#include <efi_pid.h>
Public Member Functions | |
| Pid () | |
| Pid (pid_s *parameters) | |
| void | initPidClass (pid_s *parameters) |
| bool | isSame (const pid_s *parameters) const |
| float | getOutput (float target, float input) |
| virtual float | getOutput (float target, float input, float dTime) |
| float | getUnclampedOutput (float target, float input, float dTime) |
| void | updateFactors (float pFactor, float iFactor, float dFactor) |
| virtual void | reset () |
| float | getP () const |
| float | getI () const |
| float | getD () const |
| float | getOffset () const |
| float | getMinValue () const |
| float | getIntegration (void) const |
| float | getPrevError (void) const |
| void | setErrorAmplification (float coef) |
| void | postState (pid_status_s &pidStatus) const |
| void | showPidStatus (const char *msg) const |
| void | sleep () |
Data Fields | |
| int | resetCounter |
| float | iTermMin = -1000000.0 |
| float | iTermMax = 1000000.0 |
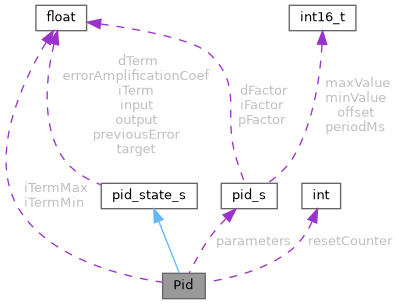
 Data Fields inherited from pid_state_s Data Fields inherited from pid_state_s | |
| float | iTerm = (float)0 |
| float | dTerm = (float)0 |
| float | target = (float)0 |
| float | input = (float)0 |
| float | output = (float)0 |
| float | errorAmplificationCoef = (float)0 |
| float | previousError = (float)0 |
Protected Member Functions | |
| virtual void | updateITerm (float value) |
Protected Attributes | |
| pid_s * | parameters = nullptr |
Detailed Description
default basic implementation also known as PidParallelController
Constructor & Destructor Documentation
◆ Pid() [1/2]
| Pid::Pid | ( | ) |

◆ Pid() [2/2]
|
explicit |

Member Function Documentation
◆ getD()
| float Pid::getD | ( | ) | const |
Definition at line 126 of file efi_pid.cpp.
◆ getI()
| float Pid::getI | ( | ) | const |
Definition at line 114 of file efi_pid.cpp.
◆ getIntegration()
| float Pid::getIntegration | ( | void | ) | const |
Definition at line 122 of file efi_pid.cpp.
◆ getMinValue()
| float Pid::getMinValue | ( | void | ) | const |
Definition at line 134 of file efi_pid.cpp.
Referenced by getOutput(), and PidIndustrial::limitOutput().

◆ getOffset()
| float Pid::getOffset | ( | void | ) | const |
Definition at line 130 of file efi_pid.cpp.
Referenced by PidIndustrial::getOutput(), getUnclampedOutput(), and showPidStatus().

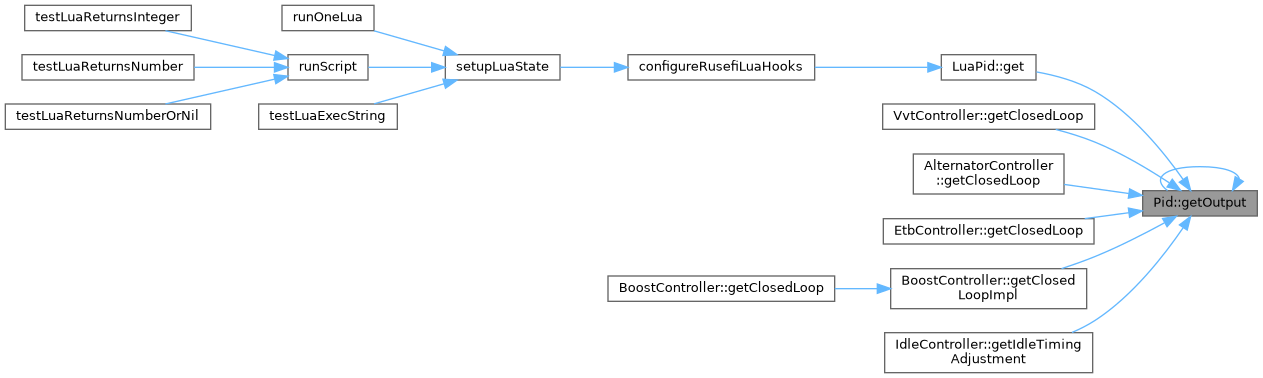
◆ getOutput() [1/2]
This version of the method takes dTime from pid_s
- Parameters
-
Controller input / process output
- Returns
- Output from the PID controller / the input to the process
- Parameters
-
Controller input / process output
- Returns
- Output from the PID controller / the input to the process
Definition at line 56 of file efi_pid.cpp.
Referenced by LuaPid::get(), VvtController::getClosedLoop(), AlternatorController::getClosedLoop(), EtbController::getClosedLoop(), BoostController::getClosedLoopImpl(), IdleController::getIdleTimingAdjustment(), and getOutput().
◆ getOutput() [2/2]
- Parameters
-
dTime seconds probably? :)
Reimplemented in PidCic, PidIndustrial, PidCic, and PidIndustrial.
Definition at line 84 of file efi_pid.cpp.

◆ getP()
| float Pid::getP | ( | ) | const |
Definition at line 110 of file efi_pid.cpp.
◆ getPrevError()
| float Pid::getPrevError | ( | void | ) | const |
Definition at line 118 of file efi_pid.cpp.
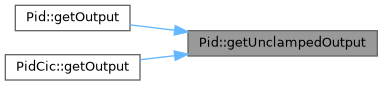
◆ getUnclampedOutput()
Definition at line 62 of file efi_pid.cpp.
Referenced by getOutput(), and PidCic::getOutput().

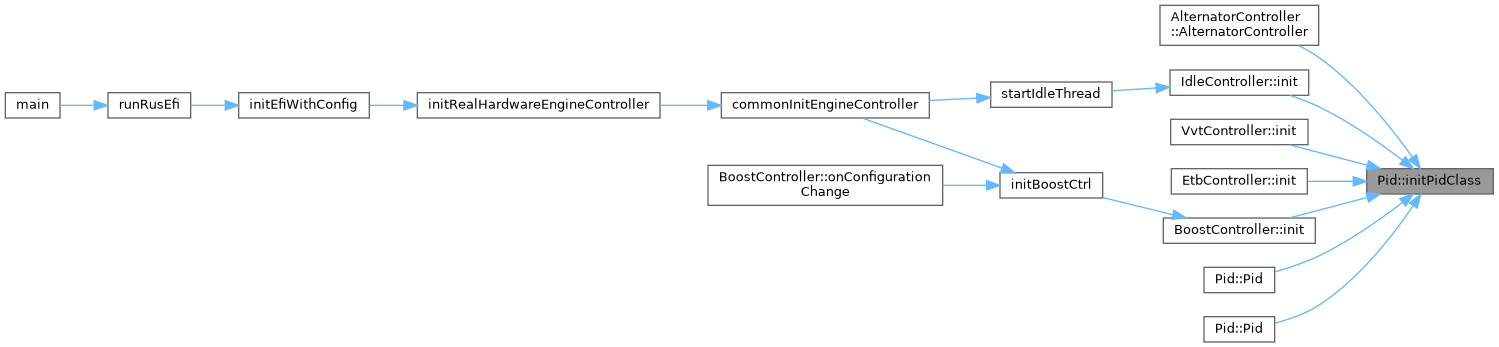
◆ initPidClass()
| void Pid::initPidClass | ( | pid_s * | parameters | ) |
Definition at line 24 of file efi_pid.cpp.
Referenced by AlternatorController::AlternatorController(), IdleController::init(), VvtController::init(), EtbController::init(), BoostController::init(), Pid(), and Pid().

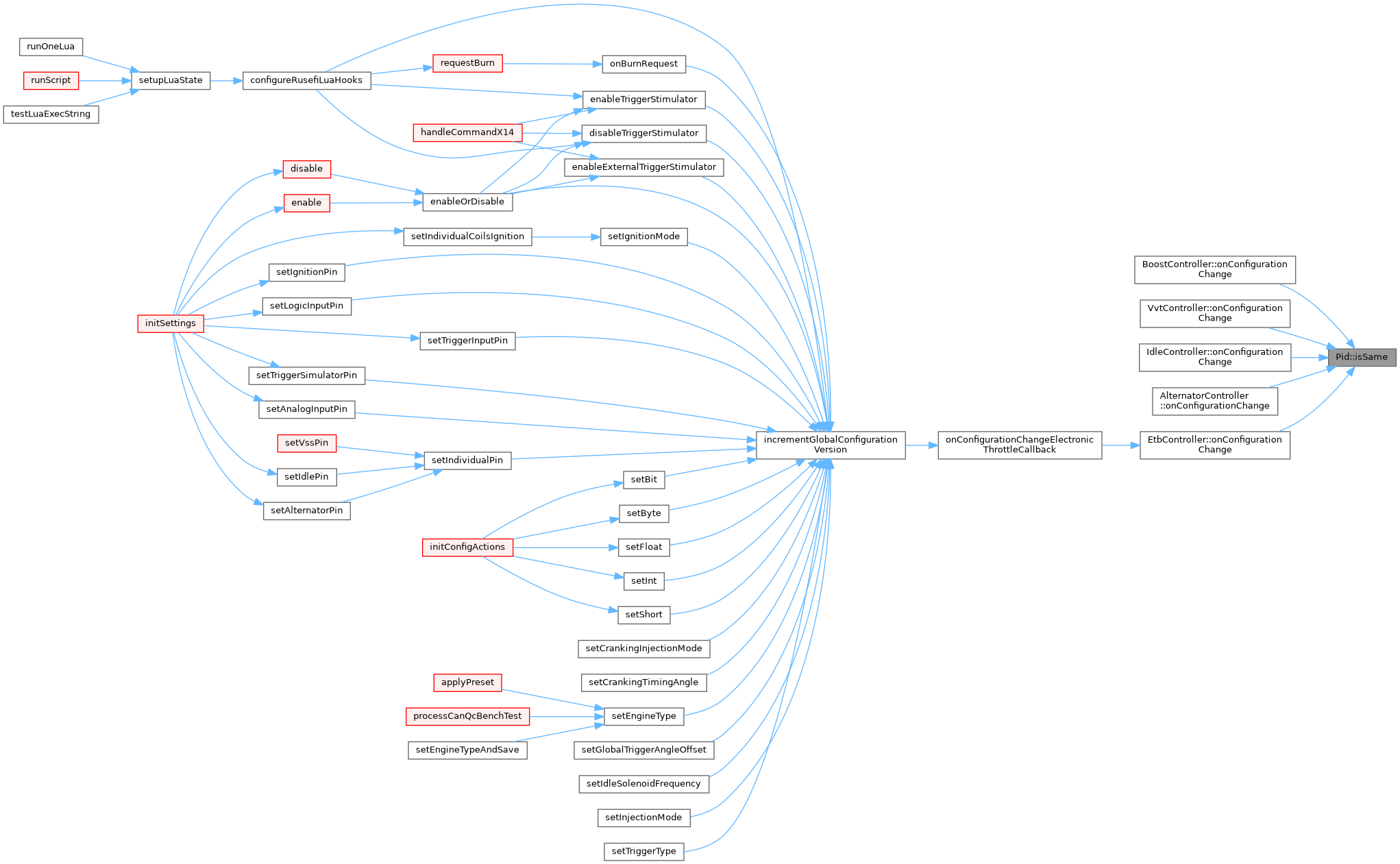
◆ isSame()
Definition at line 39 of file efi_pid.cpp.
Referenced by BoostController::onConfigurationChange(), VvtController::onConfigurationChange(), IdleController::onConfigurationChange(), AlternatorController::onConfigurationChange(), and EtbController::onConfigurationChange().

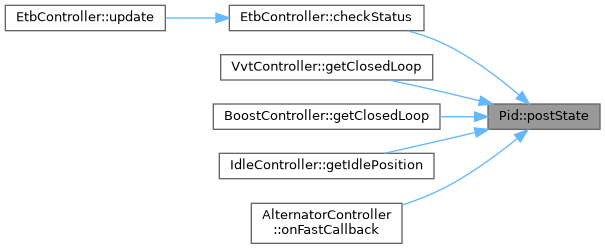
◆ postState()
| void Pid::postState | ( | pid_status_s & | pidStatus | ) | const |
Definition at line 144 of file efi_pid.cpp.
Referenced by EtbController::checkStatus(), VvtController::getClosedLoop(), BoostController::getClosedLoop(), IdleController::getIdlePosition(), and AlternatorController::onFastCallback().
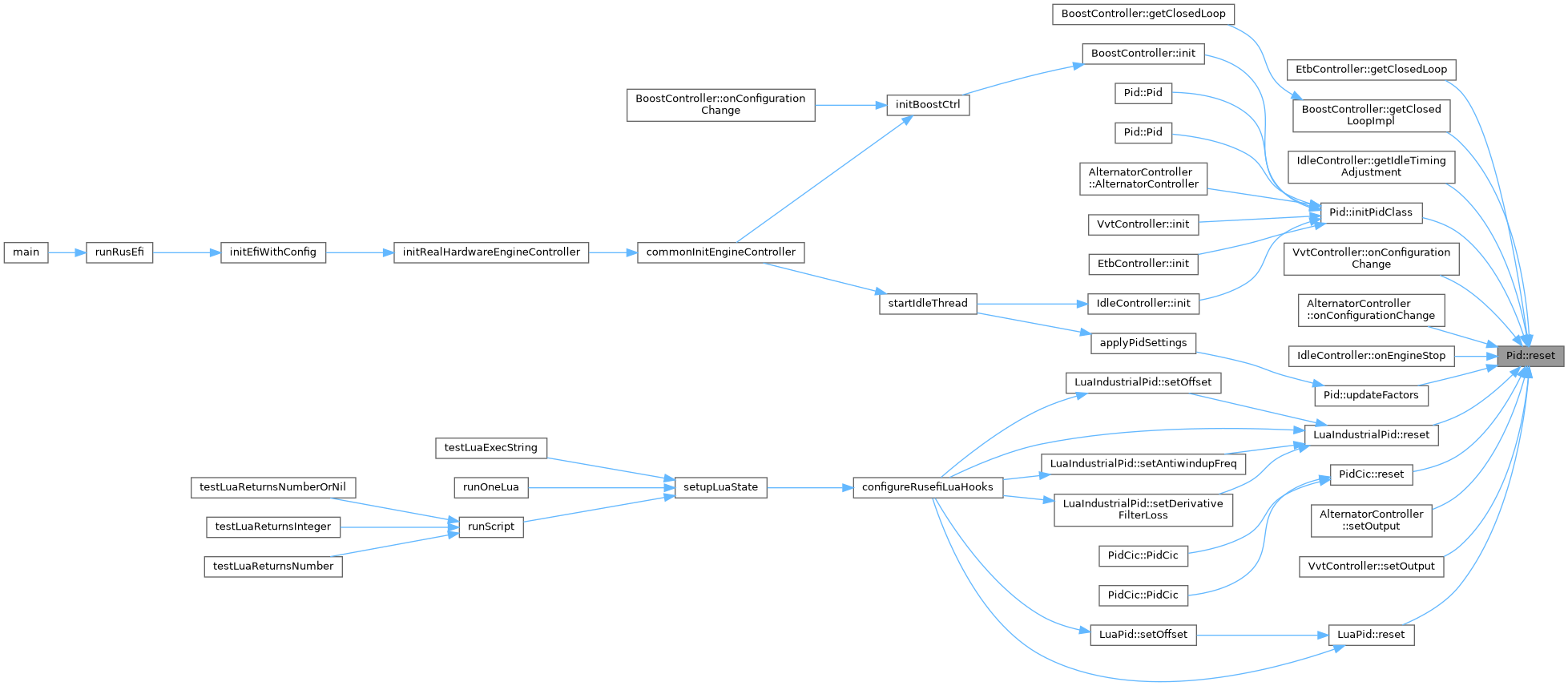
◆ reset()
|
virtual |
Reimplemented in PidCic.
Definition at line 103 of file efi_pid.cpp.
Referenced by EtbController::getClosedLoop(), BoostController::getClosedLoopImpl(), IdleController::getIdleTimingAdjustment(), initPidClass(), VvtController::onConfigurationChange(), AlternatorController::onConfigurationChange(), IdleController::onEngineStop(), LuaPid::reset(), LuaIndustrialPid::reset(), PidCic::reset(), AlternatorController::setOutput(), VvtController::setOutput(), and updateFactors().
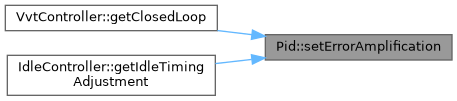
◆ setErrorAmplification()
| void Pid::setErrorAmplification | ( | float | coef | ) |
Definition at line 138 of file efi_pid.cpp.
Referenced by VvtController::getClosedLoop(), and IdleController::getIdleTimingAdjustment().
◆ showPidStatus()
| void Pid::showPidStatus | ( | const char * | msg | ) | const |
Definition at line 161 of file efi_pid.cpp.
Referenced by EtbController::showStatus().


◆ sleep()
| void Pid::sleep | ( | ) |
Definition at line 154 of file efi_pid.cpp.
◆ updateFactors()
Definition at line 96 of file efi_pid.cpp.
Referenced by applyPidSettings().


◆ updateITerm()
|
protectedvirtual |
If we have exceeded the ability of the controlled device to hit target, the I factor will keep accumulating and approach infinity. Here we limit the I-term #353
Reimplemented in PidCic.
Definition at line 179 of file efi_pid.cpp.
Referenced by PidIndustrial::getOutput(), and getUnclampedOutput().

Field Documentation
◆ iTermMax
| float Pid::iTermMax = 1000000.0 |
Definition at line 69 of file efi_pid.h.
Referenced by AlternatorController::getClosedLoop(), IdleController::getIdlePosition(), EtbController::init(), BoostController::onFastCallback(), and updateITerm().
◆ iTermMin
| float Pid::iTermMin = -1000000.0 |
Definition at line 68 of file efi_pid.h.
Referenced by AlternatorController::getClosedLoop(), IdleController::getIdlePosition(), EtbController::init(), BoostController::onFastCallback(), and updateITerm().
◆ parameters
|
protected |
Definition at line 71 of file efi_pid.h.
Referenced by getD(), getI(), getMinValue(), getOffset(), getOutput(), getOutput(), PidIndustrial::getOutput(), getP(), getUnclampedOutput(), initPidClass(), isSame(), PidIndustrial::limitOutput(), postState(), showPidStatus(), sleep(), updateFactors(), and updateITerm().
◆ resetCounter
| int Pid::resetCounter |
Definition at line 66 of file efi_pid.h.
Referenced by initPidClass(), postState(), and reset().
The documentation for this class was generated from the following files:
- util/math/efi_pid.h
- util/math/efi_pid.cpp