Functions | |
| static ObdCode | getCode (SensorType type, UnexpectedCode code) |
| const char * | describeUnexpected (UnexpectedCode code) |
| static void | check (SensorType type) |
| static ObdCode | getCodeForInjector (int idx, brain_pin_diag_e diag) |
| static ObdCode | getCodeForIgnition (int idx, brain_pin_diag_e diag) |
| static uint8_t | getTSErrorCode (brain_pin_diag_e diag) |
| PUBLIC_API_WEAK void | boardSensorChecker () |
Function Documentation
◆ boardSensorChecker()
| PUBLIC_API_WEAK void boardSensorChecker | ( | ) |
Definition at line 167 of file sensor_checker.cpp.
167 {
168}
Referenced by SensorChecker::onSlowCallback().
Here is the caller graph for this function:

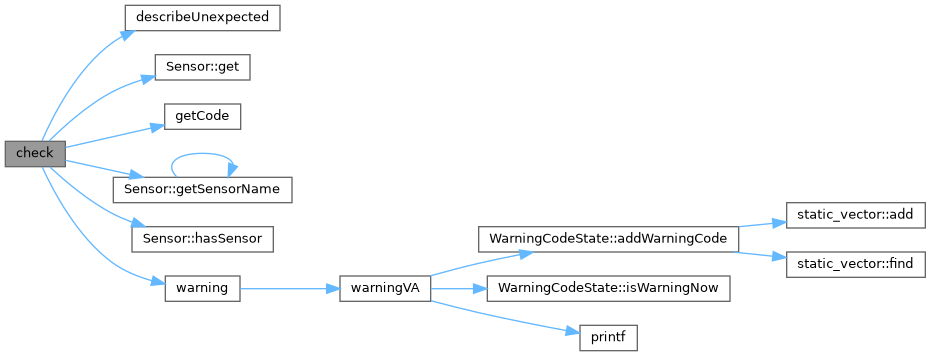
◆ check()
|
static |
Definition at line 104 of file sensor_checker.cpp.
104 {
105 // Don't check sensors we don't have
107 return;
108 }
109
111
112 // If the sensor is OK, nothing to check.
113 if (result) {
114 return;
115 }
116
118
120 warning(code, "Sensor fault: %s %s", Sensor::getSensorName(type), describeUnexpected(result.Code));
121 }
122}
virtual SensorResult get() const =0
@ None
const char * describeUnexpected(UnexpectedCode code)
Definition sensor_checker.cpp:91
Referenced by SensorChecker::onSlowCallback().
Here is the call graph for this function:
Here is the caller graph for this function:

◆ describeUnexpected()
|
inline |
Definition at line 91 of file sensor_checker.cpp.
91 {
93 case UnexpectedCode::Timeout: return "has timed out";
94 case UnexpectedCode::High: return "input too high";
95 case UnexpectedCode::Low: return "input too low";
96 case UnexpectedCode::Inconsistent: return "is inconsistent";
97 case UnexpectedCode::Configuration: return "is misconfigured";
98 case UnexpectedCode::Unknown:
99 default:
100 return "unknown";
101 }
102}
Referenced by check().
Here is the caller graph for this function:

◆ getCode()
|
static |
Definition at line 4 of file sensor_checker.cpp.
4 {
5 switch (type) {
13 default: break;
14 } break;
20 default: break;
21 } break;
29 default: break;
30 } break;
36 default: break;
37 } break;
38
46 default: break;
47 } break;
53 default: break;
54 } break;
55
61 default: break;
62 } break;
68 default: break;
69 } break;
75 default: break;
76 } break;
82 default: break;
83 } break;
84 default:
85 break;
86 }
87
89}
@ OBD_Clt_Timeout
@ OBD_Map_High
@ OBD_Iat_High
@ OBD_Iat_Low
@ OBD_TPS1_Secondary_High
@ OBD_TPS1_Primary_Low
@ OBD_TPS2_Secondary_Low
@ OBD_PPS_Primary_Timeout
@ OBD_TPS1_Primary_High
@ OBD_PPS_Primary_High
@ OBD_TPS2_Secondary_High
@ OBD_TPS2_Primary_Low
@ OBD_TPS1_Correlation
@ OBD_PPS_Secondary_High
@ OBD_FlexSensor_High
@ OBD_TPS2_Primary_Timeout
@ OBD_TPS1_Secondary_Timeout
@ OBD_Clt_High
@ OBD_TPS2_Primary_High
@ OBD_TPS2_Correlation
@ OBD_PPS_Correlation
@ OBD_TPS1_Primary_Timeout
@ OBD_Map_Timeout
@ OBD_PPS_Secondary_Low
@ OBD_PPS_Secondary_Timeout
@ OBD_PPS_Primary_Low
@ OBD_FlexSensor_Low
@ OBD_Map_Low
@ OBD_TPS1_Secondary_Low
@ OBD_TPS2_Secondary_Timeout
@ OBD_FlexSensor_Timeout
@ OBD_Clt_Low
@ OBD_Iat_Timeout
@ FuelEthanolPercent
@ AcceleratorPedal
@ Tps1Secondary
@ Iat
@ AcceleratorPedalPrimary
@ Map
@ Tps2Secondary
@ AcceleratorPedalSecondary
@ Clt
@ Tps2Primary
@ Tps2
@ Tps1
@ Tps1Primary
Referenced by check().
Here is the caller graph for this function:

◆ getCodeForIgnition()
|
static |
Definition at line 142 of file sensor_checker.cpp.
142 {
143 if (idx < 0 || idx >= MAX_CYLINDER_COUNT) {
145 }
146
147 // TODO: do something more intelligent with `diag`?
148 UNUSED(diag);
149
151}
UNUSED(samplingTimeSeconds)
@ OBD_Ignition_Circuit_1
Referenced by SensorChecker::onSlowCallback().
Here is the call graph for this function:

Here is the caller graph for this function:

◆ getCodeForInjector()
|
static |
Definition at line 126 of file sensor_checker.cpp.
126 {
127 if (idx < 0 || idx >= MAX_CYLINDER_COUNT) {
129 }
130
131 if ((diag & PIN_OPEN) || (diag & PIN_SHORT_TO_GND)) {
133 } else if ((diag & PIN_SHORT_TO_BAT) || (diag & PIN_OVERLOAD)) {
135 }
136
137 /* else common error code */
139}
@ OBD_Injector_Circuit_1
@ OBD_Injector_Circuit_1_High
@ OBD_Injector_Circuit_1_Low
Referenced by SensorChecker::onSlowCallback().
Here is the caller graph for this function:

◆ getTSErrorCode()
|
static |
Definition at line 153 of file sensor_checker.cpp.
153 {
154 /* Error codes reported to TS:
155 * 0 - output is not used
156 * 1 - ok status/no diagnostic available (TODO: separate codes)
157 * >1 - see brain_pin_diag_e, first least significant 1-bit position + 1 *
158 * Keep in sync with outputDiagErrorList in tunerstudio.template.ini
159 * Note:
160 * diag can be combination of few errors,
161 * while we report only one error to simplify handling on TS side
162 * find position of least significant 1-bit */
163 return __builtin_ffs(diag) + TS_ENUM_OFFSET;
164}
Referenced by SensorChecker::onSlowCallback().
Here is the caller graph for this function:
