Detailed Description
This file handles transmission of ECU data to various OE dashboards.
- Date
- Mar 19, 2020
Definition in file can_dash.cpp.
Functions | |
| void | canDashboardFiat (CanCycle cycle) |
| void | canMazdaRX8 (CanCycle cycle) |
| void | canDashboardW202 (CanCycle cycle) |
| void | canDashboardVagMqb (CanCycle cycle) |
| void | canDashboardGenesisCoupe (CanCycle cycle) |
| void | canDashboardAim (CanCycle cycle) |
| static void | canDashboardBmwE46 (CanCycle cycle) |
| void | canDashboardVAG (CanCycle cycle) |
| static void | canDashboardBmwE90 (CanCycle cycle) |
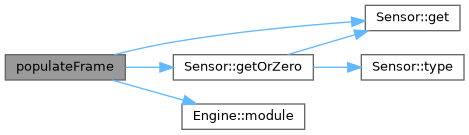
| void | populateFrame (Aim5f0 &msg) |
| void | populateFrame (Aim5f1 &msg) |
| void | populateFrame (Aim5f2 &msg) |
| void | populateFrame (Aim5f3 &msg) |
| void | populateFrame (Aim5f4 &msg) |
| void | populateFrame (Aim5f5 &msg) |
| void | populateFrame (Aim5f6 &msg) |
| void | populateFrame (Aim5f7 &msg) |
| PUBLIC_API_WEAK void | boardUpdateDash (CanCycle cycle) |
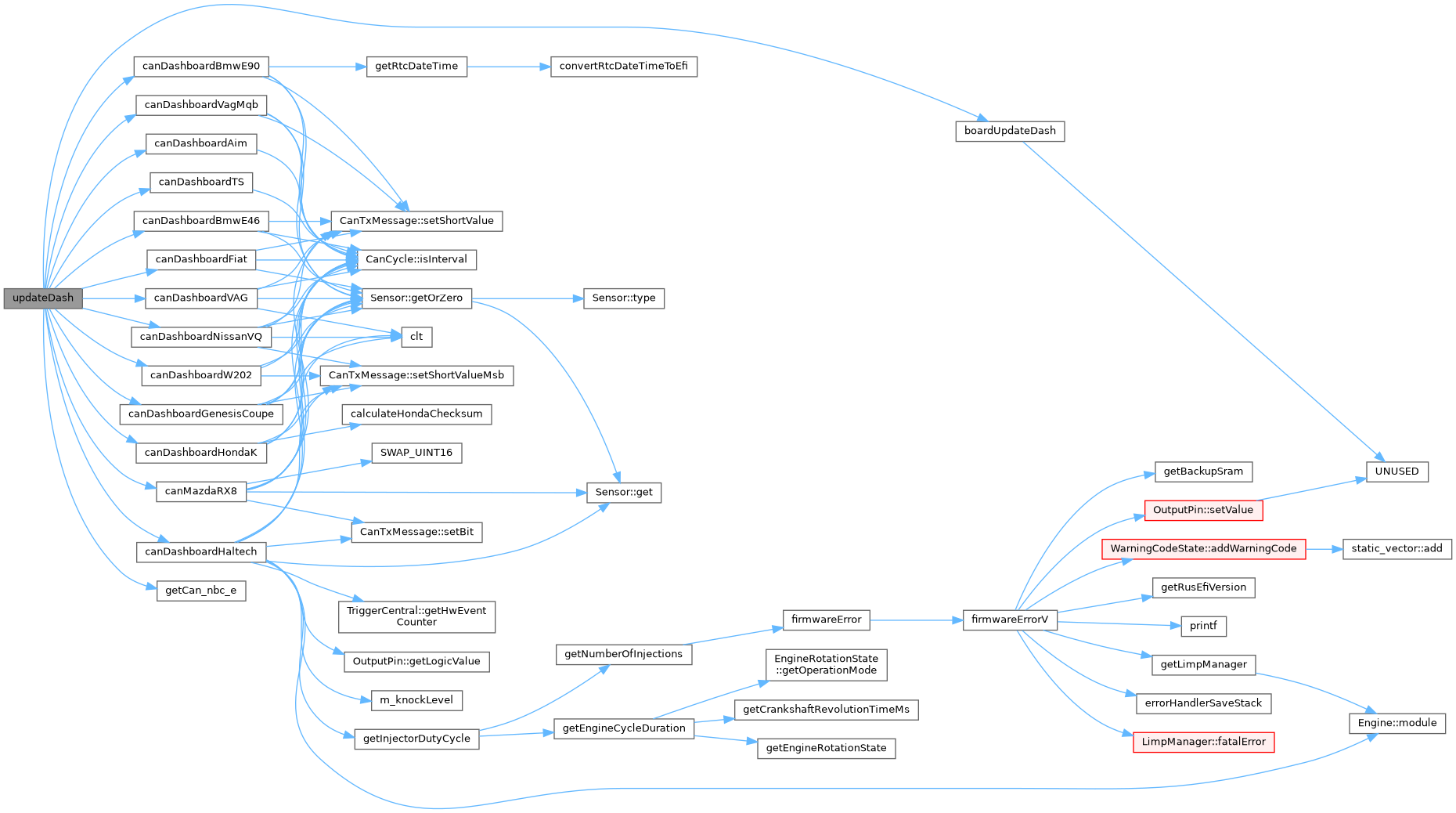
| void | updateDash (CanCycle cycle) |
Variables | |
| static time_msecs_t | mph_timer |
| static time_msecs_t | mph_ctr |
| static uint8_t | rpmcounter |
| static uint8_t | seatbeltcnt |
| static uint8_t | abscounter = 0xF0 |
| static uint8_t | brakecnt_1 = 0xF0 |
| static uint8_t | brakecnt_2 = 0xF0 |
| static uint8_t | mph_a |
| static uint8_t | mph_2a |
| static uint8_t | mph_last |
| static uint8_t | tmp_cnt |
| static uint8_t | gear_cnt |
| static uint16_t | mph_counter = 0xF000 |
| static bool | cluster_time_set |
| constexpr uint8_t | e90_temp_offset = 49 |
| std::optional< board_can_update_dash_type > | custom_board_update_dash |
Function Documentation
◆ boardUpdateDash()
| PUBLIC_API_WEAK void boardUpdateDash | ( | CanCycle | cycle | ) |
Definition at line 620 of file can_dash.cpp.
Referenced by updateDash().


◆ canDashboardAim()
| void canDashboardAim | ( | CanCycle | cycle | ) |
Definition at line 593 of file can_dash.cpp.
Referenced by updateDash().


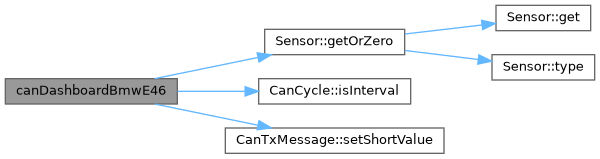
◆ canDashboardBmwE46()
|
static |
Definition at line 89 of file can_dash.cpp.
Referenced by updateDash().

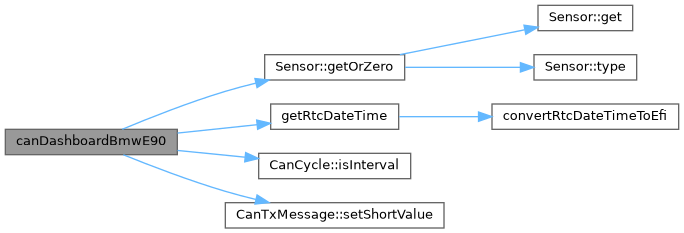
◆ canDashboardBmwE90()
|
static |
Definition at line 303 of file can_dash.cpp.
Referenced by updateDash().

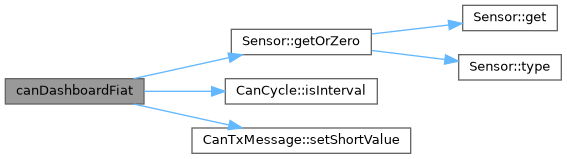
◆ canDashboardFiat()
| void canDashboardFiat | ( | CanCycle | cycle | ) |
Definition at line 176 of file can_dash.cpp.
Referenced by updateDash().

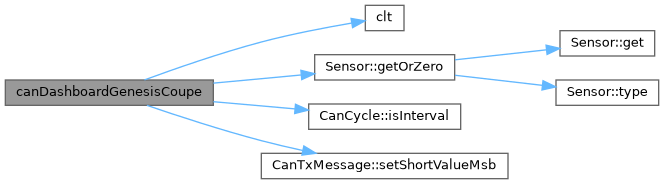
◆ canDashboardGenesisCoupe()
| void canDashboardGenesisCoupe | ( | CanCycle | cycle | ) |
Definition at line 270 of file can_dash.cpp.
Referenced by updateDash().

◆ canDashboardVAG()
| void canDashboardVAG | ( | CanCycle | cycle | ) |
Definition at line 187 of file can_dash.cpp.
Referenced by updateDash().

◆ canDashboardVagMqb()
| void canDashboardVagMqb | ( | CanCycle | cycle | ) |
https://docs.google.com/spreadsheets/d/1XMfeGlhgl0lBL54lNtPdmmFd8gLr2T_YTriokb30kJg
Definition at line 287 of file can_dash.cpp.
Referenced by updateDash().

◆ canDashboardW202()
| void canDashboardW202 | ( | CanCycle | cycle | ) |
Definition at line 215 of file can_dash.cpp.
Referenced by updateDash().

◆ canMazdaRX8()
| void canMazdaRX8 | ( | CanCycle | cycle | ) |
Definition at line 118 of file can_dash.cpp.
Referenced by updateDash().

◆ populateFrame() [1/8]
| void populateFrame | ( | Aim5f0 & | msg | ) |
Definition at line 465 of file can_dash.cpp.
Referenced by transmitStruct().


◆ populateFrame() [2/8]
| void populateFrame | ( | Aim5f1 & | msg | ) |
Definition at line 479 of file can_dash.cpp.
◆ populateFrame() [3/8]
| void populateFrame | ( | Aim5f2 & | msg | ) |
Definition at line 494 of file can_dash.cpp.

◆ populateFrame() [4/8]
| void populateFrame | ( | Aim5f3 & | msg | ) |
Definition at line 508 of file can_dash.cpp.

◆ populateFrame() [5/8]
| void populateFrame | ( | Aim5f4 & | msg | ) |
Definition at line 525 of file can_dash.cpp.
◆ populateFrame() [6/8]
| void populateFrame | ( | Aim5f5 & | msg | ) |
Definition at line 552 of file can_dash.cpp.

◆ populateFrame() [7/8]
| void populateFrame | ( | Aim5f6 & | msg | ) |
Definition at line 568 of file can_dash.cpp.

◆ populateFrame() [8/8]
| void populateFrame | ( | Aim5f7 & | msg | ) |
Definition at line 582 of file can_dash.cpp.
◆ updateDash()
| void updateDash | ( | CanCycle | cycle | ) |
Definition at line 622 of file can_dash.cpp.
Referenced by CanWrite::PeriodicTask().

Variable Documentation
◆ abscounter
|
static |
Definition at line 71 of file can_dash.cpp.
Referenced by canDashboardBmwE90().
◆ brakecnt_1
|
static |
Definition at line 72 of file can_dash.cpp.
Referenced by canDashboardBmwE90().
◆ brakecnt_2
|
static |
Definition at line 72 of file can_dash.cpp.
Referenced by canDashboardBmwE90().
◆ cluster_time_set
|
static |
Definition at line 75 of file can_dash.cpp.
Referenced by canDashboardBmwE90().
◆ custom_board_update_dash
| std::optional<board_can_update_dash_type> custom_board_update_dash |
Definition at line 618 of file can_dash.cpp.
Referenced by updateDash().
◆ e90_temp_offset
|
constexpr |
Definition at line 77 of file can_dash.cpp.
Referenced by canDashboardBmwE90().
◆ gear_cnt
|
static |
Definition at line 73 of file can_dash.cpp.
Referenced by canDashboardBmwE90().
◆ mph_2a
|
static |
Definition at line 73 of file can_dash.cpp.
Referenced by canDashboardBmwE90().
◆ mph_a
|
static |
Definition at line 73 of file can_dash.cpp.
Referenced by canDashboardBmwE90().
◆ mph_counter
|
static |
Definition at line 74 of file can_dash.cpp.
Referenced by canDashboardBmwE90().
◆ mph_ctr
|
static |
Definition at line 56 of file can_dash.cpp.
Referenced by canDashboardBmwE90().
◆ mph_last
|
static |
Definition at line 73 of file can_dash.cpp.
Referenced by canDashboardBmwE90().
◆ mph_timer
|
static |
Definition at line 55 of file can_dash.cpp.
Referenced by canDashboardBmwE90().
◆ rpmcounter
|
static |
Definition at line 69 of file can_dash.cpp.
Referenced by canDashboardBmwE90().
◆ seatbeltcnt
|
static |
Definition at line 70 of file can_dash.cpp.
Referenced by canDashboardBmwE90().
◆ tmp_cnt
|
static |
Definition at line 73 of file can_dash.cpp.
Referenced by canDashboardBmwE90().