Functions | |
| void | initializeVvtN63TU (TriggerWaveform *s) |
Function Documentation
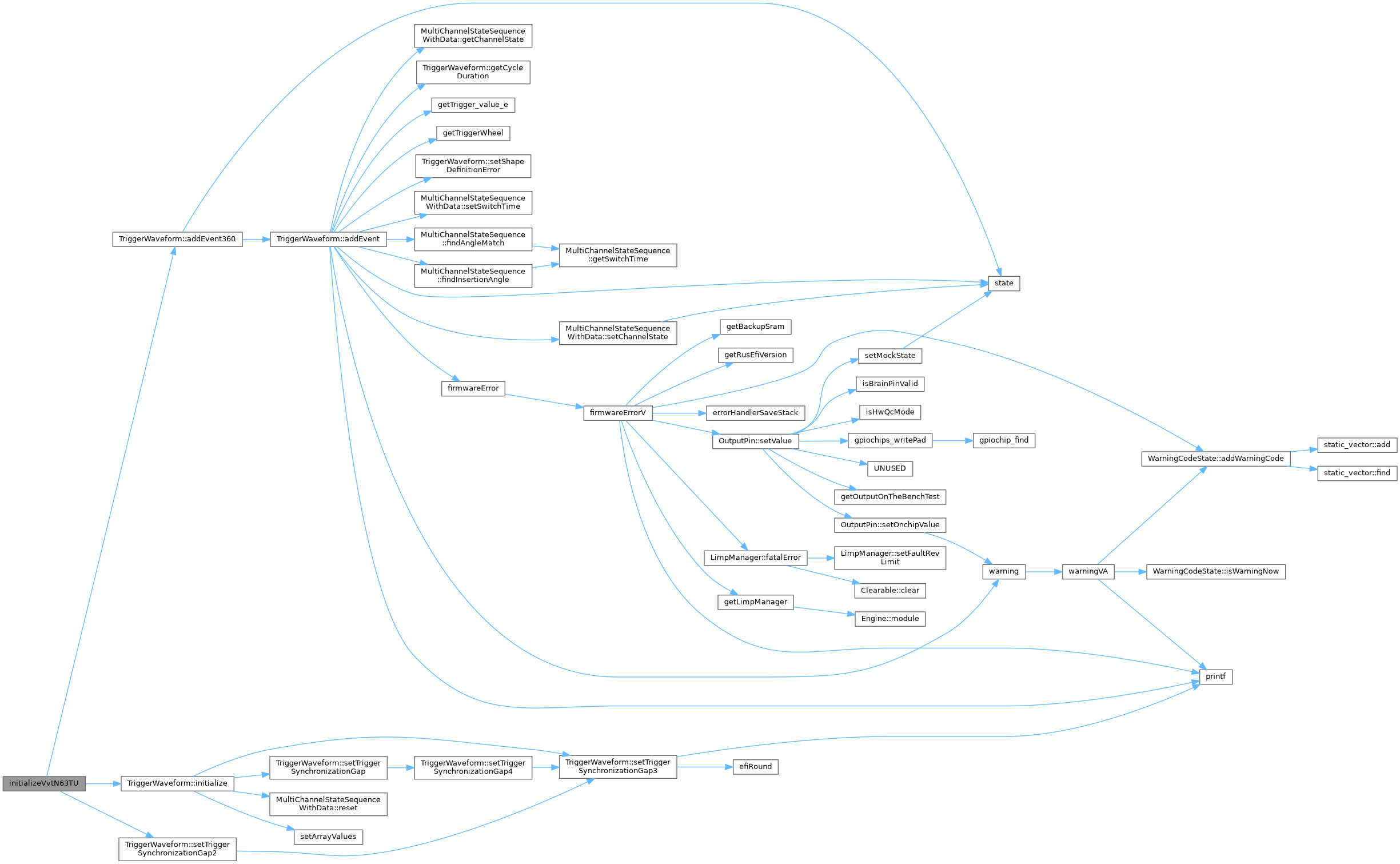
◆ initializeVvtN63TU()
| void initializeVvtN63TU | ( | TriggerWaveform * | s | ) |
Definition at line 7 of file trigger_bmw.cpp.
7 {
9
11
12 s->setTriggerSynchronizationGap2(1.4, 1.6);
13
16
19
22}
void initialize(operation_mode_e operationMode, SyncEdge syncEdge)
Definition trigger_structure.cpp:65
void addEvent360(angle_t angle, TriggerValue const state, TriggerWheel const channelIndex=TriggerWheel::T_PRIMARY)
Definition trigger_structure.cpp:250
void setTriggerSynchronizationGap2(float syncRatioFrom, float syncRatioTo)
Definition trigger_structure.cpp:367
@ T_PRIMARY
@ Fall
Here is the call graph for this function: