Detailed Description
GPS receiver hardware UART driver.
Tested and developed for NEO-6M http://www.u-blox.com/en/gps-modules/pvt-modules/previous-generations/neo-6-family.html Technically any UART GPS should work with this driver since NMEA protocol is pretty common anyway
- Date
- Dec 28, 2013
Definition in file gps_uart.cpp.
Functions | |
| static | THD_WORKING_AREA (gpsThreadStack, UTILITY_THREAD_STACK_SIZE) |
| float | getCurrentSpeed (void) |
| static void | printGpsInfo () |
| static void | onGpsMessage (const char *const buffer) |
| static | THD_FUNCTION (GpsThreadEntryPoint, arg) |
| static bool | isGpsEnabled () |
| void | initGps (void) |
Variables | |
| static SerialConfig | GPSserialConfig = { GPS_SERIAL_SPEED, 0, USART_CR2_STOP1_BITS | USART_CR2_LINEN, 0 } |
| static loc_t | GPSdata |
| static efidatetime_t | lastDateTime |
| static int | gpsMessageCount = 0 |
| static int | uartErrors = 0 |
| static char | gps_str [GPS_MAX_STRING] |
Function Documentation
◆ getCurrentSpeed()
| float getCurrentSpeed | ( | void | ) |
Definition at line 38 of file gps_uart.cpp.
Referenced by printGpsInfo().

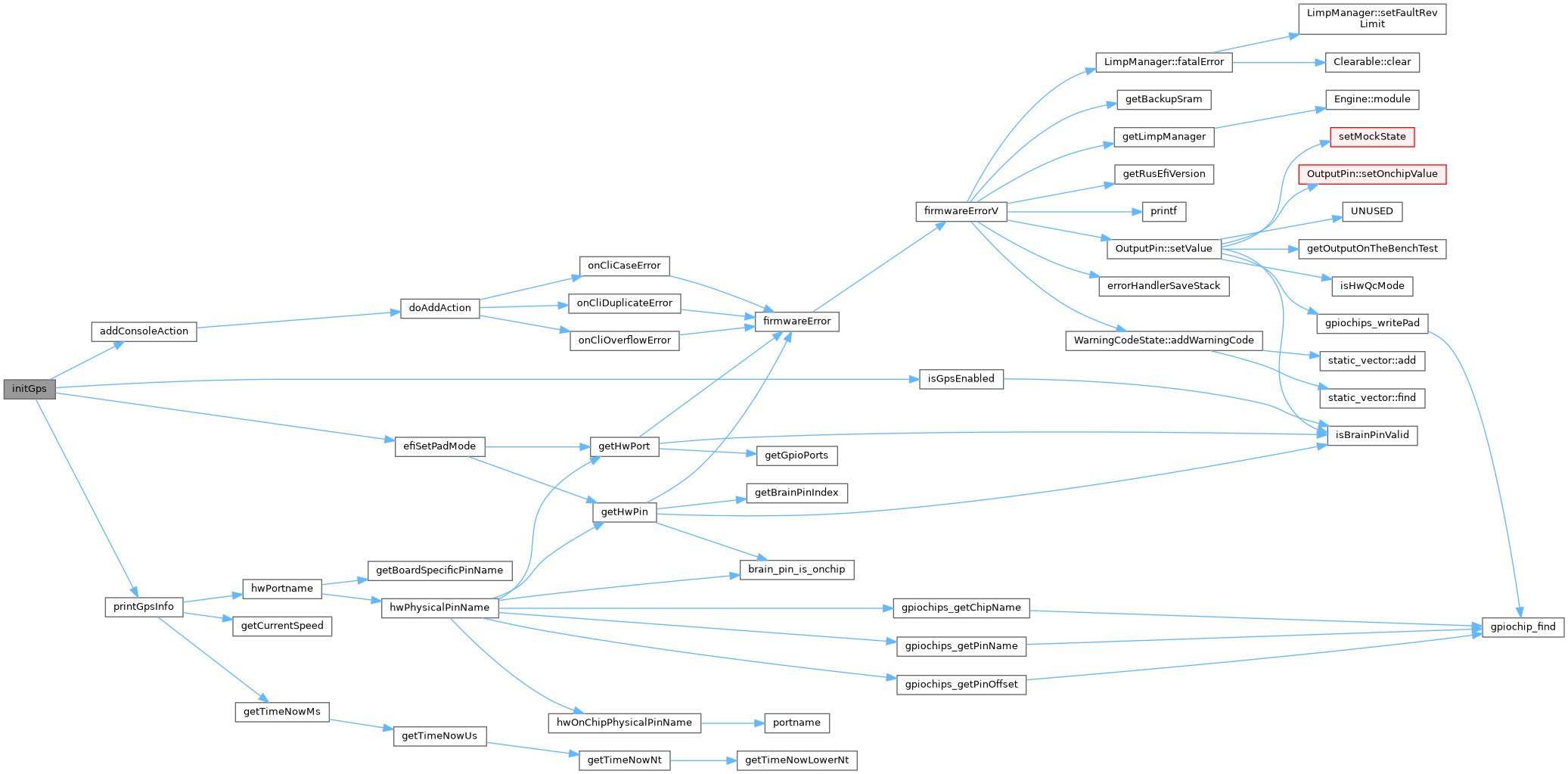
◆ initGps()
| void initGps | ( | void | ) |
Definition at line 102 of file gps_uart.cpp.
Referenced by initHardware().

◆ isGpsEnabled()
|
static |
Definition at line 97 of file gps_uart.cpp.
Referenced by initGps().


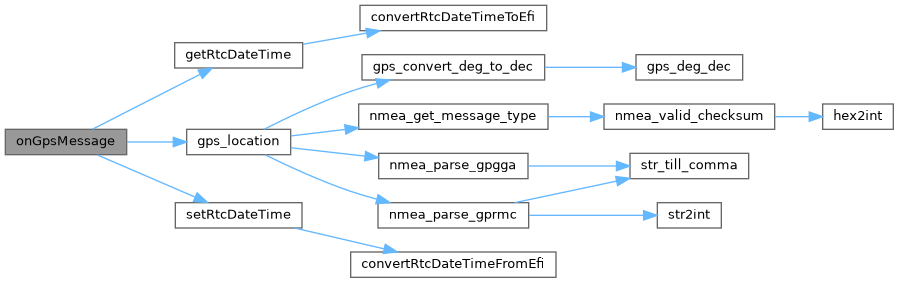
◆ onGpsMessage()
|
static |
Definition at line 56 of file gps_uart.cpp.
Referenced by THD_FUNCTION().

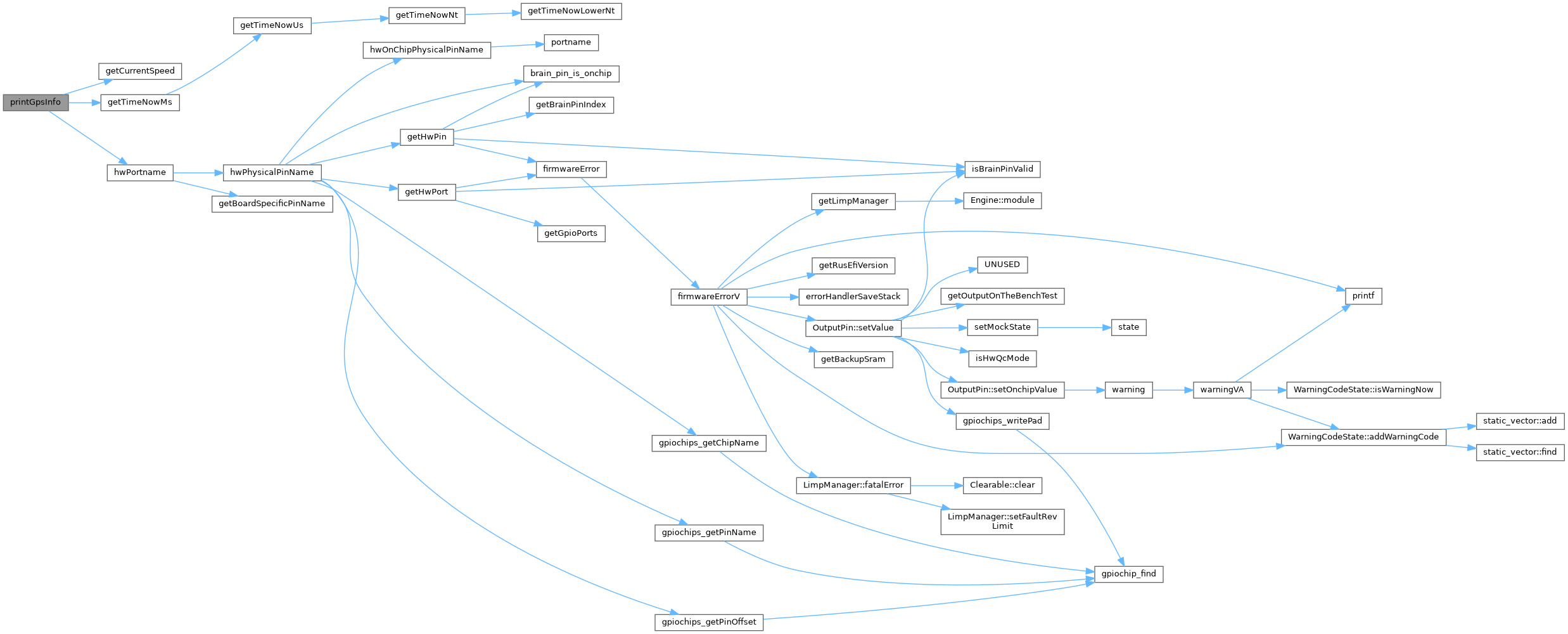
◆ printGpsInfo()
|
static |
Definition at line 43 of file gps_uart.cpp.
Referenced by initGps().

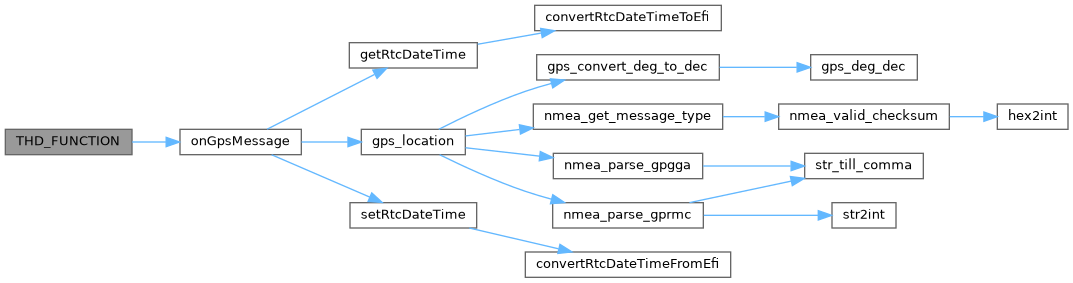
◆ THD_FUNCTION()
|
static |
Definition at line 73 of file gps_uart.cpp.
◆ THD_WORKING_AREA()
|
static |
Variable Documentation
◆ gps_str
|
static |
Definition at line 71 of file gps_uart.cpp.
Referenced by THD_FUNCTION().
◆ GPSdata
|
static |
Definition at line 30 of file gps_uart.cpp.
Referenced by getCurrentSpeed(), onGpsMessage(), and printGpsInfo().
◆ gpsMessageCount
|
static |
Definition at line 33 of file gps_uart.cpp.
Referenced by onGpsMessage(), and printGpsInfo().
◆ GPSserialConfig
|
static |
Definition at line 26 of file gps_uart.cpp.
Referenced by initGps().
◆ lastDateTime
|
static |
Definition at line 31 of file gps_uart.cpp.
Referenced by onGpsMessage().
◆ uartErrors
|
static |
Definition at line 34 of file gps_uart.cpp.
Referenced by printGpsInfo().