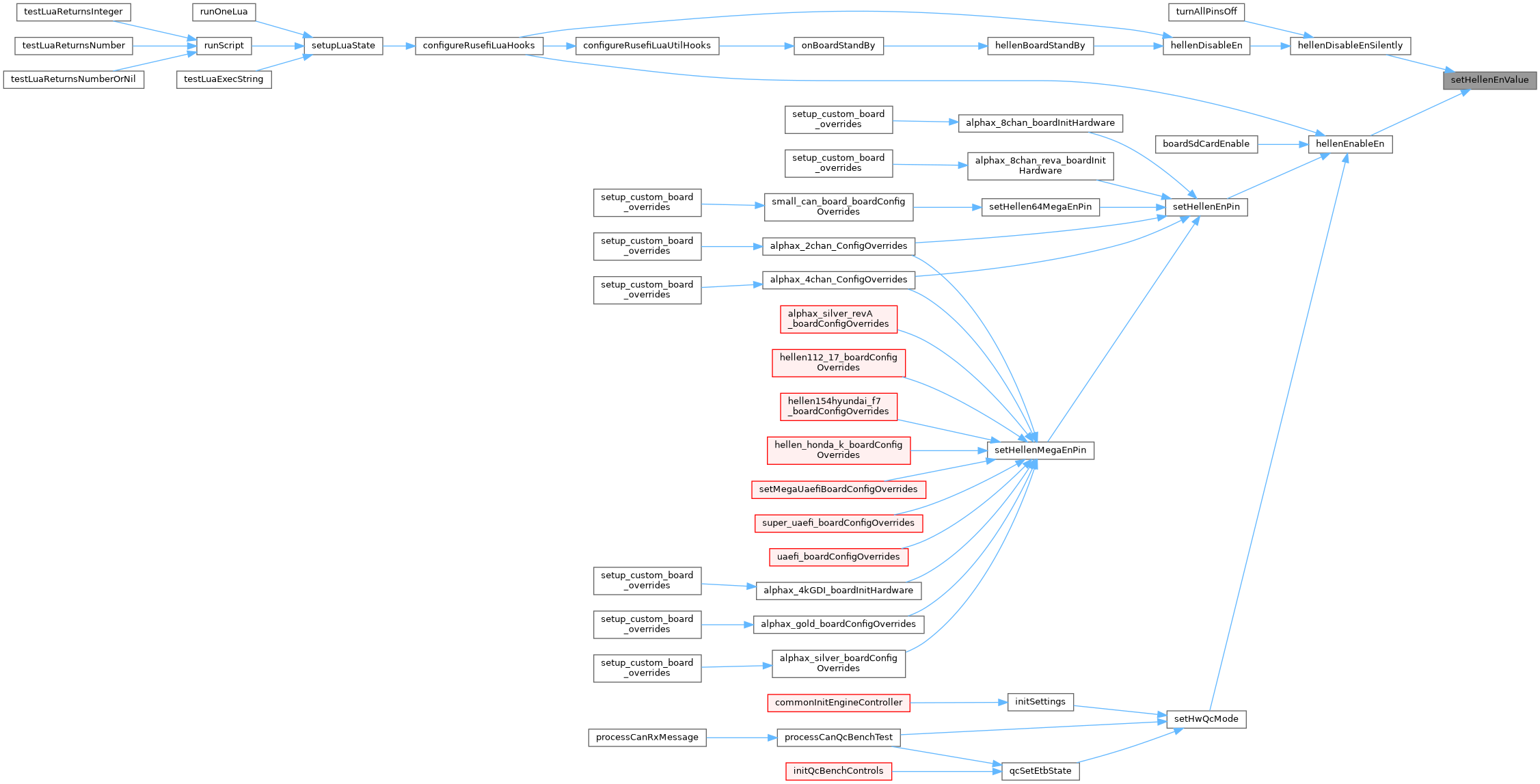
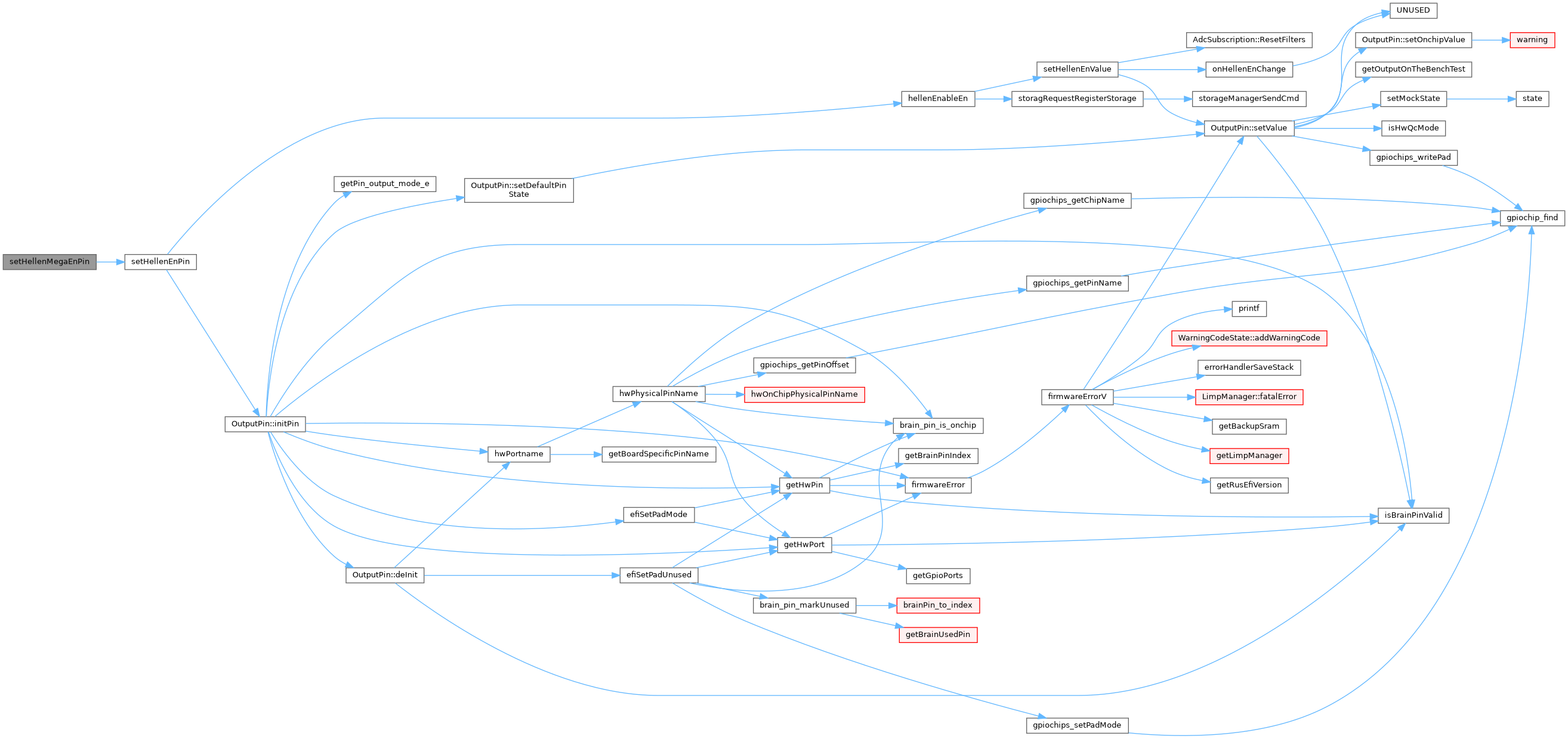
◆ setHellenMegaEnPin()
| void setHellenMegaEnPin | ( | bool | enableBoardOnStartUp | ) |
Definition at line 163 of file hellen_common.cpp.
Referenced by alphax_2chan_ConfigOverrides(), alphax_4chan_ConfigOverrides(), alphax_4kGDI_boardInitHardware(), alphax_gold_boardConfigOverrides(), alphax_silver_boardConfigOverrides(), alphax_silver_revA_boardConfigOverrides(), hellen112_17_boardConfigOverrides(), hellen154hyundai_f7_boardConfigOverrides(), hellen_honda_k_boardConfigOverrides(), setMegaUaefiBoardConfigOverrides(), super_uaefi_boardConfigOverrides(), and uaefi_boardConfigOverrides().
◆ setHellenVbatt()
| void setHellenVbatt | ( | ) |
Definition at line 43 of file hellen_common.cpp.
Referenced by alphax_2chan_ConfigOverrides(), alphax_4chan_ConfigOverrides(), alphax_4kgdi_boardConfigOverrides(), alphax_8chan_reva_boardConfigOverrides(), alphax_gold_boardConfigOverrides(), hellen112_17_boardConfigOverrides(), hellen121_nissan_boardConfigOverrides(), hellen121_vag_boardConfigOverrides(), hellen128_boardConfigOverrides(), hellen154_hyundai_boardConfigOverrides(), hellen81_boardConfigOverrides(), hellen88_boardConfigOverrides(), hellen_gm_e67_boardConfigOverrides(), hellen_MiataNA6_boardConfigOverrides(), hellen_MiataNA96_boardConfigOverrides(), hellen_MiataNB1_boardConfigOverrides(), hellen_MiataNB2_boardConfigOverrides(), hellenMegaModule(), setMegaUaefiBoardConfigOverrides(), super_uaefi_boardConfigOverrides(), and uaefi_boardConfigOverrides().
Variable Documentation
◆ accelerometerChipSelect
|
extern |
We need to make sure that accelerometer device which physically exists does not conflict with SD card in case of shared SPI. We reply on specific order of execution here: 1) accelerometer pre-initialization into safe CS pin state 2) SD card initialization 3) accelerometer main initialization if accelerometer feature is desired
Definition at line 70 of file accelerometer.cpp.
Referenced by hellenMegaAccelerometerPreInitCS2Pin(), and initAccelerometer().
◆ hellenEnPinInitialized
|
static |
Definition at line 72 of file hellen_common.cpp.
Referenced by setHellenEnPin().
◆ hellenEnPinStateChange
| Timer hellenEnPinStateChange |
Definition at line 90 of file hellen_common.cpp.
Referenced by FuelLevelFunc::convert(), and setHellenEnValue().
◆ megaEn
|
static |
Definition at line 56 of file hellen_common.cpp.
Referenced by getHellenBoardEnabled(), setHellenEnPin(), and setHellenEnValue().