#include <main_loop_controller.h>
Inheritance diagram for MainLoop:
Collaboration diagram for MainLoop:
Public Member Functions | |
| MainLoop () | |
| void | PeriodicTask (efitick_t nowNt) override |
| Called periodically. Override this method to do work for your controller. | |
 Public Member Functions inherited from PeriodicController< 1024 > Public Member Functions inherited from PeriodicController< 1024 > | |
| PeriodicController (const char *name, tprio_t priority, float frequencyHz) | |
| PeriodicController (const char *name) | |
| void | setPeriod (int periodMs) |
| Public Member Functions inherited from ThreadController< TStackSize > | |
| ThreadController (const char *name, tprio_t priority) | |
| void | start () |
| Start the thread. | |
| void | stop () |
| Request thread termination and waits for termination. | |
Private Member Functions | |
| template<LoopPeriod TFlag> | |
| LoopPeriod | makePeriodFlag () const |
| LoopPeriod | makePeriodFlags () |
Private Attributes | |
| int | m_cycleCounter = 0 |
Additional Inherited Members | |
| Protected Member Functions inherited from PeriodicController< 1024 > | |
| virtual void | OnStarted () |
| Called before running the periodic task. Optionally override this method to set up. | |
| Protected Member Functions inherited from ThreadController< TStackSize > | |
| void | main () override |
| Protected Attributes inherited from ThreadController< TStackSize > | |
| const char *const | m_name |
Detailed Description
Definition at line 21 of file main_loop_controller.h.
Constructor & Destructor Documentation
◆ MainLoop()
| MainLoop::MainLoop | ( | ) |
Definition at line 10 of file main_loop.cpp.
12{
13}
Base class for a controller that needs to run periodically to perform work.
Definition periodic_thread_controller.h:37
Member Function Documentation
◆ makePeriodFlag()
template<LoopPeriod TFlag>
|
private |
Definition at line 16 of file main_loop.cpp.
16 {
18 return TFlag;
19 } else {
21 }
22}
@ None
◆ makePeriodFlags()
|
private |
Definition at line 24 of file main_loop.cpp.
24 {
26 m_cycleCounter = 0;
27 }
28
30 lp |= makePeriodFlag<LoopPeriod::Period1000hz>();
31 lp |= makePeriodFlag<LoopPeriod::Period500hz>();
32 lp |= makePeriodFlag<LoopPeriod::Period250hz>();
33 lp |= makePeriodFlag<LoopPeriod::Period200hz>();
34 lp |= makePeriodFlag<LoopPeriod::Period20hz>();
35
36 m_cycleCounter++;
37
38 return lp;
39}
Referenced by PeriodicTask().
Here is the caller graph for this function:

◆ PeriodicTask()
|
overridevirtual |
Called periodically. Override this method to do work for your controller.
Implements PeriodicController< 1024 >.
Definition at line 41 of file main_loop.cpp.
41 {
43
45
46#if HAL_USE_ADC
47 if (currentLoopPeriod & ADC_UPDATE_RATE) {
48 adcInputsUpdateSubscribers(nowNt);
49 }
50#endif // HAL_USE_ADC
51
52#if EFI_ELECTRONIC_THROTTLE_BODY
53 if (currentLoopPeriod & ETB_UPDATE_RATE) {
54 // TODO: main_loop etb callback
55 }
56#endif // EFI_ELECTRONIC_THROTTLE_BODY
57
58 if (currentLoopPeriod & SLOW_CALLBACK_RATE) {
59 //TODO: main_loop slow callback
60 }
61
62 if (currentLoopPeriod & FAST_CALLBACK_RATE) {
63 //TODO: main_loop fast callback
64 }
65}
void adcInputsUpdateSubscribers(efitick_t nowNt)
Definition adc_inputs.cpp:181
Definition perf_trace.h:109
@ MainLoop
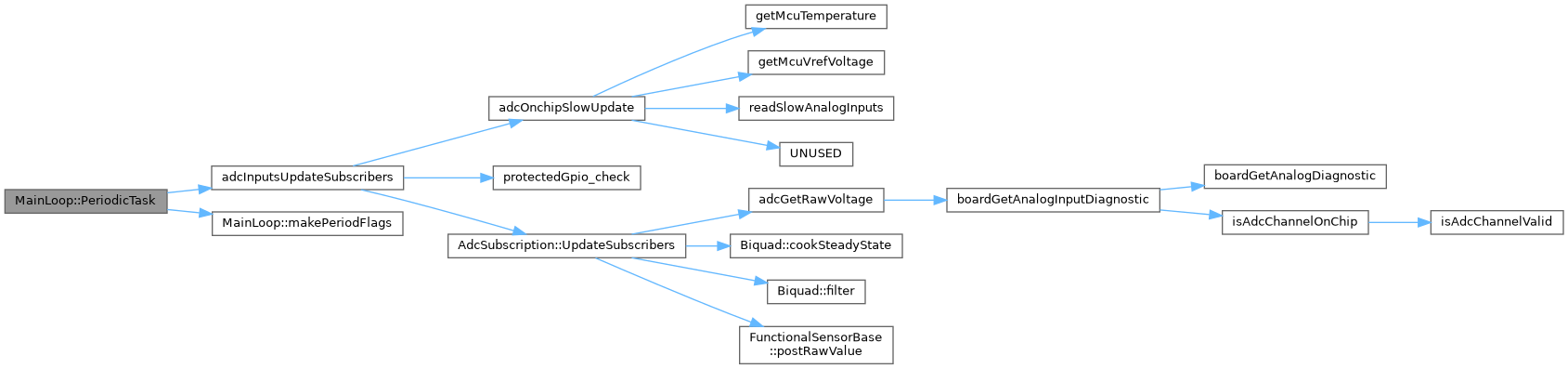
Here is the call graph for this function:
Field Documentation
◆ m_cycleCounter
|
private |
Definition at line 35 of file main_loop_controller.h.
Referenced by makePeriodFlag(), and makePeriodFlags().
The documentation for this class was generated from the following files:
- controllers/core/main_loop_controller.h
- controllers/core/main_loop.cpp