Data Structures | |
| struct | DynoPoint |
| class | DynoView |
Functions | |
| void | updateDynoView () |
| int | getDynoviewHP () |
| int | getDynoviewTorque () |
Function Documentation
◆ getDynoviewHP()
| int getDynoviewHP | ( | ) |
Definition at line 164 of file dynoview.cpp.
164 {
166}
Referenced by updateTunerStudioState().
Here is the caller graph for this function:

◆ getDynoviewTorque()
| int getDynoviewTorque | ( | ) |
Definition at line 168 of file dynoview.cpp.
168 {
170}
Referenced by updateTunerStudioState().
Here is the caller graph for this function:

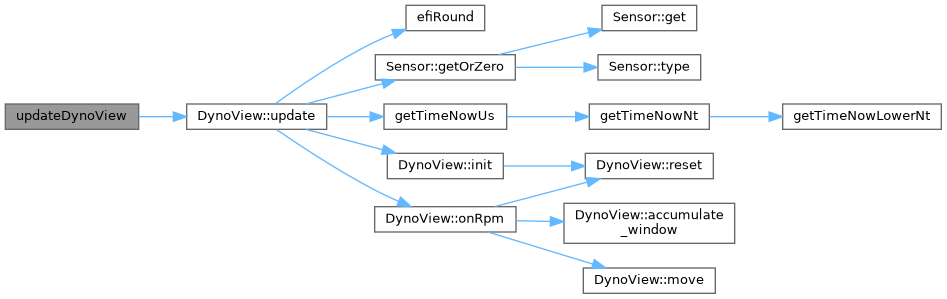
◆ updateDynoView()
| void updateDynoView | ( | ) |
Periodic update function called from SlowCallback.
Definition at line 175 of file dynoview.cpp.
175 {
177}
Referenced by Engine::periodicSlowCallback().
Here is the call graph for this function:
Here is the caller graph for this function:
