Base class for a controller that needs to run periodically to perform work. More...
#include <periodic_thread_controller.h>
Public Member Functions | |
| PeriodicController (const char *name, tprio_t priority, float frequencyHz) | |
| PeriodicController (const char *name) | |
| void | setPeriod (int periodMs) |
 Public Member Functions inherited from ThreadController< TStackSize > Public Member Functions inherited from ThreadController< TStackSize > | |
| ThreadController (const char *name, tprio_t priority) | |
| void | start () |
| Start the thread. | |
| void | stop () |
| Request thread termination and waits for termination. | |
Protected Member Functions | |
| virtual void | OnStarted () |
| Called before running the periodic task. Optionally override this method to set up. | |
| virtual void | PeriodicTask (efitick_t nowNt)=0 |
| Called periodically. Override this method to do work for your controller. | |
| Protected Member Functions inherited from ThreadController< TStackSize > | |
| void | main () override |
Private Member Functions | |
| void | ThreadTask () override final |
Private Attributes | |
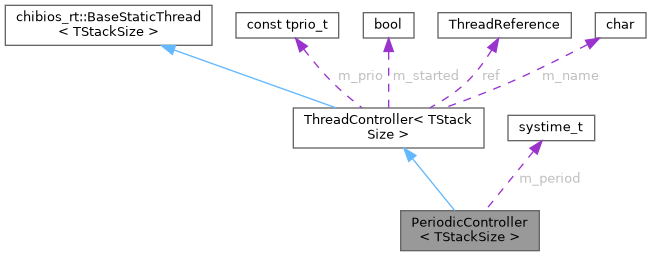
| systime_t | m_period |
Additional Inherited Members | |
| Protected Attributes inherited from ThreadController< TStackSize > | |
| const char *const | m_name |
Detailed Description
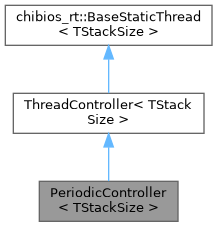
class PeriodicController< TStackSize >
Base class for a controller that needs to run periodically to perform work.
For example, if we have some PID loop that needs to run at a specified frequency, inherit this class, and perform your period update in PeriodicTask. Any one-time setup work can be performed in OnStarted().
Each instance has one underlying thread meaning that task could be blocking/synchronous. This class effectively implements this functionality:
void thread() { OnStarted();
while(true) { PeriodicTask(getTimeNowNt()); sleep(); } }
Definition at line 36 of file periodic_thread_controller.h.
Constructor & Destructor Documentation
◆ PeriodicController() [1/2]
|
inline |
Definition at line 82 of file periodic_thread_controller.h.
◆ PeriodicController() [2/2]
|
inline |
Definition at line 89 of file periodic_thread_controller.h.
Member Function Documentation
◆ OnStarted()
|
inlineprotectedvirtual |
Called before running the periodic task. Optionally override this method to set up.
Definition at line 47 of file periodic_thread_controller.h.
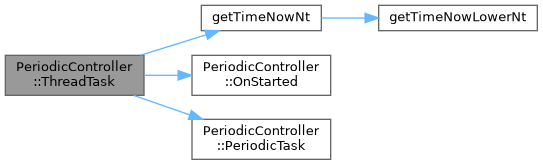
Referenced by PeriodicController< TStackSize >::ThreadTask().

◆ PeriodicTask()
|
protectedpure virtual |
Called periodically. Override this method to do work for your controller.
Implemented in CanWrite, and MainLoop.
Referenced by PeriodicController< TStackSize >::ThreadTask().

◆ setPeriod()
|
inline |
sets milliseconds period
Definition at line 95 of file periodic_thread_controller.h.
◆ ThreadTask()
|
inlinefinaloverrideprivatevirtual |
Implements ThreadController< TStackSize >.
Definition at line 55 of file periodic_thread_controller.h.
Field Documentation
◆ m_period
|
private |
Definition at line 40 of file periodic_thread_controller.h.
Referenced by PeriodicController< TStackSize >::ThreadTask().
The documentation for this class was generated from the following file:
- controllers/system/periodic_thread_controller.h