Detailed Description
- Date
- Nov 15, 2013
Definition in file ego.h.
Functions | |
| float | getAfr (SensorType type) |
| bool | hasAfrSensor () |
| void | setEgoSensor (ego_sensor_e type) |
Variables | |
| StoredValueSensor | smoothedLambda1Sensor |
| StoredValueSensor | smoothedLambda2Sensor |
| ExpAverage | expAverageLambda1 |
| ExpAverage | expAverageLambda2 |
Function Documentation
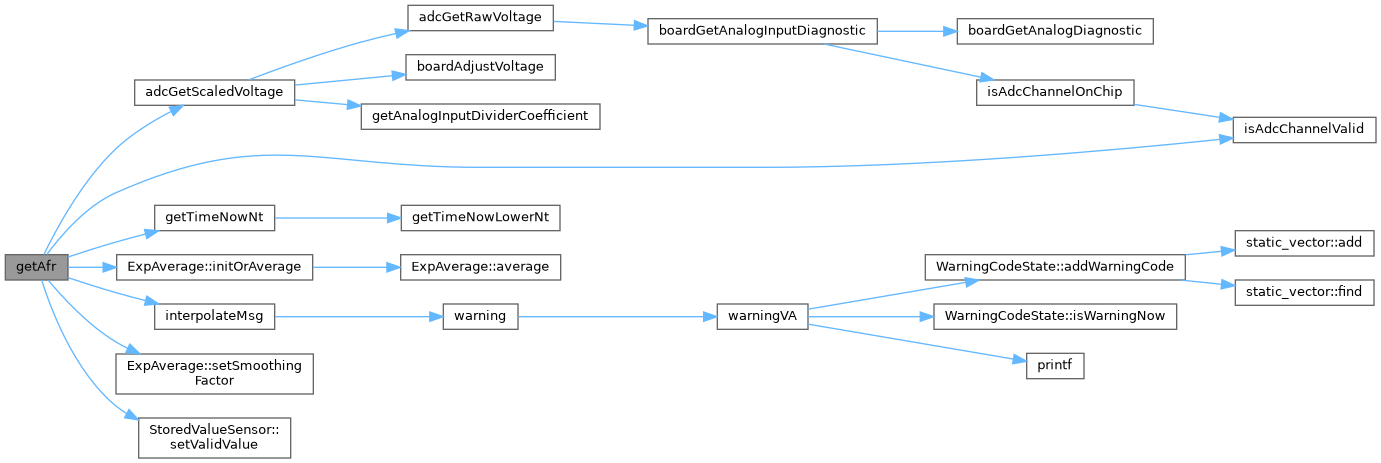
◆ getAfr()
| float getAfr | ( | SensorType | type | ) |
Definition at line 25 of file ego.cpp.
25 {
27
28 if (!isAdcChannelValid(type == SensorType::Lambda1 ? engineConfiguration->afr.hwChannel : engineConfiguration->afr.hwChannel2)) {
29 return 0;
30 }
31
32 auto volts = adcGetScaledVoltage("ego", type == SensorType::Lambda1 ? sensor->hwChannel : sensor->hwChannel2);
33
34 float interpolatedAfr = interpolateMsg("AFR", sensor->v1, sensor->value1, sensor->v2, sensor->value2, volts.value_or(0));
35
36 switch (type) {
39 smoothedLambda1Sensor.setValidValue(expAverageLambda1.initOrAverage(interpolatedAfr), getTimeNowNt());
40 break;
41 }
44 smoothedLambda2Sensor.setValidValue(expAverageLambda2.initOrAverage(interpolatedAfr), getTimeNowNt());
45 break;
46 }
47 default:
48 break;
49 }
50
51 return interpolateMsg("AFR", sensor->v1, sensor->value1, sensor->v2, sensor->value2, volts.value_or(0))
53}
expected< float > adcGetScaledVoltage(const char *msg, adc_channel_e hwChannel)
Definition adc_inputs.cpp:91
void setSmoothingFactor(float p_smoothingFactor)
Definition exp_average.h:26
void setValidValue(float value, efitick_t timestamp)
Definition stored_value_sensor.h:72
float interpolateMsg(const char *msg, float x1, float y1, float x2, float y2, float x)
Linear interpolation by two points.
Definition interpolation.cpp:28
StoredValueSensor smoothedLambda2Sensor(SensorType::SmoothedLambda2, MS2NT(500))
StoredValueSensor smoothedLambda1Sensor(SensorType::SmoothedLambda1, MS2NT(500))
static constexpr engine_configuration_s * engineConfiguration
Definition engine_configuration.h:80
static Lps25Sensor sensor(device)
@ Lambda1
@ Lambda2
adc_channel_e hwChannel
afr_sensor_s afr
float egoValueShift
float afrExpAverageAlpha
Here is the call graph for this function:
◆ hasAfrSensor()
| bool hasAfrSensor | ( | ) |

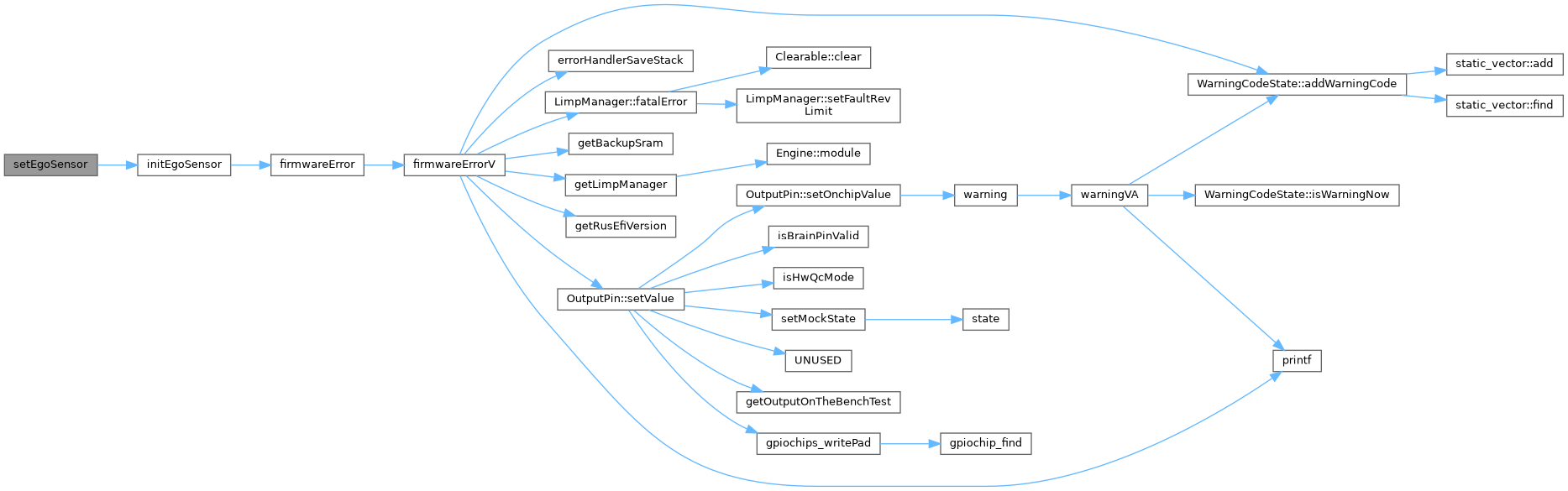
◆ setEgoSensor()
| void setEgoSensor | ( | ego_sensor_e | type | ) |
Definition at line 100 of file ego.cpp.
100 {
103}
static void initEgoSensor(afr_sensor_s *sensor, ego_sensor_e type)
Definition ego.cpp:56
ego_sensor_e afr_type
Referenced by setDefaultEngineConfiguration(), and setVwAba().
Here is the call graph for this function:
Here is the caller graph for this function:

Variable Documentation
◆ expAverageLambda1
|
extern |
Definition at line 12 of file ego.cpp.
Referenced by getAfr(), and AemXSeriesWideband::refreshSmoothedLambda().
◆ expAverageLambda2
|
extern |
Definition at line 13 of file ego.cpp.
Referenced by getAfr(), and AemXSeriesWideband::refreshSmoothedLambda().
◆ smoothedLambda1Sensor
|
extern |
◆ smoothedLambda2Sensor
|
extern |