Detailed Description
- Date
- Mar 28, 2014
Definition in file trigger_gm.h.
Functions | |
| void | configureGm60_2_2_2 (TriggerWaveform *s) |
| void | configureGmTriggerWaveform (TriggerWaveform *s) |
| void | initGmLS24_5deg (TriggerWaveform *s) |
| void | initGmLS24_3deg (TriggerWaveform *s) |
Function Documentation
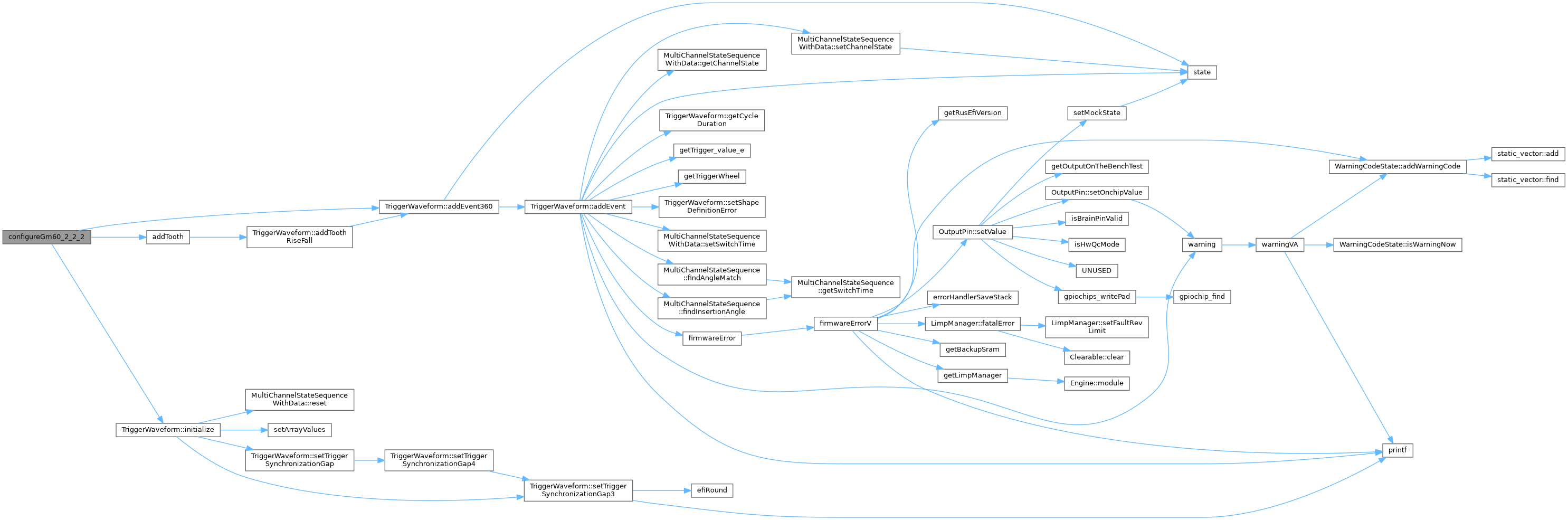
◆ configureGm60_2_2_2()
| void configureGm60_2_2_2 | ( | TriggerWaveform * | s | ) |
https://github.com/rusefi/rusefi/issues/2264 GM/Daewoo Distributor on the F8CV
Definition at line 23 of file trigger_gm.cpp.
23 {
27
29
30 for (int i=0;i<12;i++) {
32 }
33
34 offset += 2 * GM_60_W;
35
36 for (int i=0;i<18;i++) {
38 }
39
40 offset += 2 * GM_60_W;
41
42 for (int i=0;i<18;i++) {
44 }
45
46 offset += 2 * GM_60_W;
47
48 for (int i=0;i<5;i++) {
50 }
51
53
55
57
58}
bool isSynchronizationNeeded
Definition trigger_structure.h:57
void initialize(operation_mode_e operationMode, SyncEdge syncEdge)
Definition trigger_structure.cpp:65
void addEvent360(angle_t angle, TriggerValue const state, TriggerWheel const channelIndex=TriggerWheel::T_PRIMARY)
Definition trigger_structure.cpp:250
@ RISE
@ FALL
@ RiseOnly
Referenced by TriggerWaveform::initializeTriggerWaveform().
Here is the call graph for this function:
Here is the caller graph for this function:
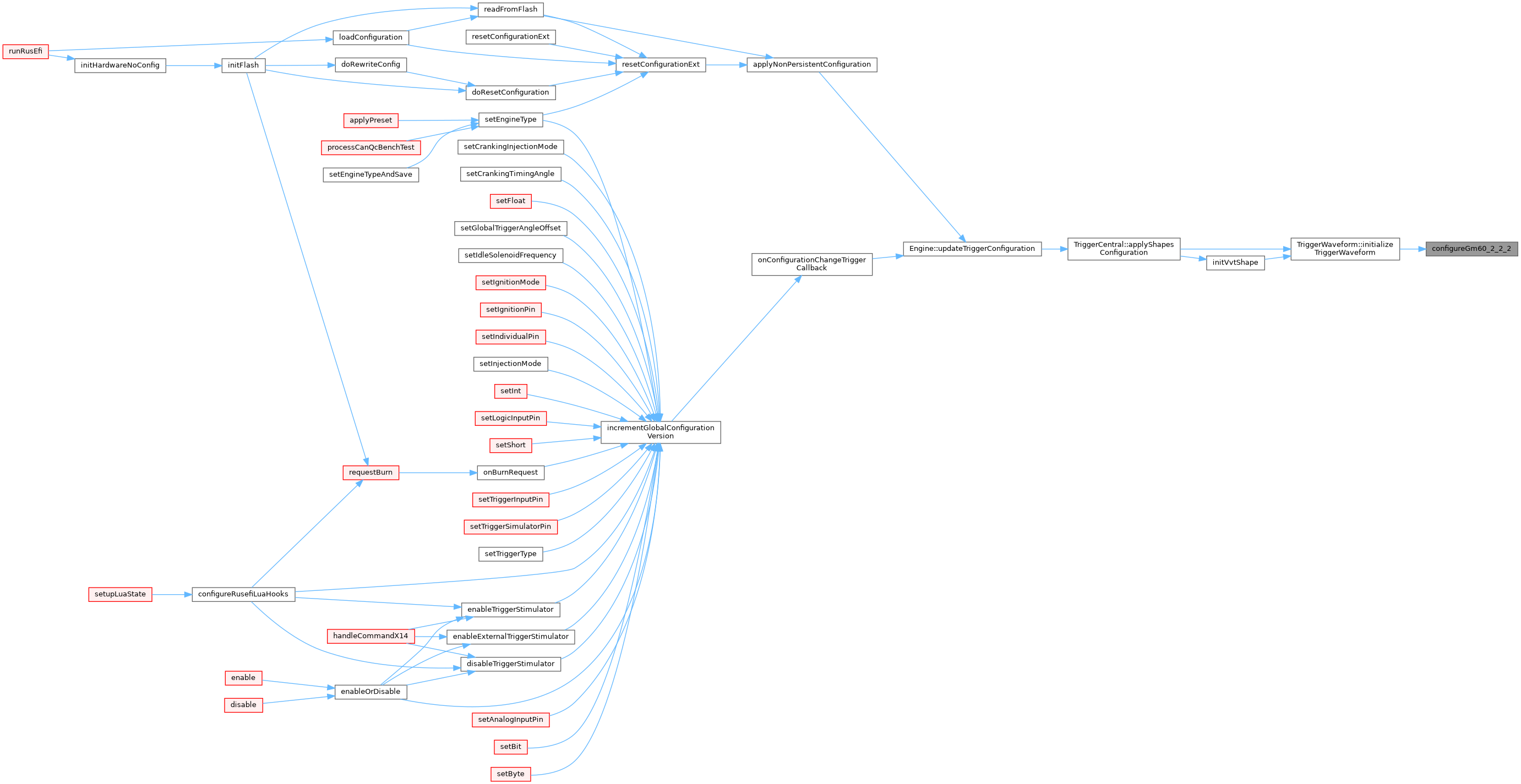
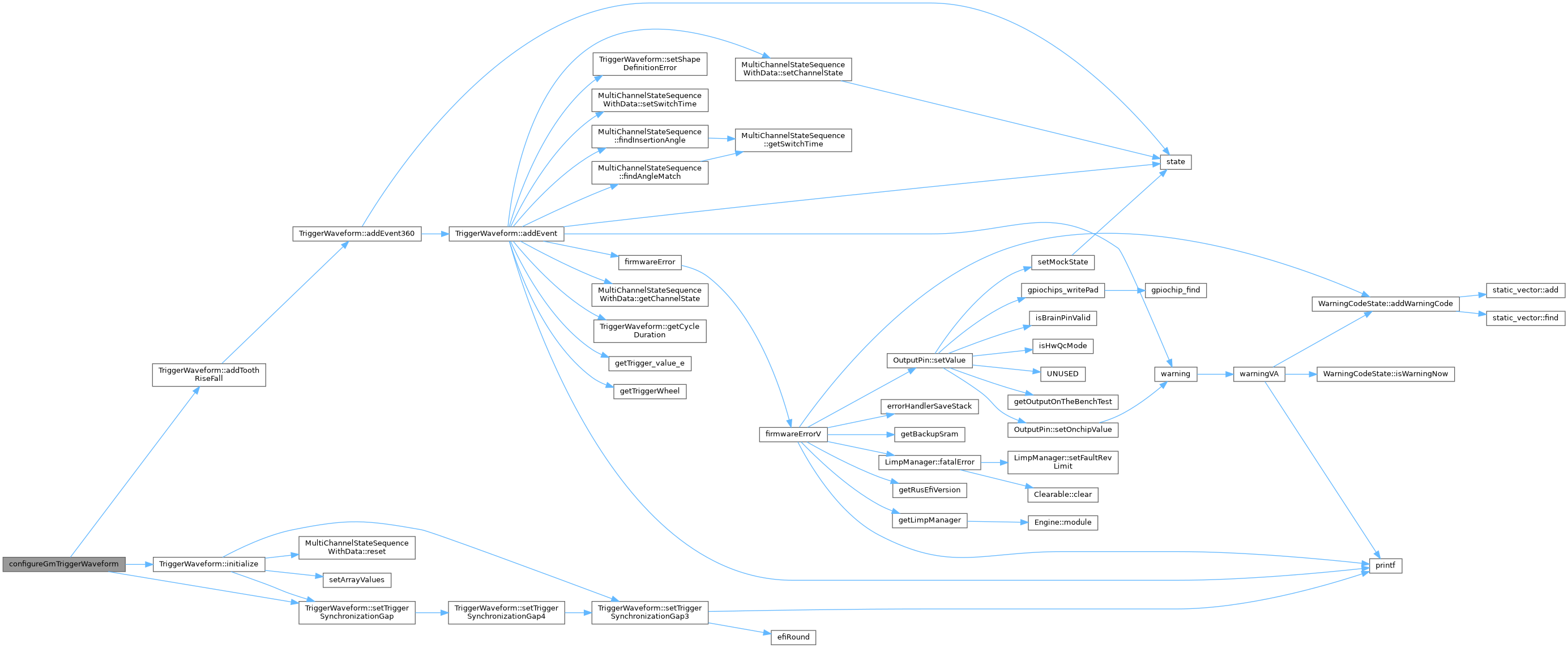
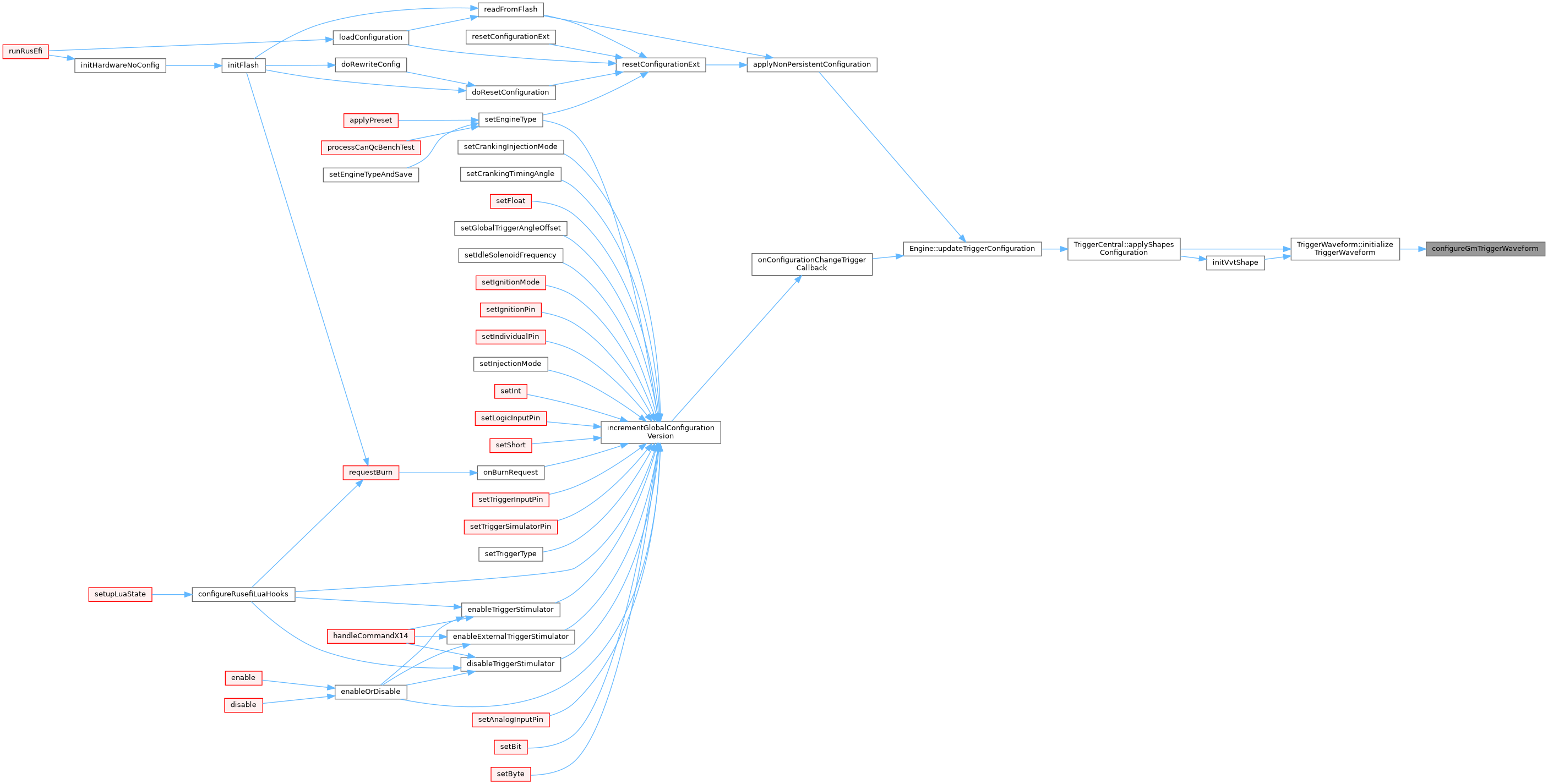
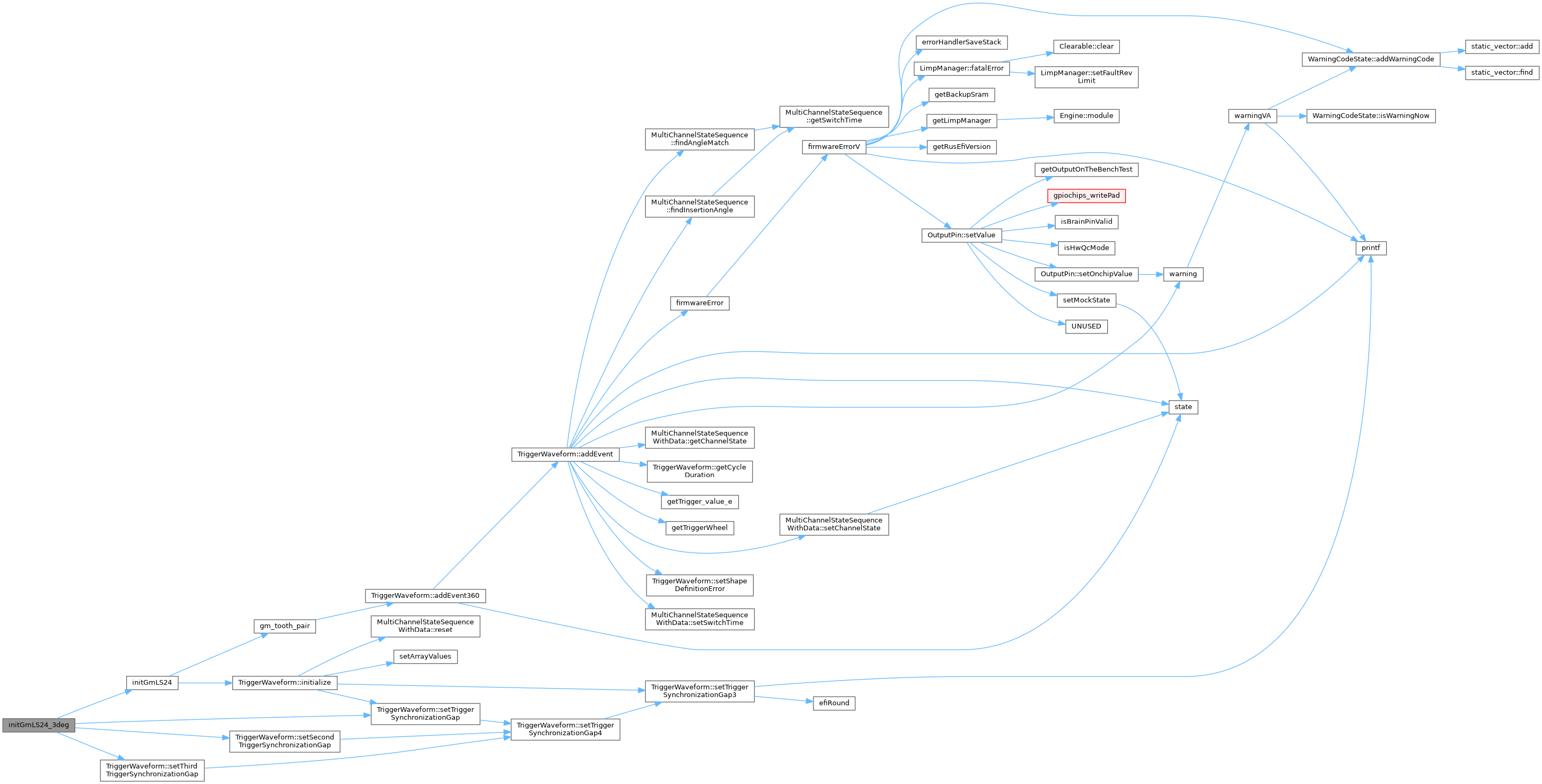
◆ configureGmTriggerWaveform()
| void configureGmTriggerWaveform | ( | TriggerWaveform * | s | ) |
Definition at line 60 of file trigger_gm.cpp.
60 {
62
63 float w = 5;
64
65 s->addToothRiseFall(60, w);
66
67 s->addToothRiseFall(120, w);
68
69 s->addToothRiseFall(180, w);
70
71 s->addToothRiseFall(240, w);
72
73 s->addToothRiseFall(300, w);
74
75 s->addToothRiseFall(350, w);
76
77 s->addToothRiseFall(360, w);
78
79 s->setTriggerSynchronizationGap(6);
80}
void setTriggerSynchronizationGap(float syncRatio)
Definition trigger_structure.cpp:423
void addToothRiseFall(angle_t angle, angle_t width=10, TriggerWheel const channelIndex=TriggerWheel::T_PRIMARY)
Definition trigger_structure.cpp:256
Referenced by TriggerWaveform::initializeTriggerWaveform().
Here is the call graph for this function:
Here is the caller graph for this function:
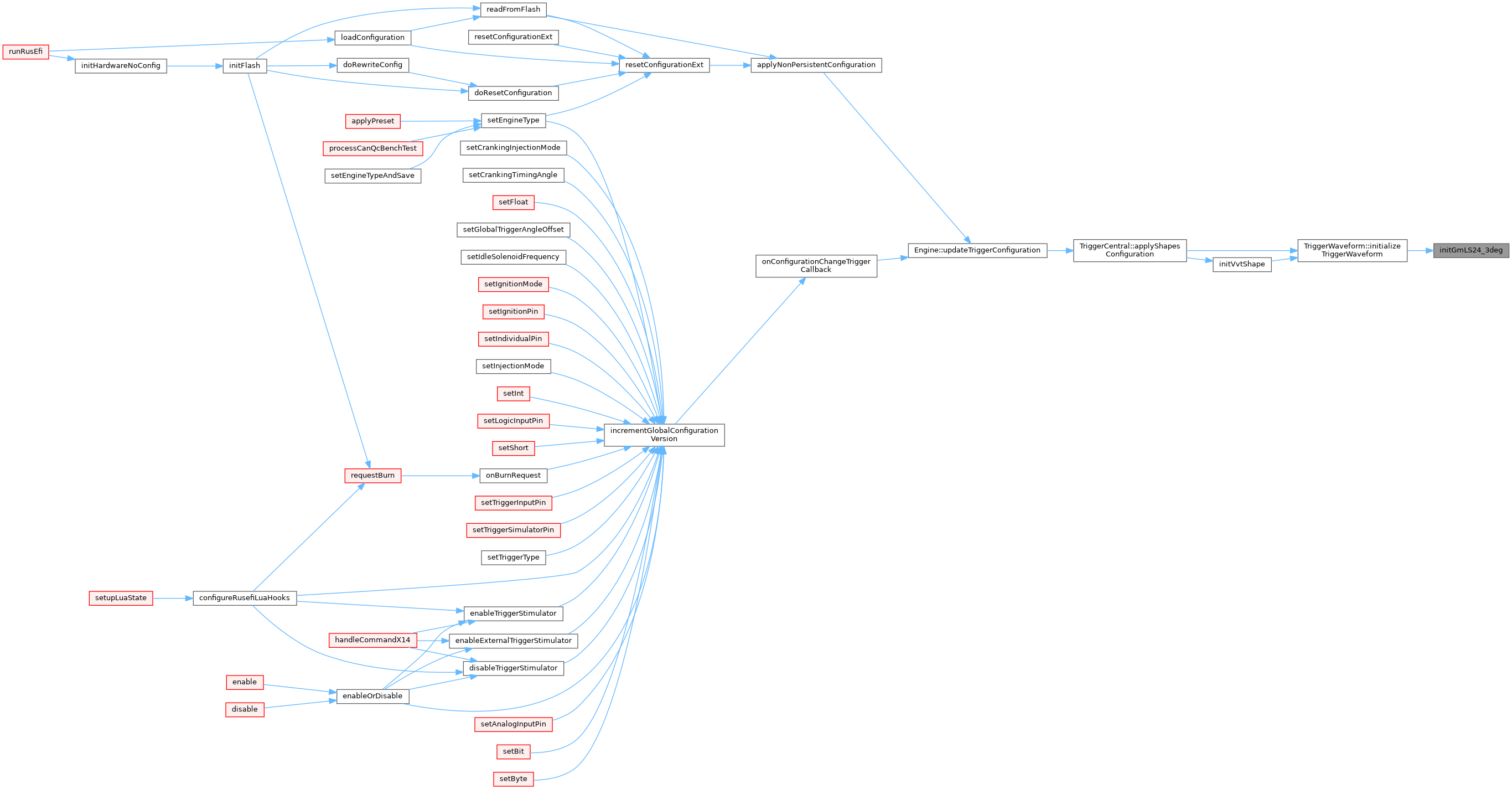
◆ initGmLS24_3deg()
| void initGmLS24_3deg | ( | TriggerWaveform * | s | ) |
Definition at line 159 of file trigger_gm.cpp.
159 {
160 initGmLS24(s, 3);
161
162 // This is tooth #20, at 312 degrees ATDC #1
163 s->setTriggerSynchronizationGap(4.0f);
164 s->setSecondTriggerSynchronizationGap(0.25f);
165 s->setThirdTriggerSynchronizationGap(4.0f);
166
167 s->tdcPosition = 48;
168}
void setSecondTriggerSynchronizationGap(float syncRatio)
Definition trigger_structure.cpp:427
void setThirdTriggerSynchronizationGap(float syncRatio)
Definition trigger_structure.cpp:435
static void initGmLS24(TriggerWaveform *s, float shortToothWidth)
Definition trigger_gm.cpp:102
Referenced by TriggerWaveform::initializeTriggerWaveform().
Here is the call graph for this function:
Here is the caller graph for this function:
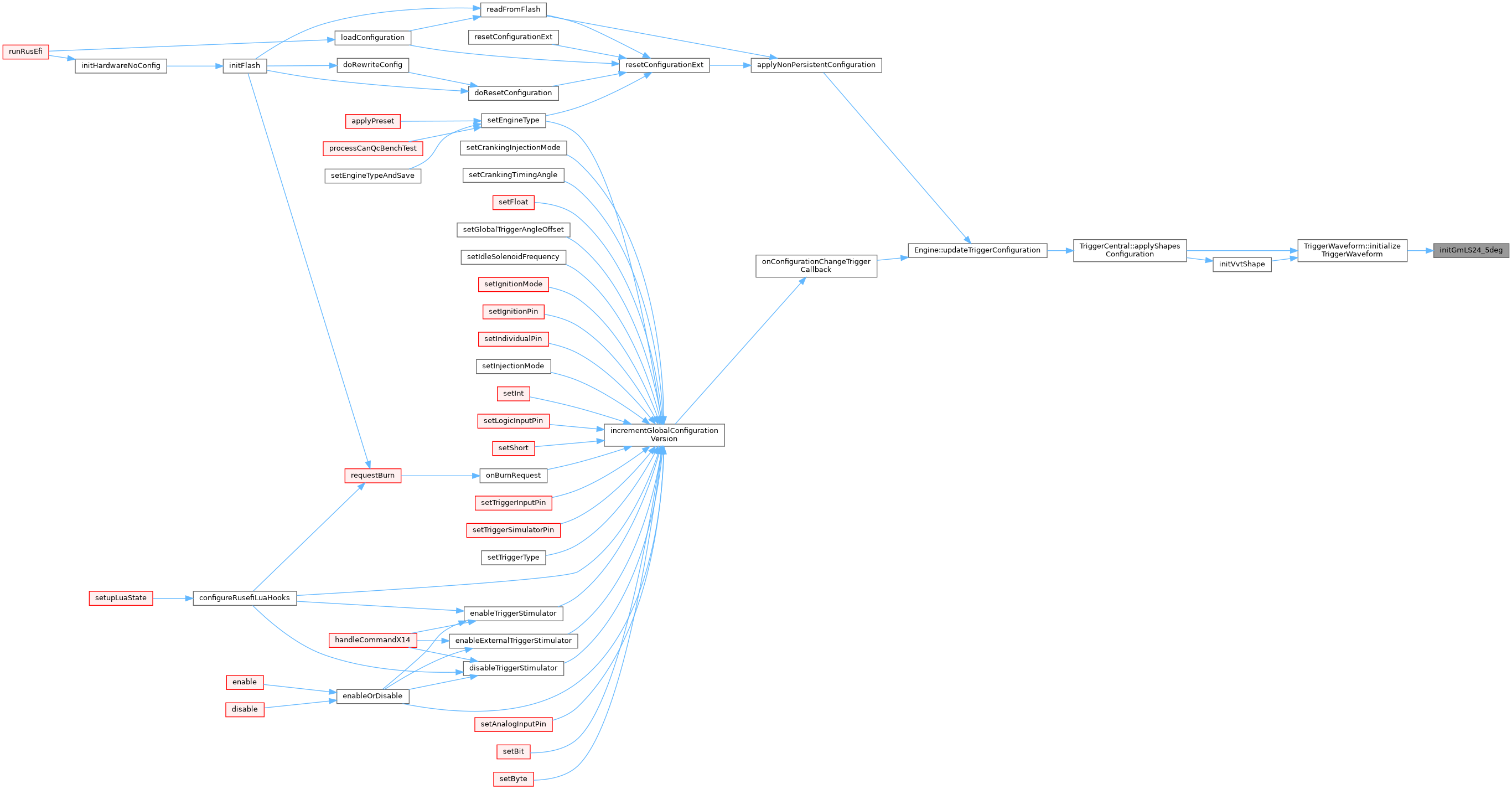
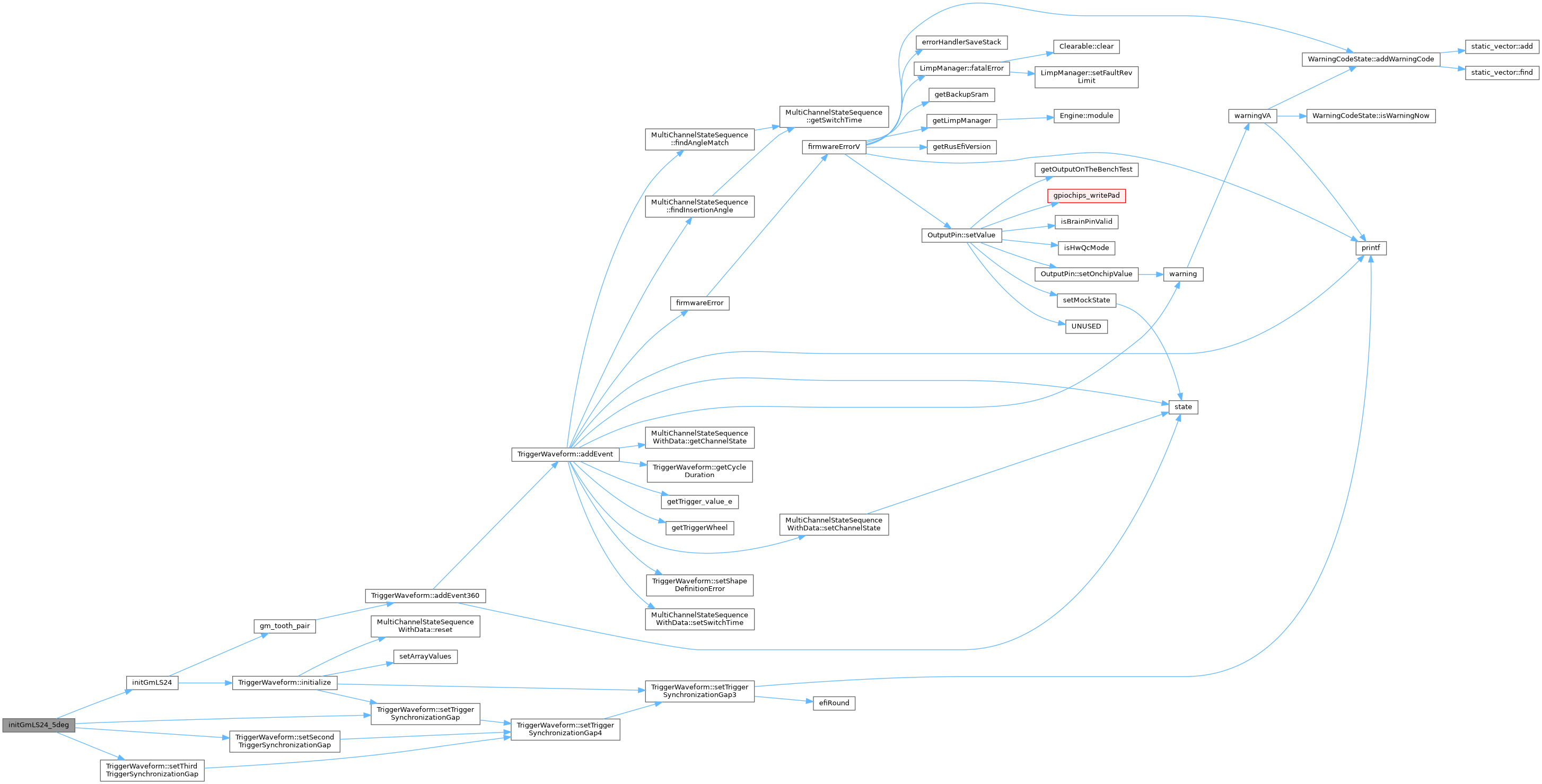
◆ initGmLS24_5deg()
| void initGmLS24_5deg | ( | TriggerWaveform * | s | ) |
Definition at line 147 of file trigger_gm.cpp.
147 {
148 initGmLS24(s, 5);
149
150 // This is tooth #20, at 310 degrees ATDC #1
151 s->setTriggerSynchronizationGap(2.0f);
152 s->setSecondTriggerSynchronizationGap(0.5f);
153 s->setThirdTriggerSynchronizationGap(2.0f);
154
155 s->tdcPosition = 50;
156}
Referenced by TriggerWaveform::initializeTriggerWaveform().
Here is the call graph for this function:
Here is the caller graph for this function: