Detailed Description
TODO: change 'verbose' into 'broadcast'?
If you edit this file, please update rusEFI_CAN_verbose.dbc! Kvaser Database Editor works well for this task, and is free.
Definition in file can_verbose.cpp.
Functions | |
| void | populateFrame (Status &msg) |
| void | populateFrame (Status11 &msg) |
| void | populateFrame (Speeds &msg) |
| void | populateFrame (PedalAndTps &msg) |
| void | populateFrame (Sensors1 &msg) |
| void | populateFrame (Sensors2 &msg) |
| void | populateFrame (Fueling &msg) |
| void | populateFrame (Fueling2 &msg) |
| void | populateFrame (Fueling3 &msg) |
| void | populateFrame (PerCylinderKnock &msg) |
| void | populateFrame (Cams &msg) |
| void | populateFrame (Egts &msg) |
| void | sendCanVerbose () |
Function Documentation
◆ populateFrame() [1/12]
| void populateFrame | ( | Cams & | msg | ) |
Definition at line 227 of file can_verbose.cpp.

◆ populateFrame() [2/12]
| void populateFrame | ( | Egts & | msg | ) |
Definition at line 246 of file can_verbose.cpp.

◆ populateFrame() [3/12]
| void populateFrame | ( | Fueling & | msg | ) |
Definition at line 166 of file can_verbose.cpp.

◆ populateFrame() [4/12]
| void populateFrame | ( | Fueling2 & | msg | ) |
Definition at line 181 of file can_verbose.cpp.

◆ populateFrame() [5/12]
| void populateFrame | ( | Fueling3 & | msg | ) |
Definition at line 199 of file can_verbose.cpp.

◆ populateFrame() [6/12]
| void populateFrame | ( | PedalAndTps & | msg | ) |
Definition at line 109 of file can_verbose.cpp.

◆ populateFrame() [7/12]
| void populateFrame | ( | PerCylinderKnock & | msg | ) |
Definition at line 210 of file can_verbose.cpp.

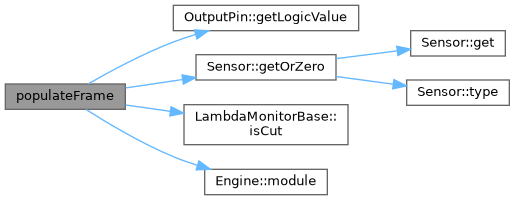
◆ populateFrame() [8/12]
| void populateFrame | ( | Sensors1 & | msg | ) |
Definition at line 127 of file can_verbose.cpp.
◆ populateFrame() [9/12]
| void populateFrame | ( | Sensors2 & | msg | ) |
Definition at line 152 of file can_verbose.cpp.

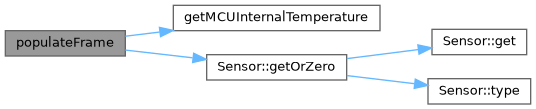
◆ populateFrame() [10/12]
| void populateFrame | ( | Speeds & | msg | ) |
Definition at line 87 of file can_verbose.cpp.
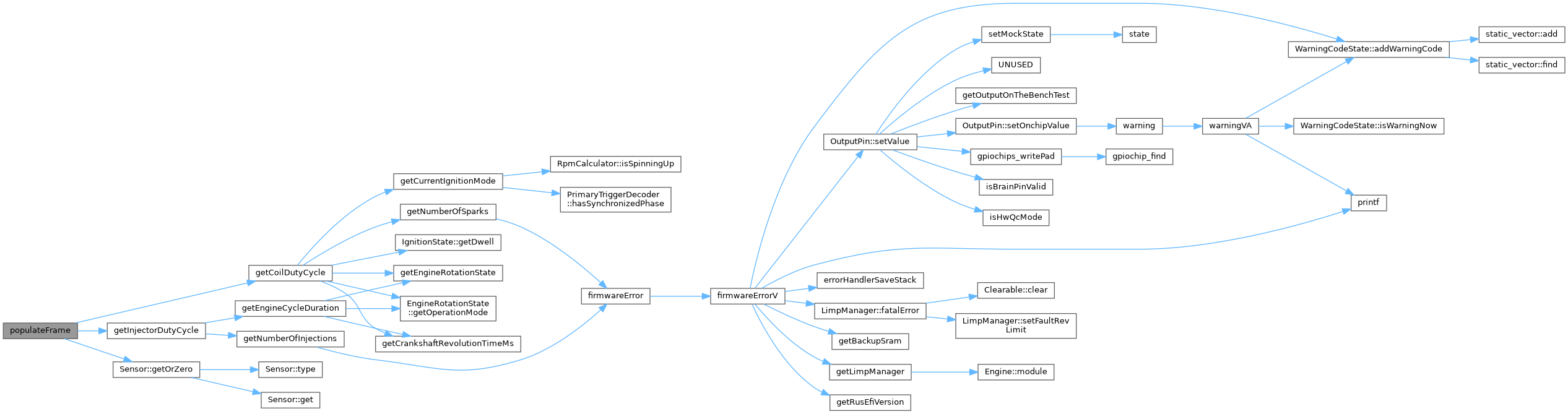
◆ populateFrame() [11/12]
| void populateFrame | ( | Status & | msg | ) |
Definition at line 47 of file can_verbose.cpp.
◆ populateFrame() [12/12]
| void populateFrame | ( | Status11 & | msg | ) |
Definition at line 74 of file can_verbose.cpp.
◆ sendCanVerbose()
| void sendCanVerbose | ( | ) |
Definition at line 252 of file can_verbose.cpp.
Referenced by CanWrite::PeriodicTask().

