Functions | |
| void | initGps (void) |
| float | getCurrentSpeed (void) |
Function Documentation
◆ getCurrentSpeed()
| float getCurrentSpeed | ( | void | ) |
Definition at line 38 of file gps_uart.cpp.
38 {
39 // TODO: ???
41}
Referenced by printGpsInfo().
Here is the caller graph for this function:

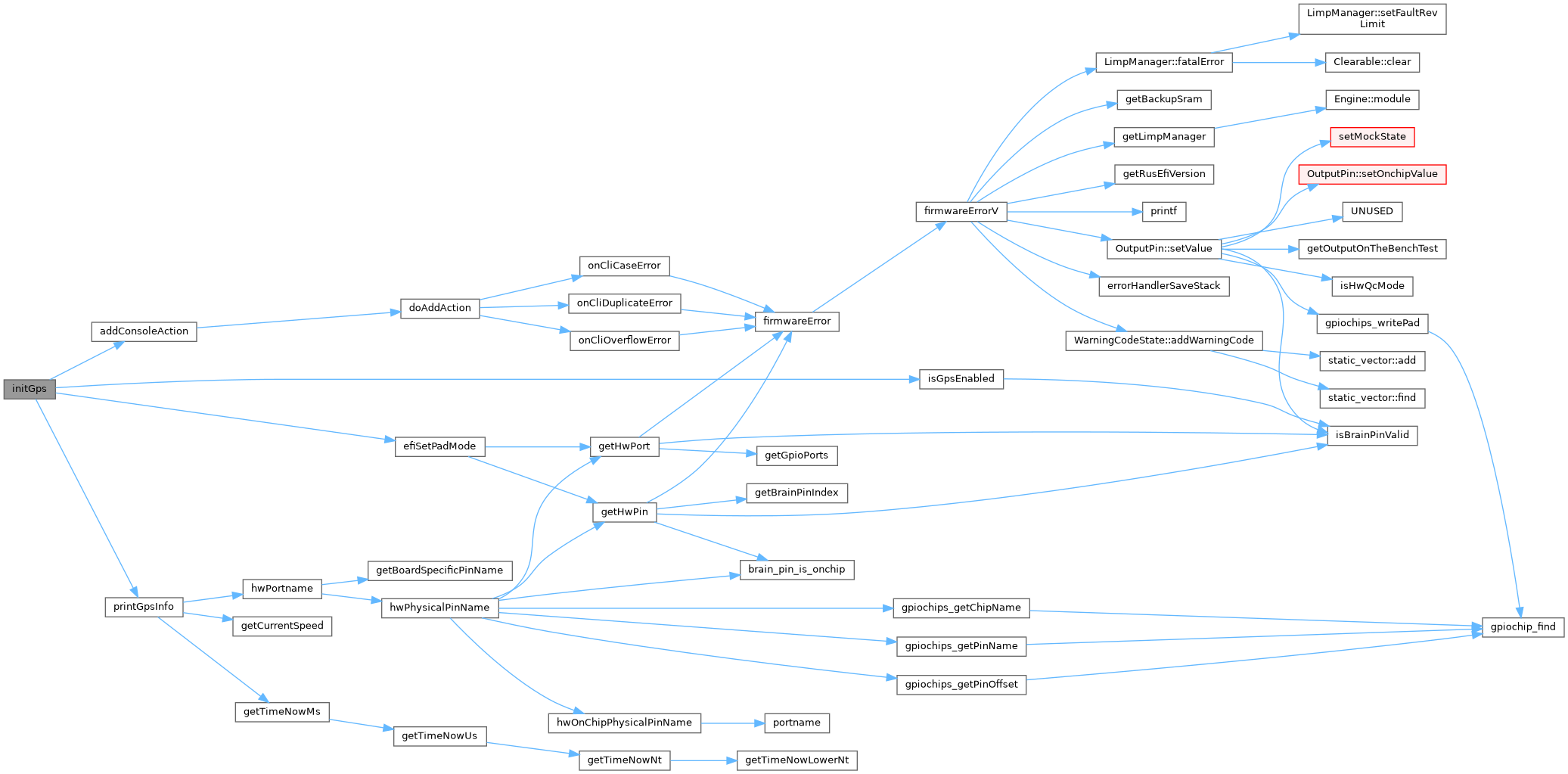
◆ initGps()
| void initGps | ( | void | ) |
Definition at line 102 of file gps_uart.cpp.
102 {
104 return;
105
106
107 sdStart(GPS_SERIAL_DEVICE, &GPSserialConfig);
108// GPS we have USART1: PB7 -> USART1_RX and PB6 -> USART1_TX
111
112// todo: add a thread which would save location. If the GPS 5Hz - we should save the location each 200 ms
113 chThdCreateStatic(gpsThreadStack, sizeof(gpsThreadStack), LOWPRIO, (tfunc_t)(void*) GpsThreadEntryPoint, NULL);
114
116}
void efiSetPadMode(const char *msg, brain_pin_e brainPin, iomode_t mode)
Definition bootloader_main.cpp:207
void addConsoleAction(const char *token, Void callback)
Register console action without parameters.
Definition cli_registry.cpp:91
static constexpr engine_configuration_s * engineConfiguration
Definition engine_configuration.h:80
Referenced by initHardware().
Here is the call graph for this function:
Here is the caller graph for this function:
