#include <launch_control.h>

Public Member Functions | |
| LaunchControlBase () | |
| void | update () |
| float | getFuelCoefficient () const |
| bool | isInsideSpeedCondition () const |
| bool | isInsideTpsCondition () const |
| bool | isInsideSwitchCondition () |
| LaunchCondition | calculateRPMLaunchCondition (float rpm) |
| LaunchCondition | calculateLaunchCondition (float rpm) |
| bool | isLaunchSparkRpmRetardCondition () const |
| bool | isLaunchFuelRpmRetardCondition () const |
| float | getSparkSkipRatio () const |
Private Member Functions | |
| bool | isLaunchRpmRetardCondition () const |
| float | calculateSparkSkipRatio (float rpm) const |
Private Attributes | |
| float | sparkSkipRatio = 0.0f |
 Data Fields inherited from
Data Fields inherited from Detailed Description
Definition at line 20 of file launch_control.h.
Constructor & Destructor Documentation
◆ LaunchControlBase()
| LaunchControlBase::LaunchControlBase | ( | ) |
Definition at line 112 of file launch_control.cpp.
Member Function Documentation
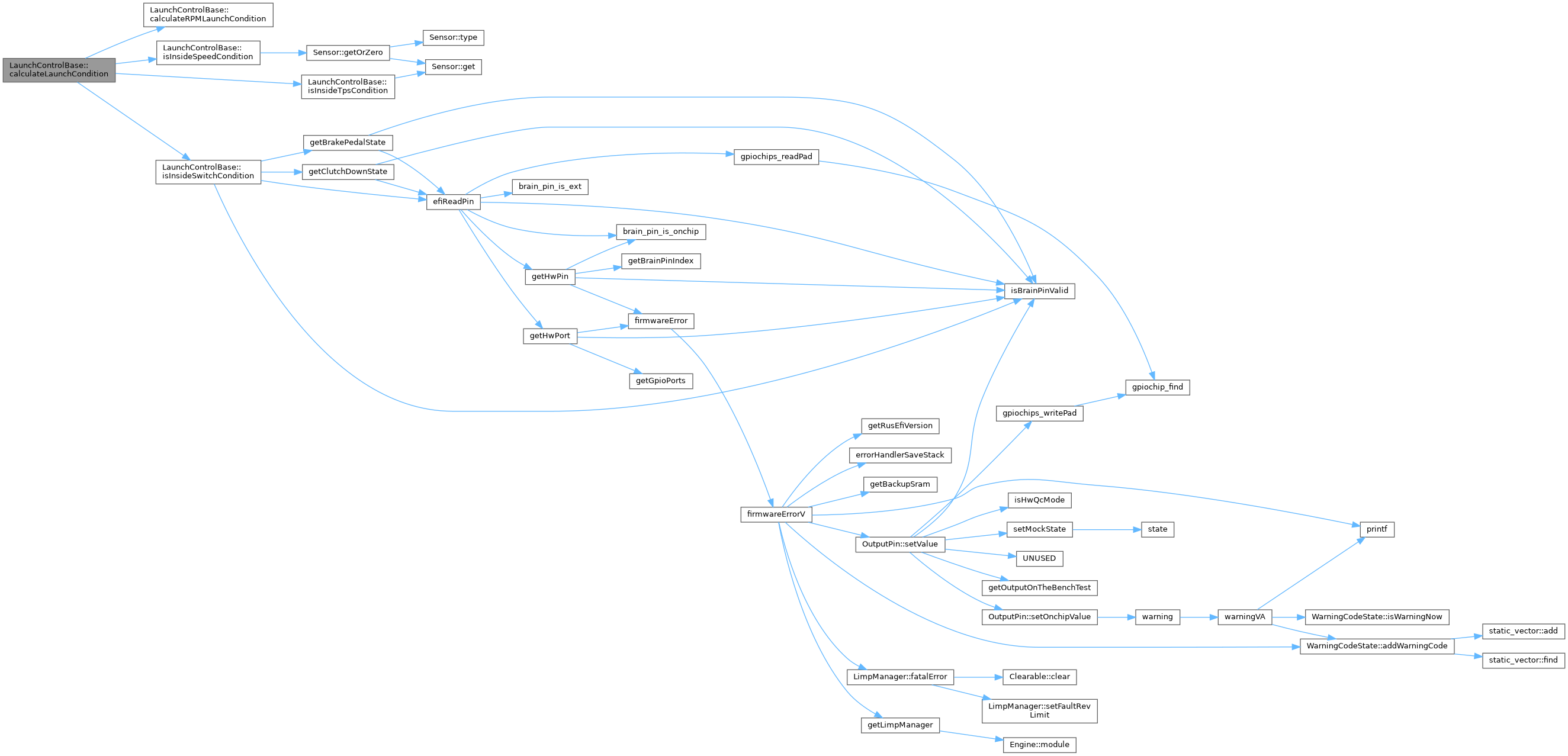
◆ calculateLaunchCondition()
| LaunchCondition LaunchControlBase::calculateLaunchCondition | ( | float | rpm | ) |
Definition at line 97 of file launch_control.cpp.
Referenced by update().

◆ calculateRPMLaunchCondition()
| LaunchCondition LaunchControlBase::calculateRPMLaunchCondition | ( | float | rpm | ) |
Definition at line 74 of file launch_control.cpp.
Referenced by calculateLaunchCondition().

◆ calculateSparkSkipRatio()
Definition at line 150 of file launch_control.cpp.
Referenced by update().


◆ getFuelCoefficient()
| float LaunchControlBase::getFuelCoefficient | ( | ) | const |
Definition at line 118 of file launch_control.cpp.
Referenced by getRunningFuel().

◆ getSparkSkipRatio()
|
inline |
Definition at line 36 of file launch_control.h.
Referenced by EngineState::updateSparkSkip().

◆ isInsideSpeedCondition()
| bool LaunchControlBase::isInsideSpeedCondition | ( | ) | const |
Returns True when Vehicle speed ALLOWS launch control
Definition at line 49 of file launch_control.cpp.
Referenced by calculateLaunchCondition().


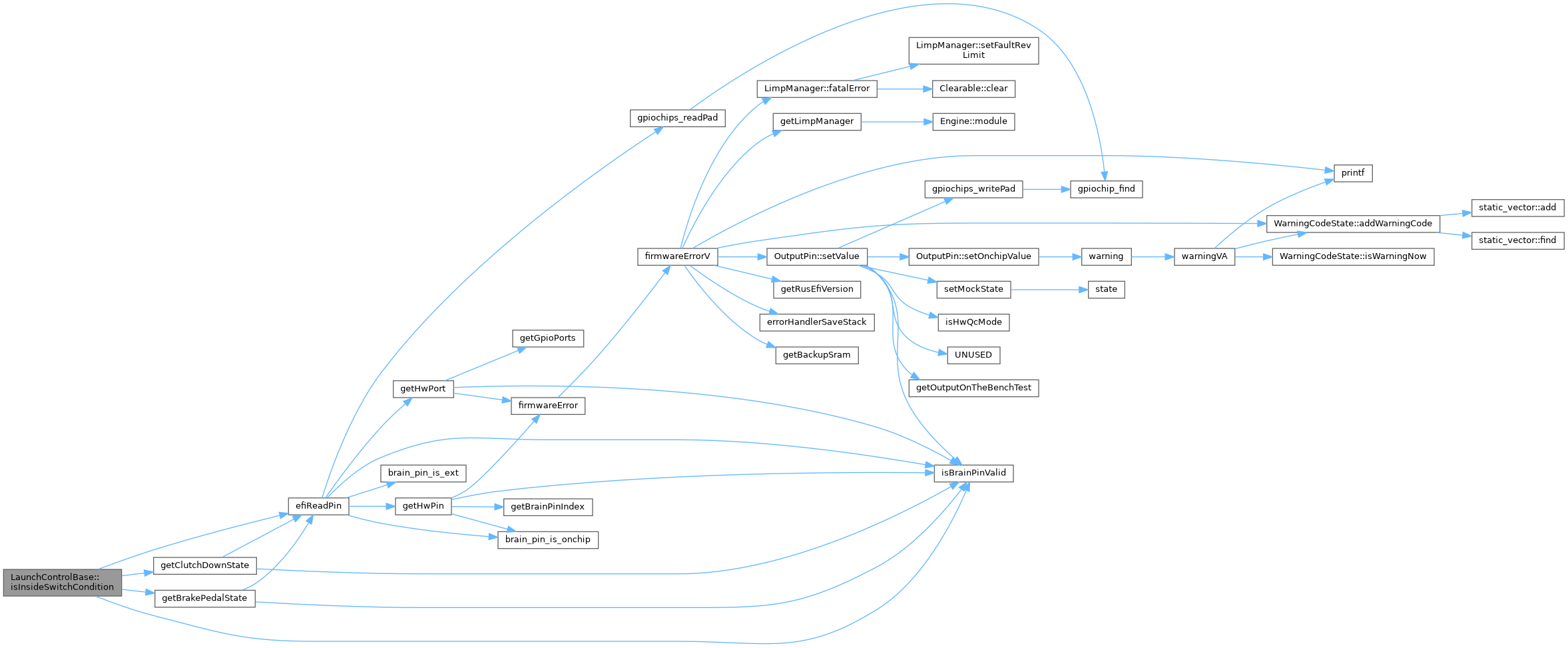
◆ isInsideSwitchCondition()
| bool LaunchControlBase::isInsideSwitchCondition | ( | ) |
We can have active condition from switch or from clutch. In case we are dependent on VSS we just return true.
Definition at line 22 of file launch_control.cpp.
Referenced by calculateLaunchCondition().

◆ isInsideTpsCondition()
| bool LaunchControlBase::isInsideTpsCondition | ( | ) | const |
Returns false if TPS is invalid or TPS > preset threshold
Definition at line 62 of file launch_control.cpp.
Referenced by calculateLaunchCondition().


◆ isLaunchFuelRpmRetardCondition()
| bool LaunchControlBase::isLaunchFuelRpmRetardCondition | ( | ) | const |
Definition at line 146 of file launch_control.cpp.
Referenced by LimpManager::updateState().


◆ isLaunchRpmRetardCondition()
|
private |
Definition at line 138 of file launch_control.cpp.
Referenced by isLaunchFuelRpmRetardCondition(), and isLaunchSparkRpmRetardCondition().


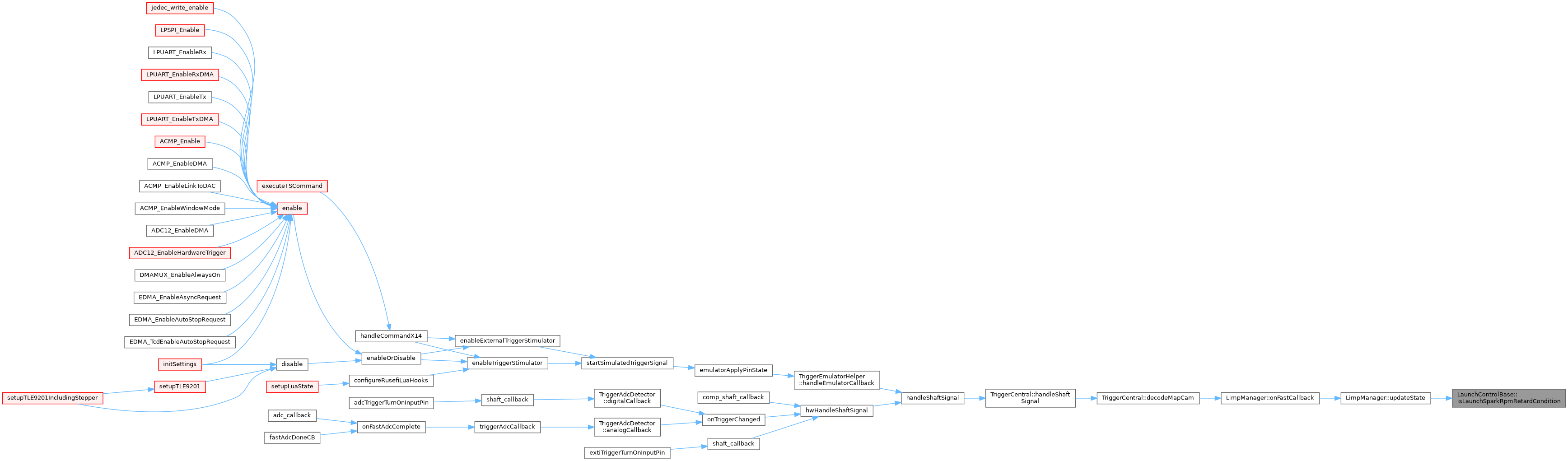
◆ isLaunchSparkRpmRetardCondition()
| bool LaunchControlBase::isLaunchSparkRpmRetardCondition | ( | ) | const |
Definition at line 142 of file launch_control.cpp.
Referenced by LimpManager::updateState().

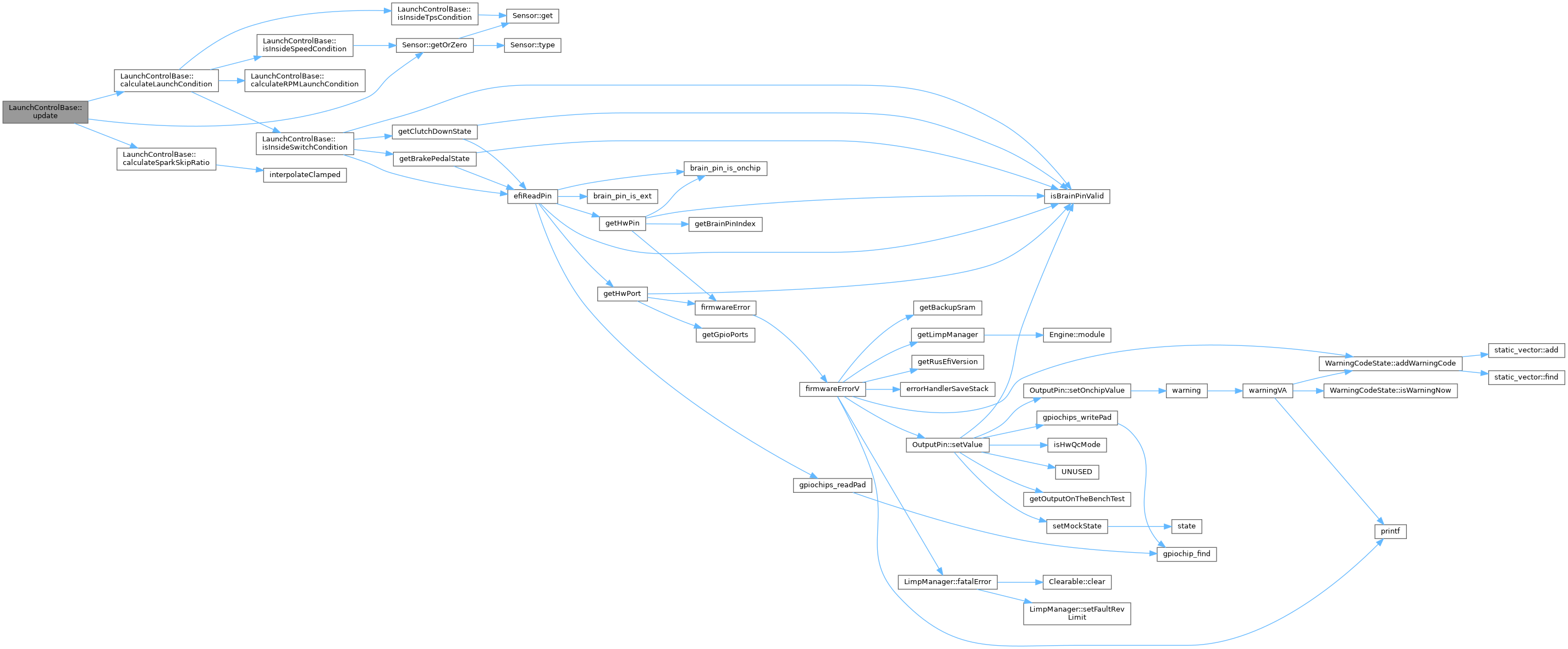
◆ update()
| void LaunchControlBase::update | ( | ) |
Definition at line 122 of file launch_control.cpp.
Referenced by EngineState::periodicFastCallback().

Field Documentation
◆ sparkSkipRatio
|
private |
Definition at line 44 of file launch_control.h.
Referenced by getSparkSkipRatio(), and update().
The documentation for this class was generated from the following files:
- controllers/algo/launch_control.h
- controllers/algo/launch_control.cpp