#include <high_pressure_fuel_pump.h>


Public Types | |
| using | interface_t = HpfpController |
Public Member Functions | |
| void | resetQuantity () |
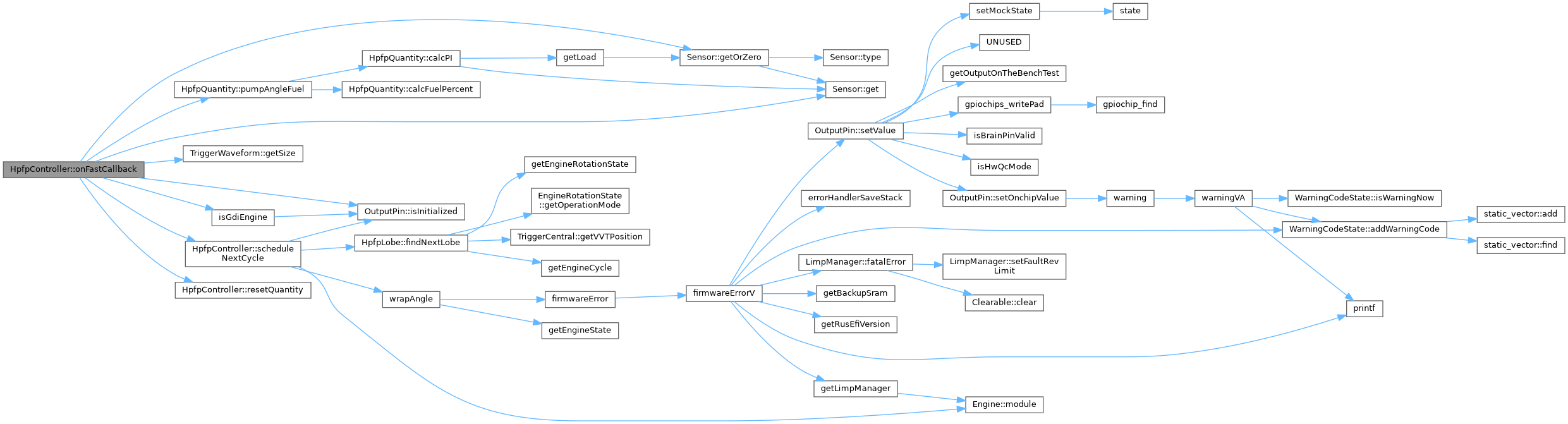
| void | onFastCallback () final |
 Public Member Functions inherited from EngineModule Public Member Functions inherited from EngineModule | |
| virtual void | initNoConfiguration () |
| virtual void | setDefaultConfiguration () |
| virtual void | onConfigurationChange (engine_configuration_s const *) |
| virtual void | onSlowCallback () |
| virtual void | onEngineStop () |
| virtual void | onIgnitionStateChanged (bool) |
| virtual bool | needsDelayedShutoff () |
| virtual void | onEnginePhase (float, efitick_t, angle_t, angle_t) |
Private Member Functions | |
| void | scheduleNextCycle () |
Static Private Member Functions | |
| static void | pinTurnOn (HpfpController *self) |
| static void | pinTurnOff (HpfpController *self) |
Private Attributes | |
| AngleBasedEvent | m_event |
| HpfpQuantity | m_quantity |
| HpfpLobe | m_lobe |
| volatile bool | m_running = false |
| Whether events are being scheduled or not. | |
Detailed Description
Definition at line 71 of file high_pressure_fuel_pump.h.
Member Typedef Documentation
◆ interface_t
Definition at line 74 of file high_pressure_fuel_pump.h.
Member Function Documentation
◆ onFastCallback()
|
finalvirtual |
Reimplemented from EngineModule.
Definition at line 153 of file high_pressure_fuel_pump.cpp.
◆ pinTurnOff()
|
staticprivate |
Definition at line 210 of file high_pressure_fuel_pump.cpp.

◆ pinTurnOn()
|
staticprivate |
Definition at line 190 of file high_pressure_fuel_pump.cpp.

◆ resetQuantity()
|
inline |
Reset internal state due to a stopped engine.
Definition at line 79 of file high_pressure_fuel_pump.h.
Referenced by onFastCallback().

◆ scheduleNextCycle()
|
private |
We are good to use just one m_event instance because new events are scheduled when we turn off valve.
Definition at line 218 of file high_pressure_fuel_pump.cpp.
Referenced by onFastCallback(), and pinTurnOff().


Field Documentation
◆ m_deadangle
| angle_t HpfpController::m_deadangle = 0 |
Computed solenoid deadtime in degrees.
Definition at line 85 of file high_pressure_fuel_pump.h.
Referenced by onFastCallback(), pinTurnOn(), and scheduleNextCycle().
◆ m_event
|
private |
Definition at line 90 of file high_pressure_fuel_pump.h.
Referenced by pinTurnOn(), and scheduleNextCycle().
◆ m_lobe
|
private |
Definition at line 93 of file high_pressure_fuel_pump.h.
Referenced by scheduleNextCycle().
◆ m_quantity
|
private |
Definition at line 92 of file high_pressure_fuel_pump.h.
Referenced by onFastCallback().
◆ m_running
|
private |
Whether events are being scheduled or not.
Definition at line 95 of file high_pressure_fuel_pump.h.
Referenced by onFastCallback(), and scheduleNextCycle().
The documentation for this class was generated from the following files:
- controllers/engine_cycle/high_pressure_fuel_pump.h
- controllers/engine_cycle/high_pressure_fuel_pump.cpp