#include <lua_pid.h>
Public Member Functions | |
| LuaIndustrialPid ()=default | |
| LuaIndustrialPid (float kp, float ki, float kd, float min, float max) | |
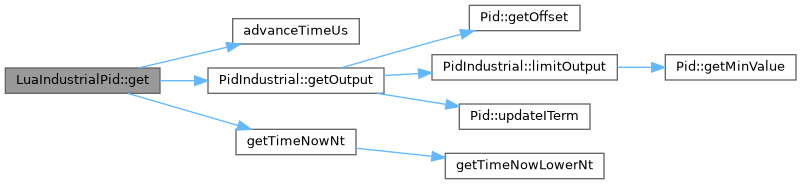
| float | get (float target, float input) |
| void | setOffset (float offset) |
| void | setDerivativeFilterLoss (float derivativeFilterLoss) |
| void | setAntiwindupFreq (float antiwindupFreq) |
| void | reset () |
Private Attributes | |
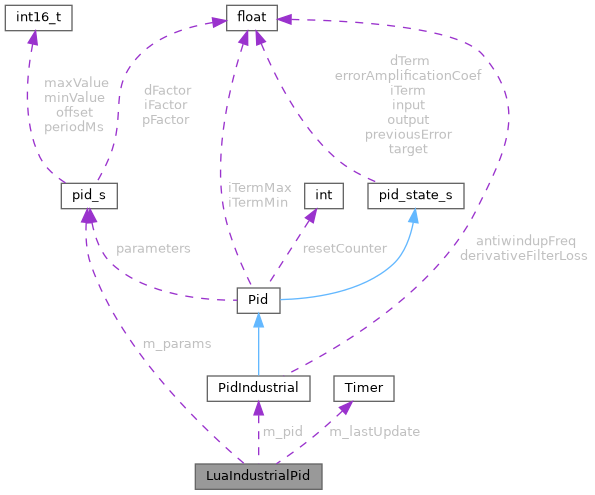
| PidIndustrial | m_pid |
| Timer | m_lastUpdate |
| pid_s | m_params |
Detailed Description
Constructor & Destructor Documentation
◆ LuaIndustrialPid() [1/2]
|
default |
◆ LuaIndustrialPid() [2/2]
Member Function Documentation
◆ get()
Definition at line 76 of file lua_pid.h.
Referenced by configureRusefiLuaHooks().

◆ reset()
|
inline |
Definition at line 102 of file lua_pid.h.
Referenced by configureRusefiLuaHooks(), setAntiwindupFreq(), setDerivativeFilterLoss(), and setOffset().


◆ setAntiwindupFreq()
|
inline |
Definition at line 97 of file lua_pid.h.
Referenced by configureRusefiLuaHooks().


◆ setDerivativeFilterLoss()
|
inline |
Definition at line 92 of file lua_pid.h.
Referenced by configureRusefiLuaHooks().


◆ setOffset()
|
inline |
Definition at line 87 of file lua_pid.h.
Referenced by configureRusefiLuaHooks().


Field Documentation
◆ m_lastUpdate
|
private |
Definition at line 108 of file lua_pid.h.
Referenced by get(), and LuaIndustrialPid().
◆ m_params
|
private |
Definition at line 109 of file lua_pid.h.
Referenced by LuaIndustrialPid(), and setOffset().
◆ m_pid
|
private |
Definition at line 107 of file lua_pid.h.
Referenced by get(), reset(), setAntiwindupFreq(), and setDerivativeFilterLoss().
The documentation for this struct was generated from the following file:
- controllers/lua/lua_pid.h