Functions | |
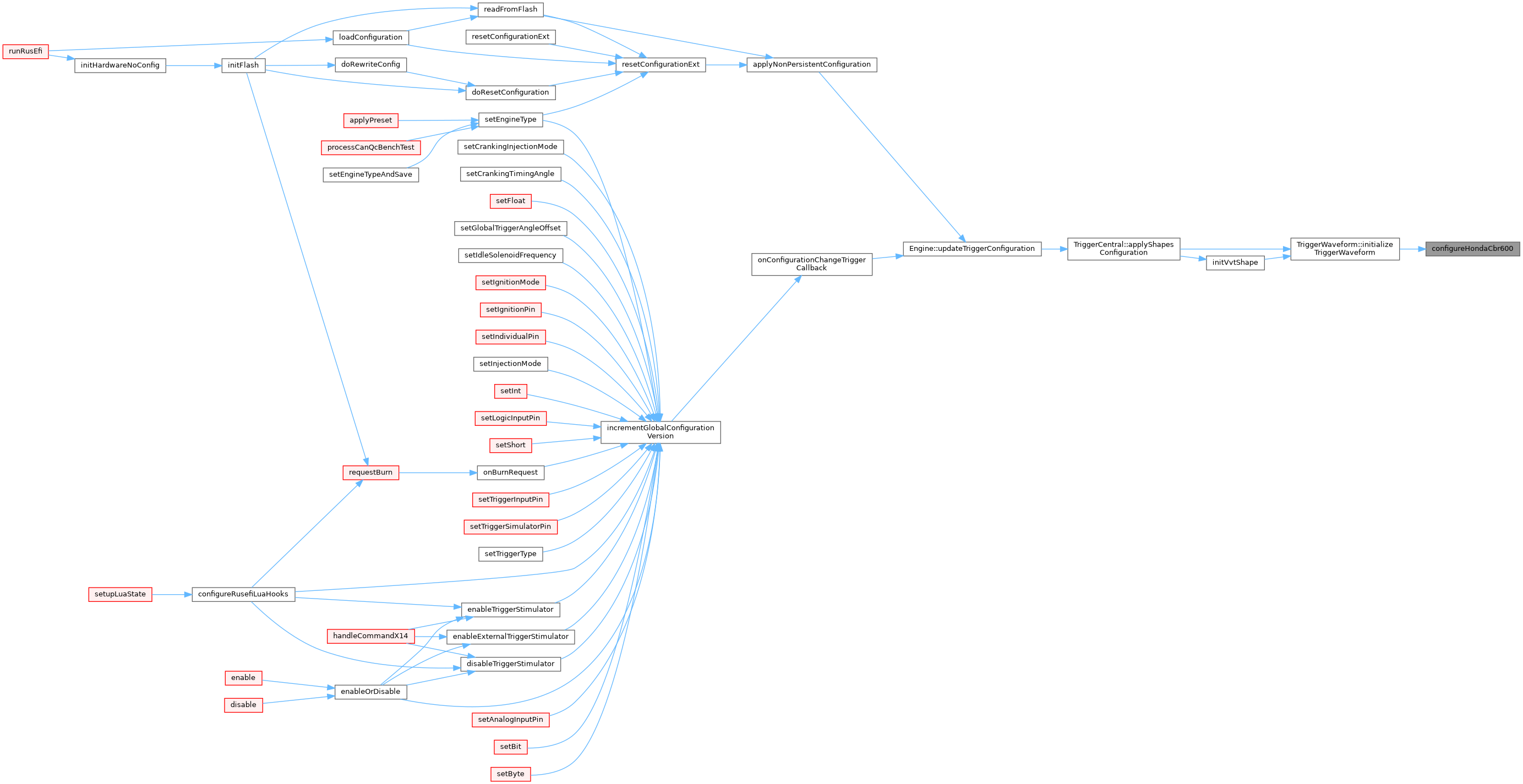
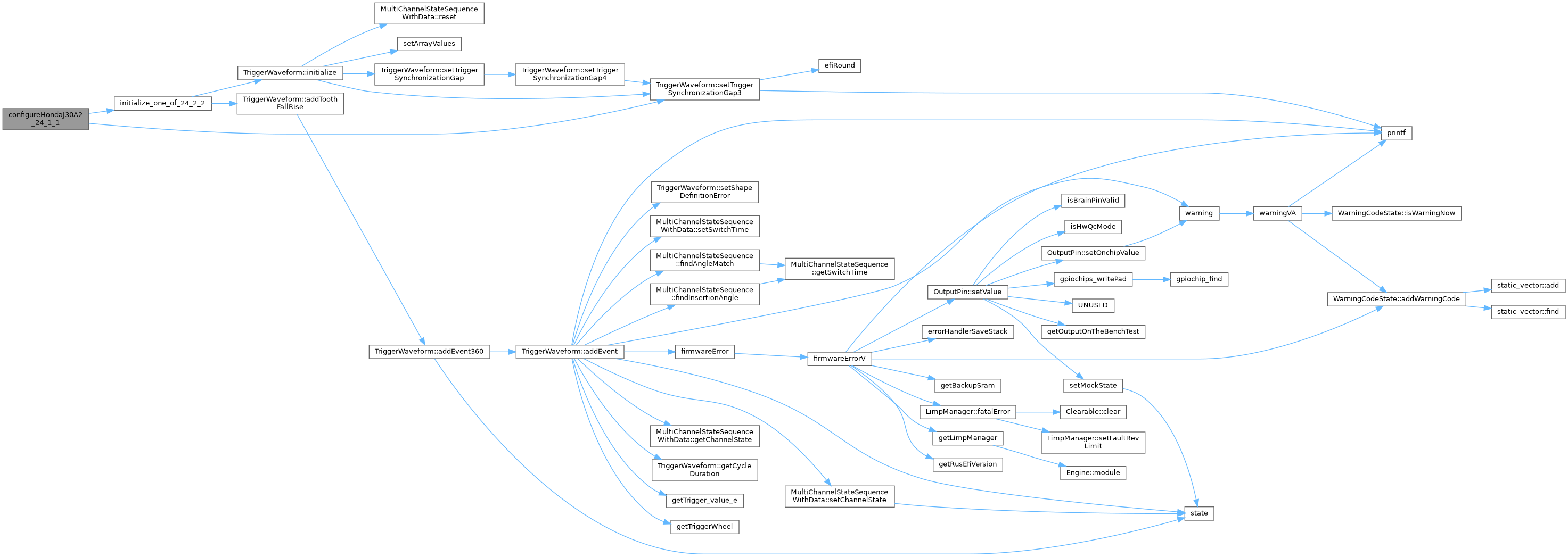
| void | configureHondaCbr600 (TriggerWaveform *s) |
| void | configureHondaK_12_1 (TriggerWaveform *s) |
| void | configureHondaK_4_1 (TriggerWaveform *s) |
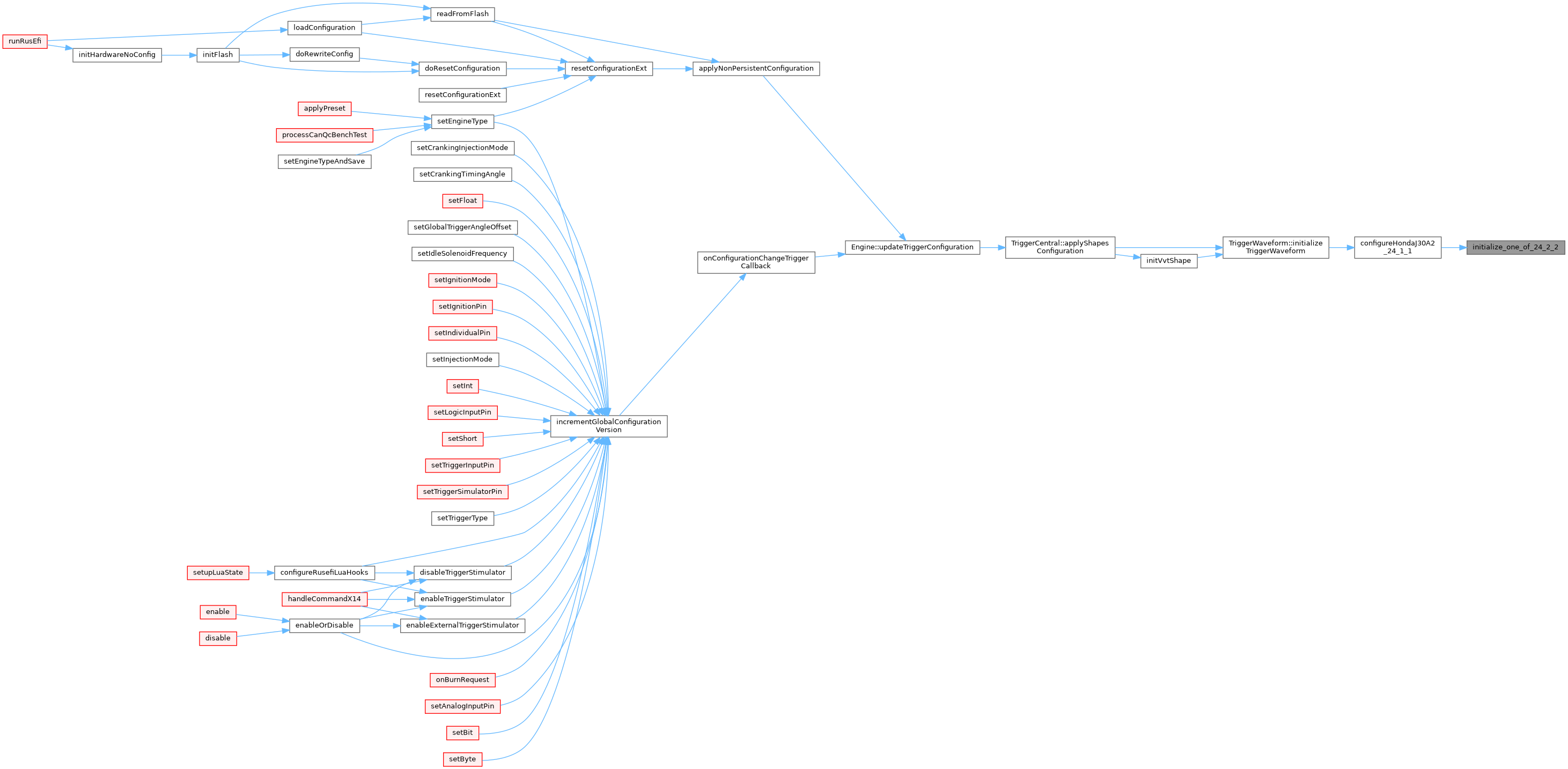
| void | initialize_one_of_24_2_2 (TriggerWaveform *s, int firstCount, int secondCount) |
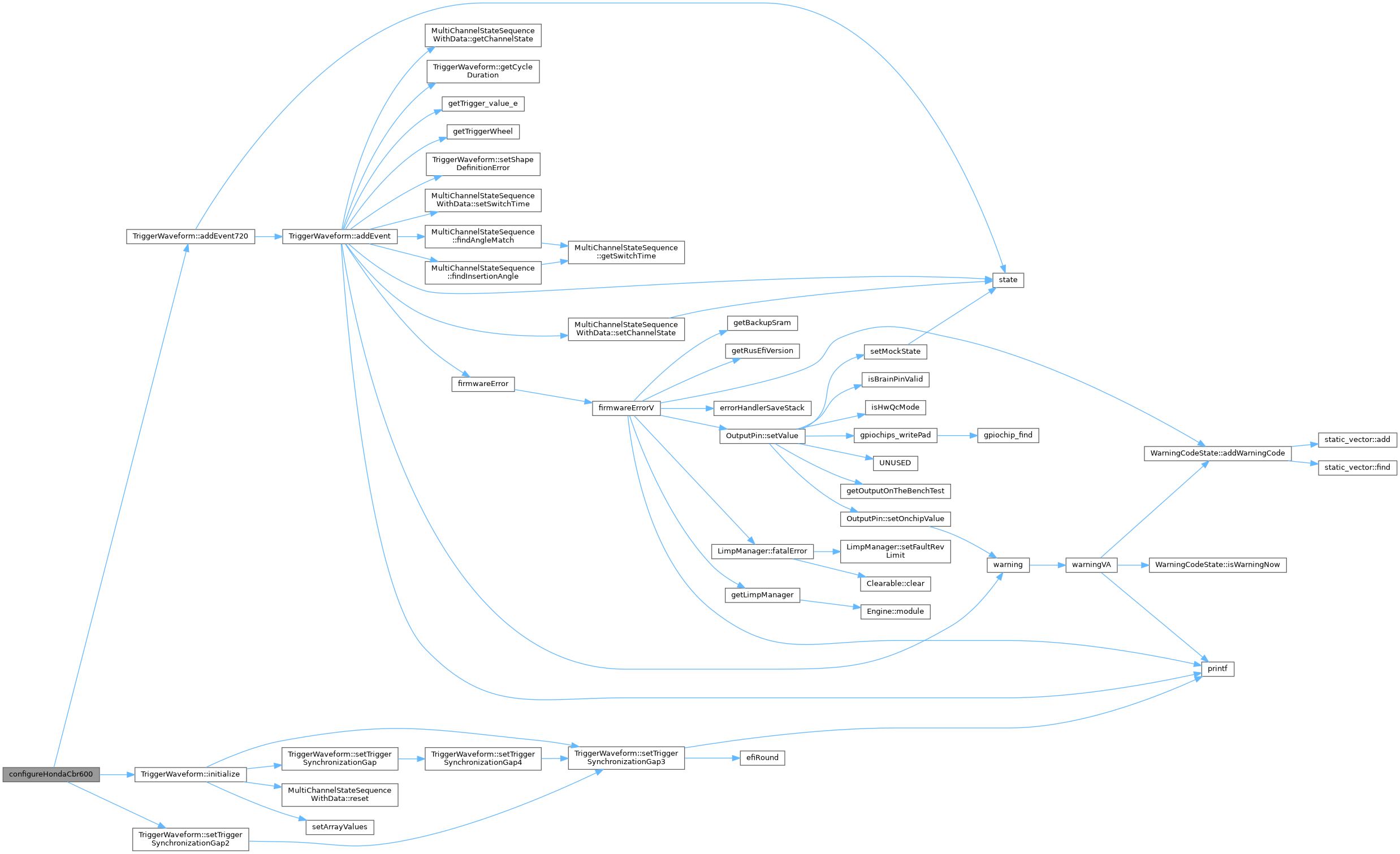
| void | configureHondaJ30A2_24_1_1 (TriggerWaveform *s) |
Function Documentation
◆ configureHondaCbr600()
| void configureHondaCbr600 | ( | TriggerWaveform * | s | ) |
Definition at line 13 of file trigger_honda.cpp.
13 {
15
18
21
24
27}
void initialize(operation_mode_e operationMode, SyncEdge syncEdge)
Definition trigger_structure.cpp:65
void addEvent720(angle_t angle, TriggerValue const state, TriggerWheel const channelIndex=TriggerWheel::T_PRIMARY)
Definition trigger_structure.cpp:246
void setTriggerSynchronizationGap2(float syncRatioFrom, float syncRatioTo)
Definition trigger_structure.cpp:367
@ RISE
@ FALL
@ RiseOnly
Referenced by TriggerWaveform::initializeTriggerWaveform().
Here is the call graph for this function:
Here is the caller graph for this function:
◆ configureHondaJ30A2_24_1_1()
| void configureHondaJ30A2_24_1_1 | ( | TriggerWaveform * | s | ) |
Definition at line 96 of file trigger_honda.cpp.
96 {
97 initialize_one_of_24_2_2(s, 6, 14);
98
100
101 s->tdcPosition = 0;
102
106 }
108 }
void setTriggerSynchronizationGap3(int index, float syncRatioFrom, float syncRatioTo)
Definition trigger_structure.cpp:371
void initialize_one_of_24_2_2(TriggerWaveform *s, int firstCount, int secondCount)
Definition trigger_honda.cpp:72
Referenced by TriggerWaveform::initializeTriggerWaveform().
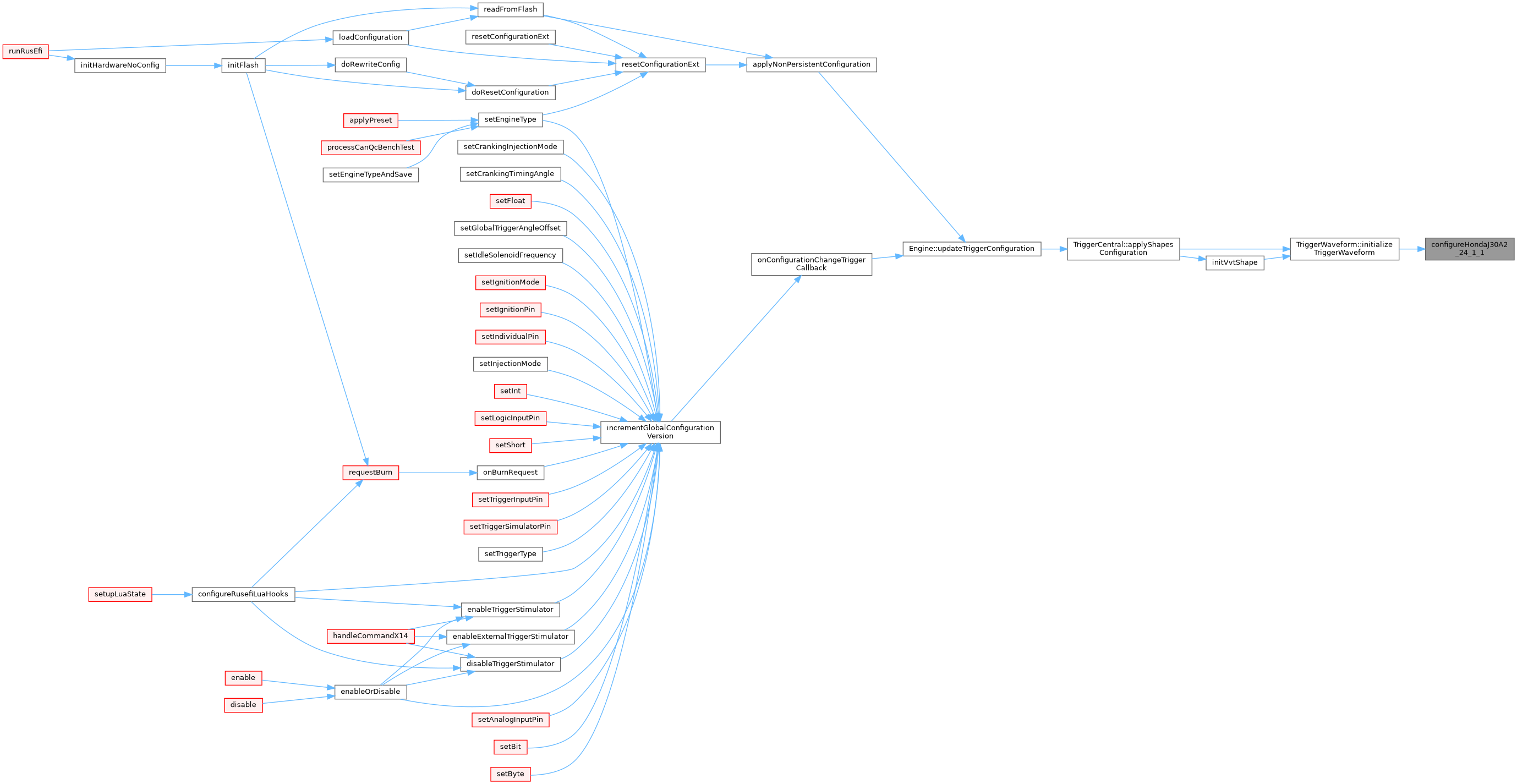
Here is the call graph for this function:
Here is the caller graph for this function:
◆ configureHondaK_12_1()
| void configureHondaK_12_1 | ( | TriggerWaveform * | s | ) |
Definition at line 30 of file trigger_honda.cpp.
30 {
32
33 // nominal gap 0.33
34 s->setSecondTriggerSynchronizationGap2(0.2f, 0.7f);
35 // nominal gap 2.0
36 s->setTriggerSynchronizationGap2(1.1f, 2.4f);
37
40
41 // for VR we only handle rises so width does not matter much
42 int width = 4;
43
44 // Extra "+1" tooth happens 1/3 of the way between first two teeth
45 s->addToothRiseFall(tooth / 3, width);
46
48 s->addToothRiseFall(tooth * i, width);
49 }
50}
void addToothRiseFall(angle_t angle, angle_t width=10, TriggerWheel const channelIndex=TriggerWheel::T_PRIMARY)
Definition trigger_structure.cpp:256
void setSecondTriggerSynchronizationGap2(float syncRatioFrom, float syncRatioTo)
Definition trigger_structure.cpp:431
Referenced by TriggerWaveform::initializeTriggerWaveform().
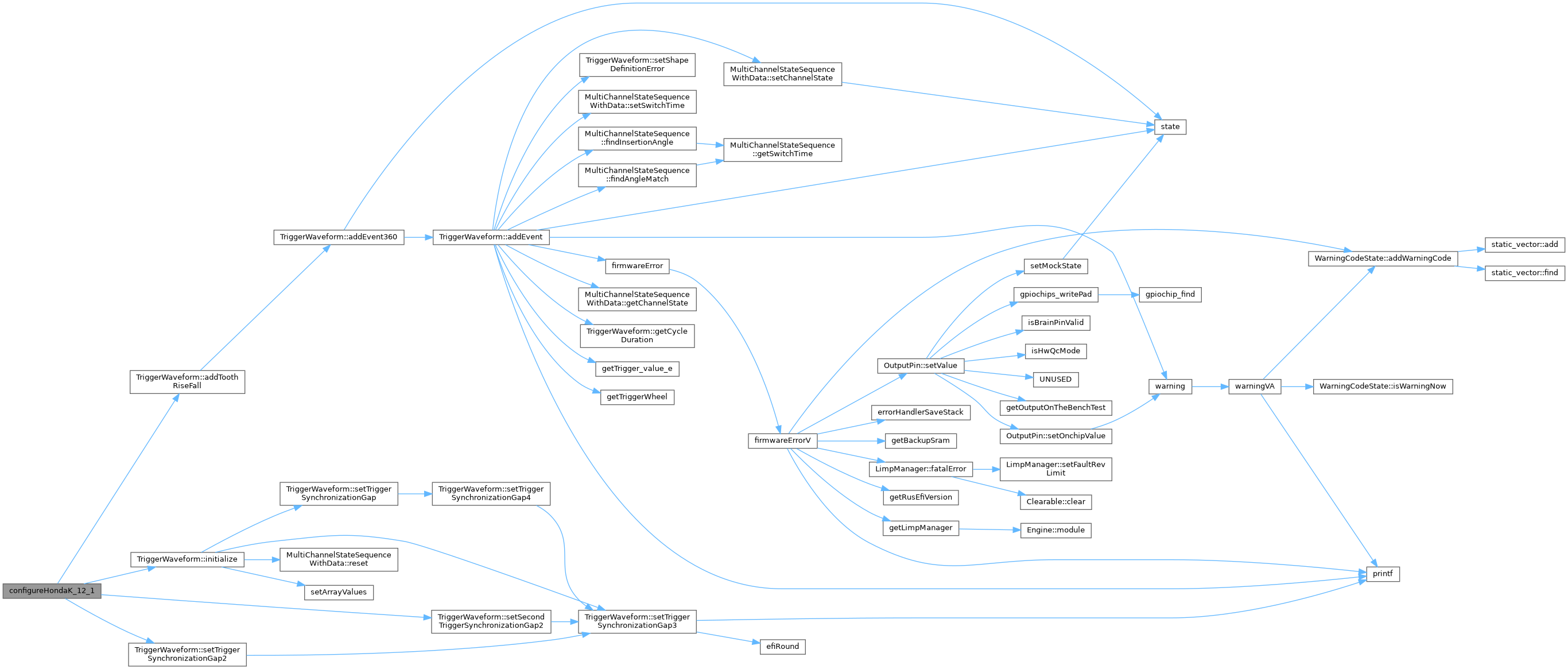
Here is the call graph for this function:
Here is the caller graph for this function:
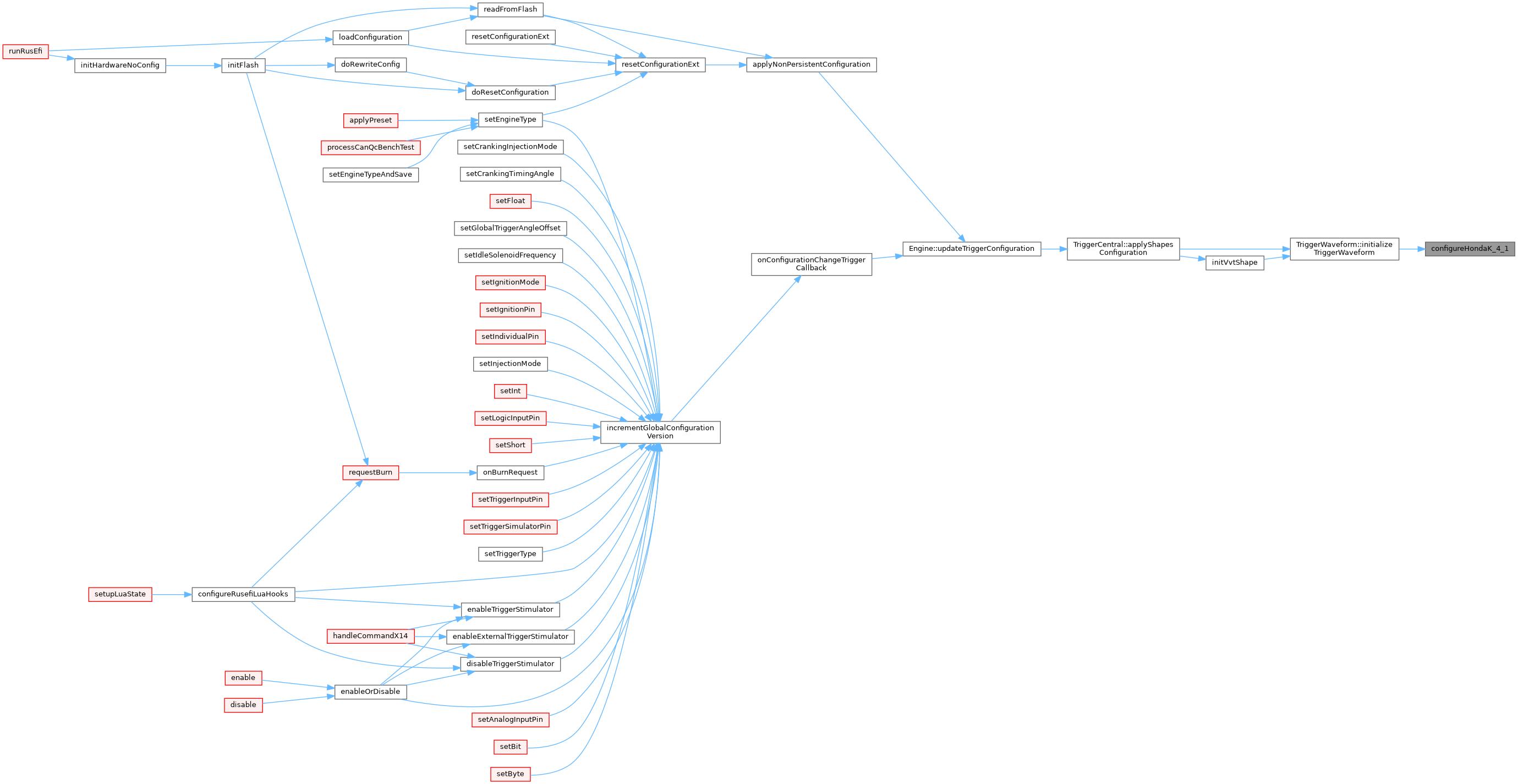
◆ configureHondaK_4_1()
| void configureHondaK_4_1 | ( | TriggerWaveform * | s | ) |
Exhaust cam shaft, not variable on Honda K 2003 Honda Element
Definition at line 56 of file trigger_honda.cpp.
56 {
58
61
62 angle_t end = 70.5;
63 int w = 15;
64 s->addToothRiseFall(end + 90 * 0, w);
65 s->addToothRiseFall(end + 90 * 1, w);
66 s->addToothRiseFall(end + 90 * 2, w);
67 s->addToothRiseFall(end + 90 * 3, w);
68
69 s->addToothRiseFall(360, 7);
70}
Referenced by TriggerWaveform::initializeTriggerWaveform().
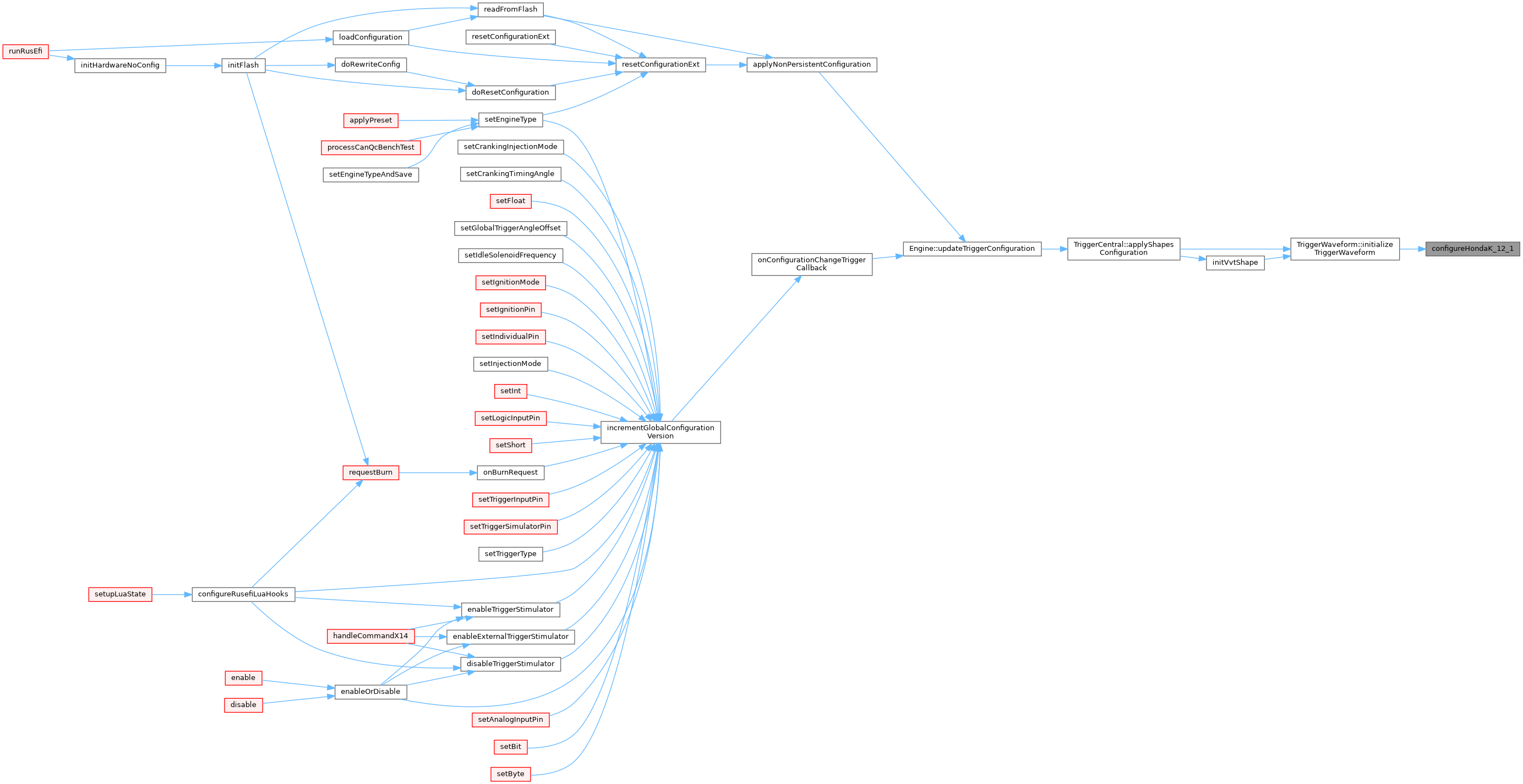
Here is the call graph for this function:
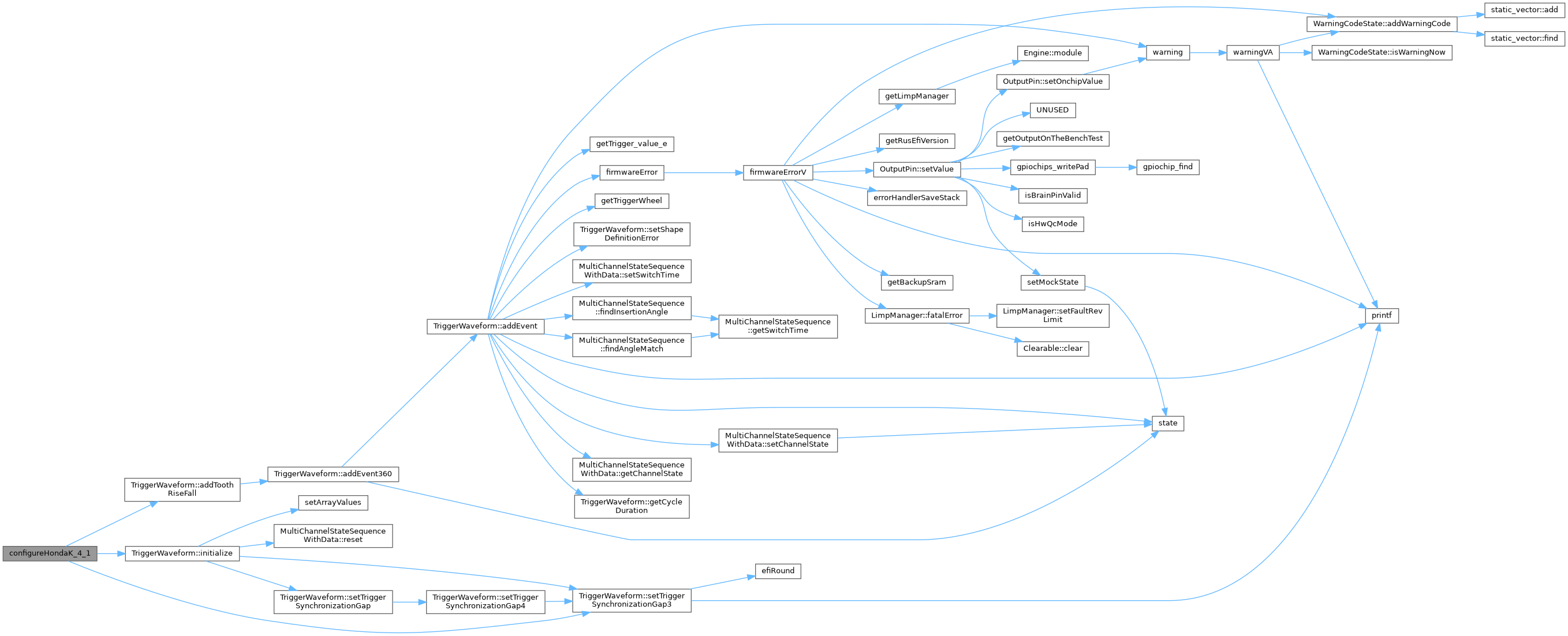
Here is the caller graph for this function:
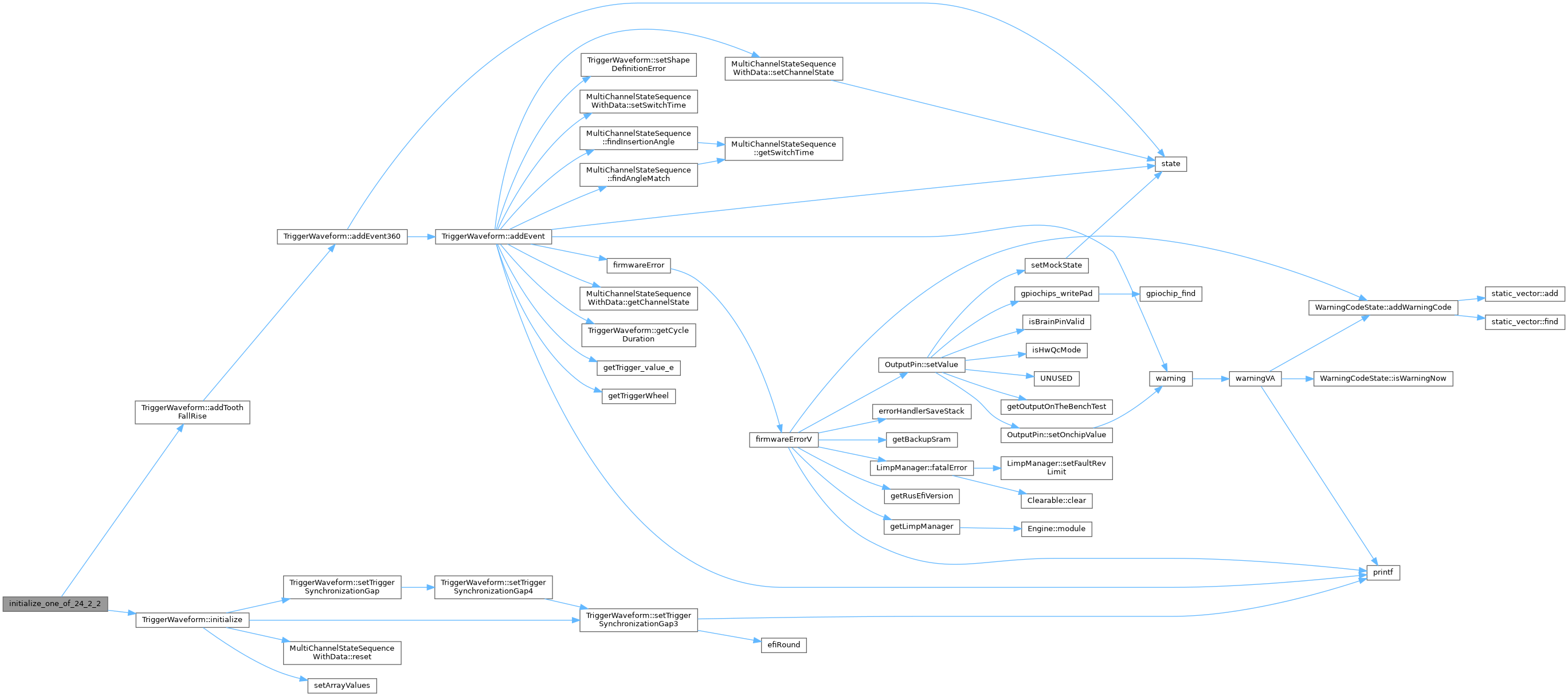
◆ initialize_one_of_24_2_2()
| void initialize_one_of_24_2_2 | ( | TriggerWaveform * | s, |
| int | firstCount, | ||
| int | secondCount | ||
| ) |
Definition at line 72 of file trigger_honda.cpp.
72 {
74
75 float narrow = 360 / 24;
76 float wide = narrow * 2;
77
78 float base = 0;
79
80 for (int i = 0; i < firstCount; i++) {
81 s->addToothFallRise(base + narrow, narrow / 2);
82 base += narrow;
83 }
84
85 s->addToothFallRise(base + wide, wide / 2);
86 base += wide;
87
88 for (int i = 0; i < secondCount; i++) {
89 s->addToothFallRise(base + narrow, narrow / 2);
90 base += narrow;
91 }
92
93 s->addToothFallRise(360, narrow/2);
94}
void addToothFallRise(angle_t angle, angle_t width=10, TriggerWheel const channelIndex=TriggerWheel::T_PRIMARY)
Definition trigger_structure.cpp:261
Referenced by configureHondaJ30A2_24_1_1().
Here is the call graph for this function:
Here is the caller graph for this function: