Detailed Description
his file is about general input/output utility methods, not much EFI-specifics
- Date
- Jan 24, 2013
Definition in file io_pins.cpp.
Functions | |
| void | efiSetPadUnused (brain_pin_e brainPin) |
| void | efiSetPadMode (const char *msg, brain_pin_e brainPin, iomode_t mode) |
| void | efiSetPadModeWithoutOwnershipAcquisition (const char *msg, brain_pin_e brainPin, iomode_t mode) |
| bool | efiReadPin (brain_pin_e pin) |
| iomode_t | getInputMode (pin_input_mode_e mode) |
| void | writePad (const char *msg, brain_pin_e pin, int bit) |
| void | setMockState (brain_pin_e pin, bool state) |
| bool | efiIsInputPinInverted (pin_input_mode_e mode) |
| bool | efiReadPin (brain_pin_e pin, pin_input_mode_e mode) |
Variables | |
| bool | mockPinStates [BRAIN_PIN_COUNT] |
Function Documentation
◆ efiIsInputPinInverted()
| bool efiIsInputPinInverted | ( | pin_input_mode_e | mode | ) |
Definition at line 138 of file io_pins.cpp.
Referenced by efiReadPin().

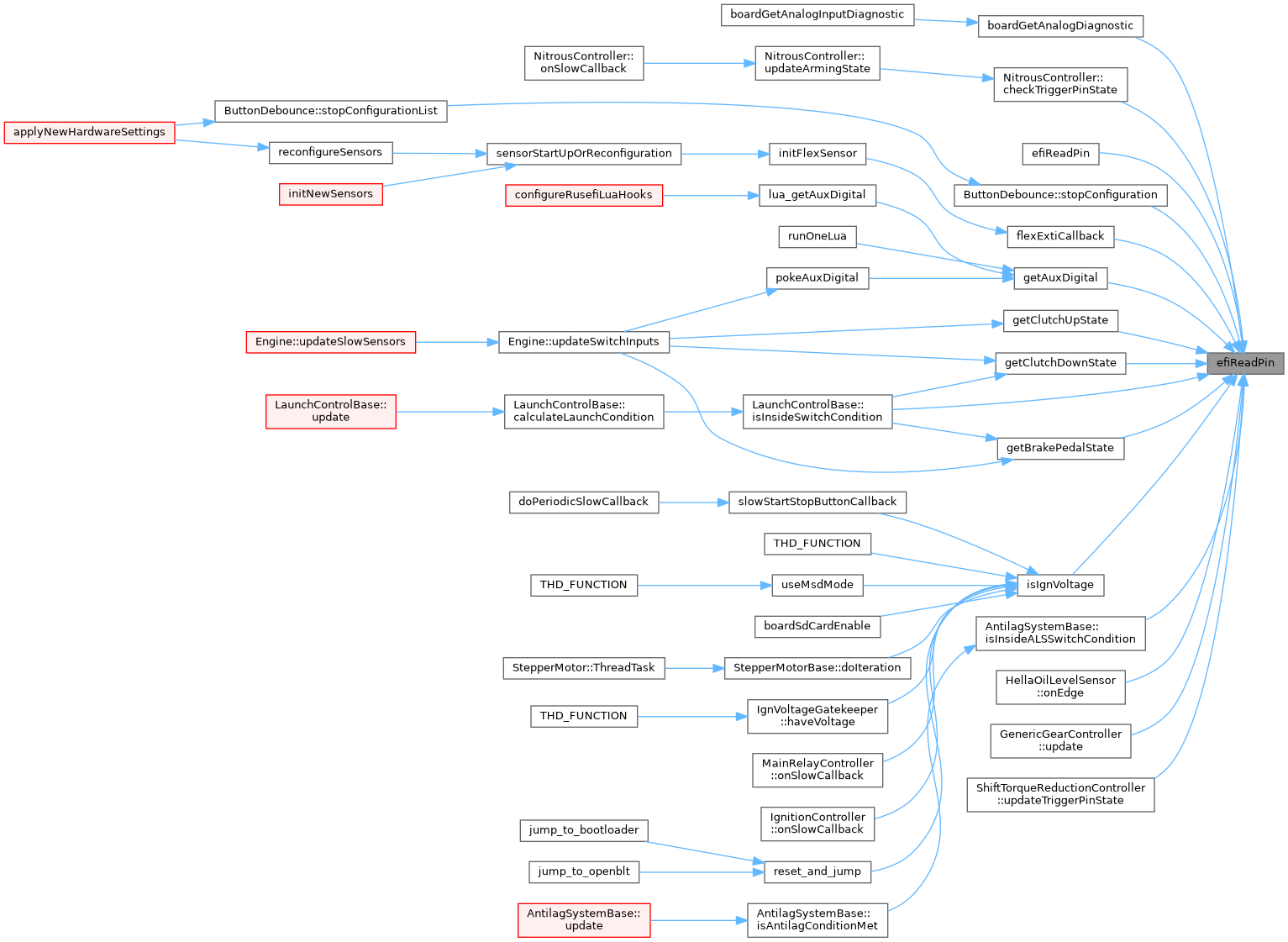
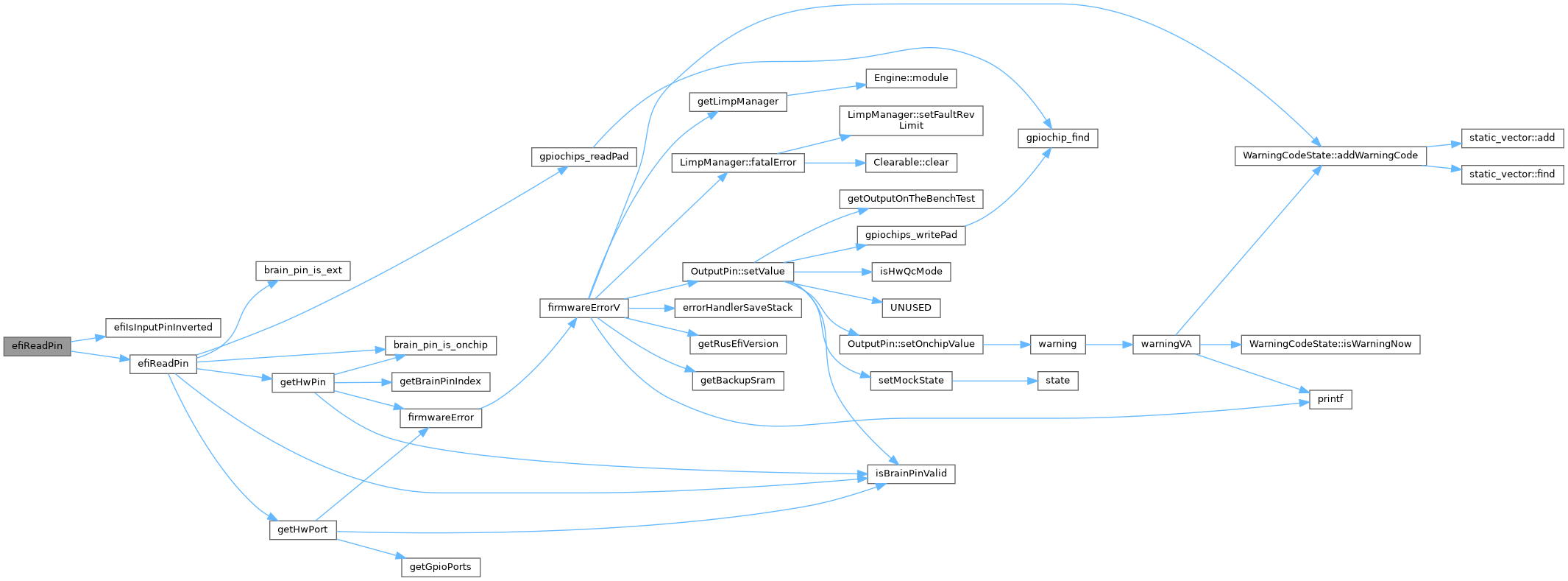
◆ efiReadPin() [1/2]
| bool efiReadPin | ( | brain_pin_e | pin | ) |
Definition at line 89 of file io_pins.cpp.
Referenced by boardGetAnalogDiagnostic(), NitrousController::checkTriggerPinState(), efiReadPin(), flexExtiCallback(), getAuxDigital(), getBrakePedalState(), getClutchDownState(), getClutchUpState(), isIgnVoltage(), AntilagSystemBase::isInsideALSSwitchCondition(), LaunchControlBase::isInsideSwitchCondition(), HellaOilLevelSensor::onEdge(), ButtonDebounce::stopConfiguration(), GenericGearController::update(), and ShiftTorqueReductionController::updateTriggerPinState().

◆ efiReadPin() [2/2]
| bool efiReadPin | ( | brain_pin_e | pin, |
| pin_input_mode_e | mode | ||
| ) |
◆ efiSetPadMode()
| void efiSetPadMode | ( | const char * | msg, |
| brain_pin_e | brainPin, | ||
| iomode_t | mode | ||
| ) |
This method would set an error condition if pin is already used
Definition at line 48 of file io_pins.cpp.

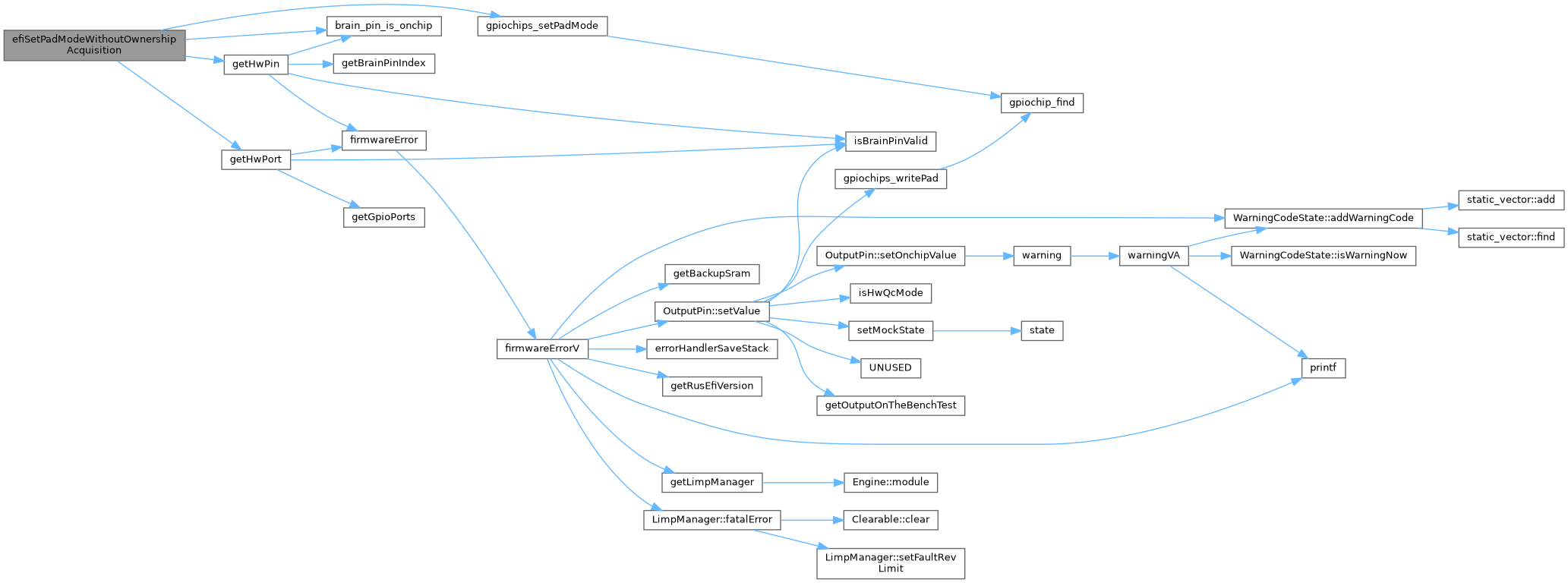
◆ efiSetPadModeWithoutOwnershipAcquisition()
| void efiSetPadModeWithoutOwnershipAcquisition | ( | const char * | msg, |
| brain_pin_e | brainPin, | ||
| iomode_t | mode | ||
| ) |
Definition at line 61 of file io_pins.cpp.
Referenced by benchSetPinValue(), efiSetPadMode(), initQcBenchControls(), initSettings(), qcSetEtbState(), and setPin().

◆ efiSetPadUnused()
| void efiSetPadUnused | ( | brain_pin_e | brainPin | ) |
Definition at line 20 of file io_pins.cpp.
Referenced by applyNewHardwareSettings(), OutputPin::deInit(), deInitIfValid(), ButtonDebounce::stopConfiguration(), stopKLine(), stopSent(), stopSmartCsPins(), and stopSpi().


◆ getInputMode()
| iomode_t getInputMode | ( | pin_input_mode_e | mode | ) |
Definition at line 103 of file io_pins.cpp.
Referenced by GenericGearController::init(), startInputPinIfValid(), and ButtonDebounce::stopConfiguration().

◆ setMockState()
| void setMockState | ( | brain_pin_e | pin, |
| bool | state | ||
| ) |
Definition at line 132 of file io_pins.cpp.
Referenced by OutputPin::setValue().


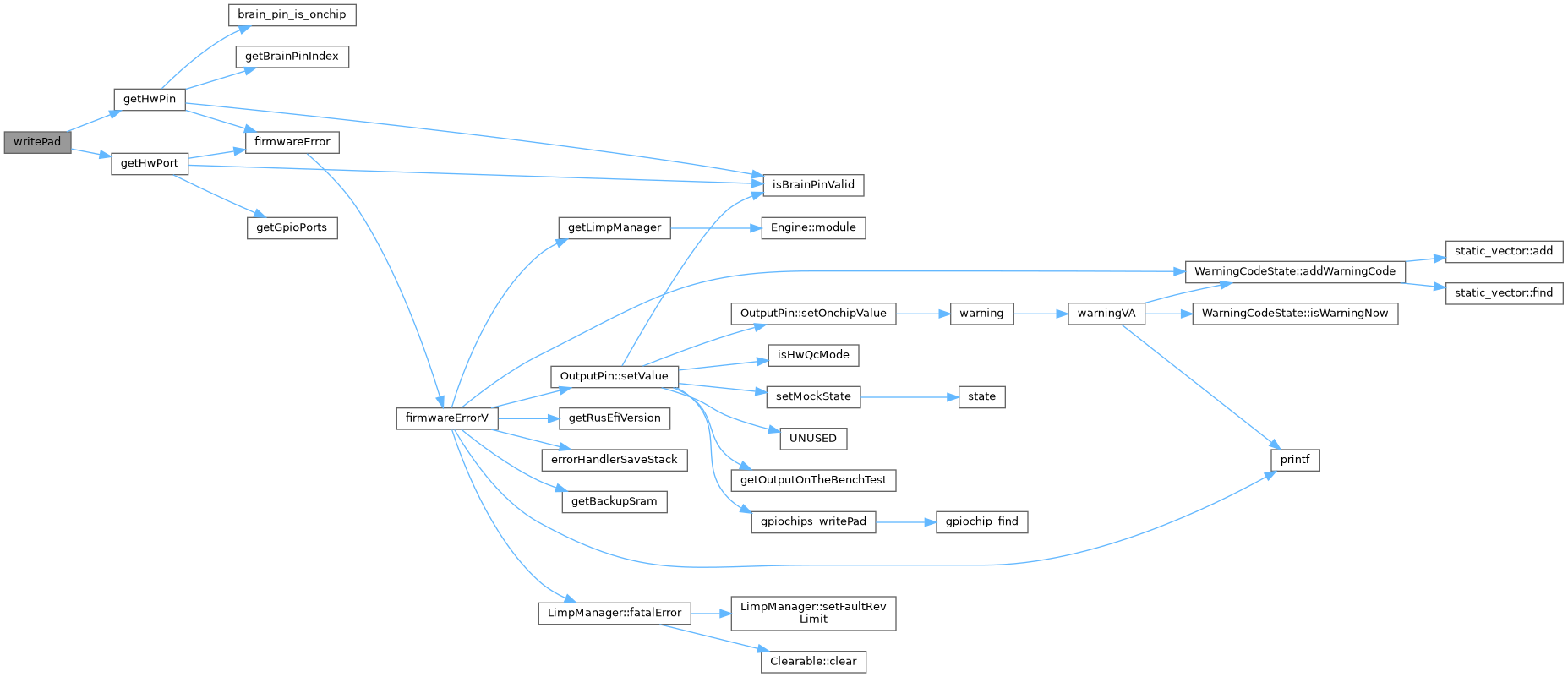
◆ writePad()
| void writePad | ( | const char * | msg, |
| brain_pin_e | pin, | ||
| int | bit | ||
| ) |
Variable Documentation
◆ mockPinStates
| bool mockPinStates[BRAIN_PIN_COUNT] |
Definition at line 126 of file io_pins.cpp.
Referenced by setMockState().