Detailed Description
- Date
- Feb 18, 2014
Definition in file trigger_mazda.h.
Functions | |
| void | initializeMazdaMiataNaShape (TriggerWaveform *s) |
| void | initializeMazdaMiataNb2Crank (TriggerWaveform *s) |
| void | initializeMazdaMiataVVtTestShape (TriggerWaveform *s) |
| void | configureMazdaProtegeSOHC (TriggerWaveform *s) |
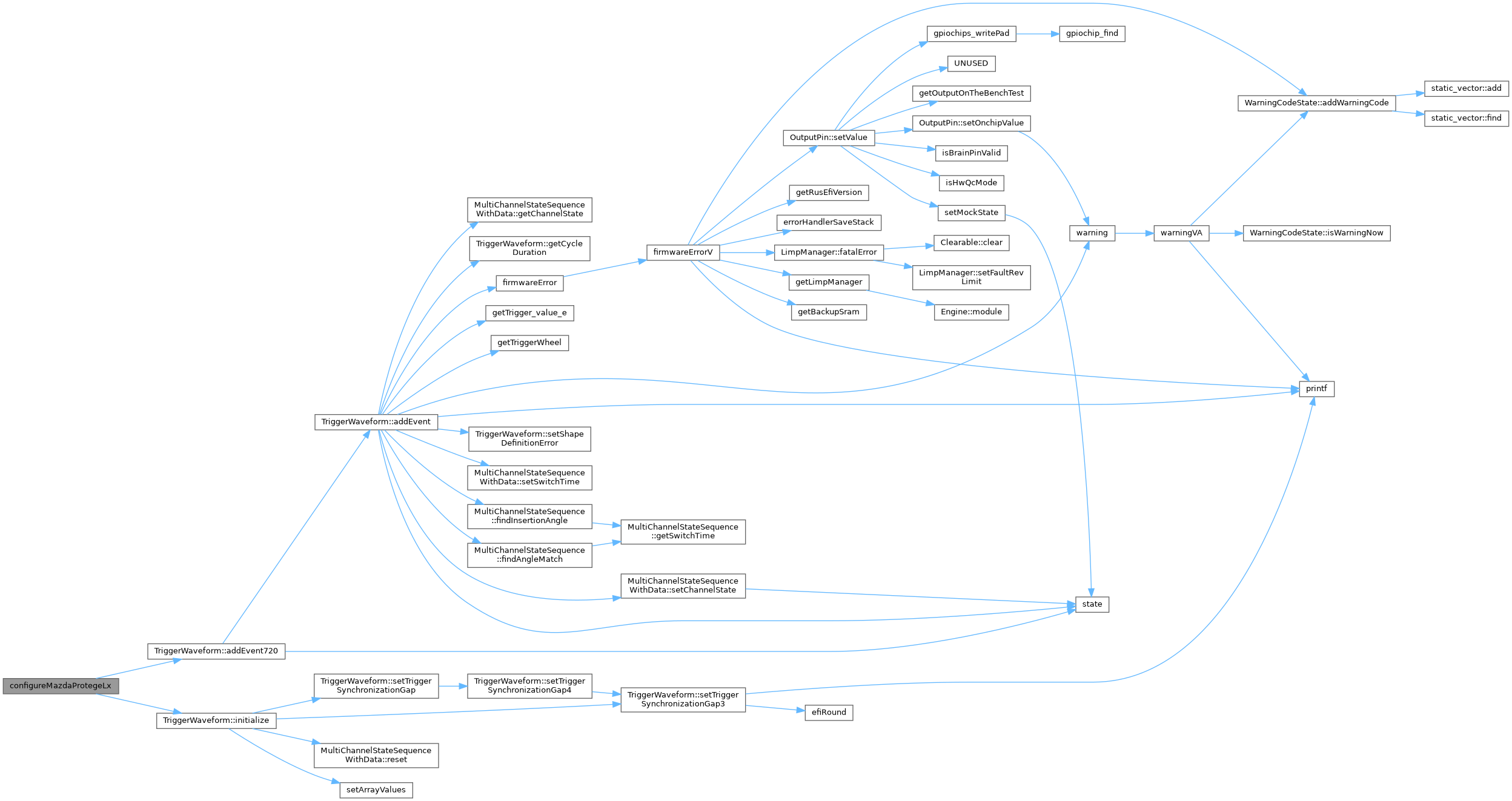
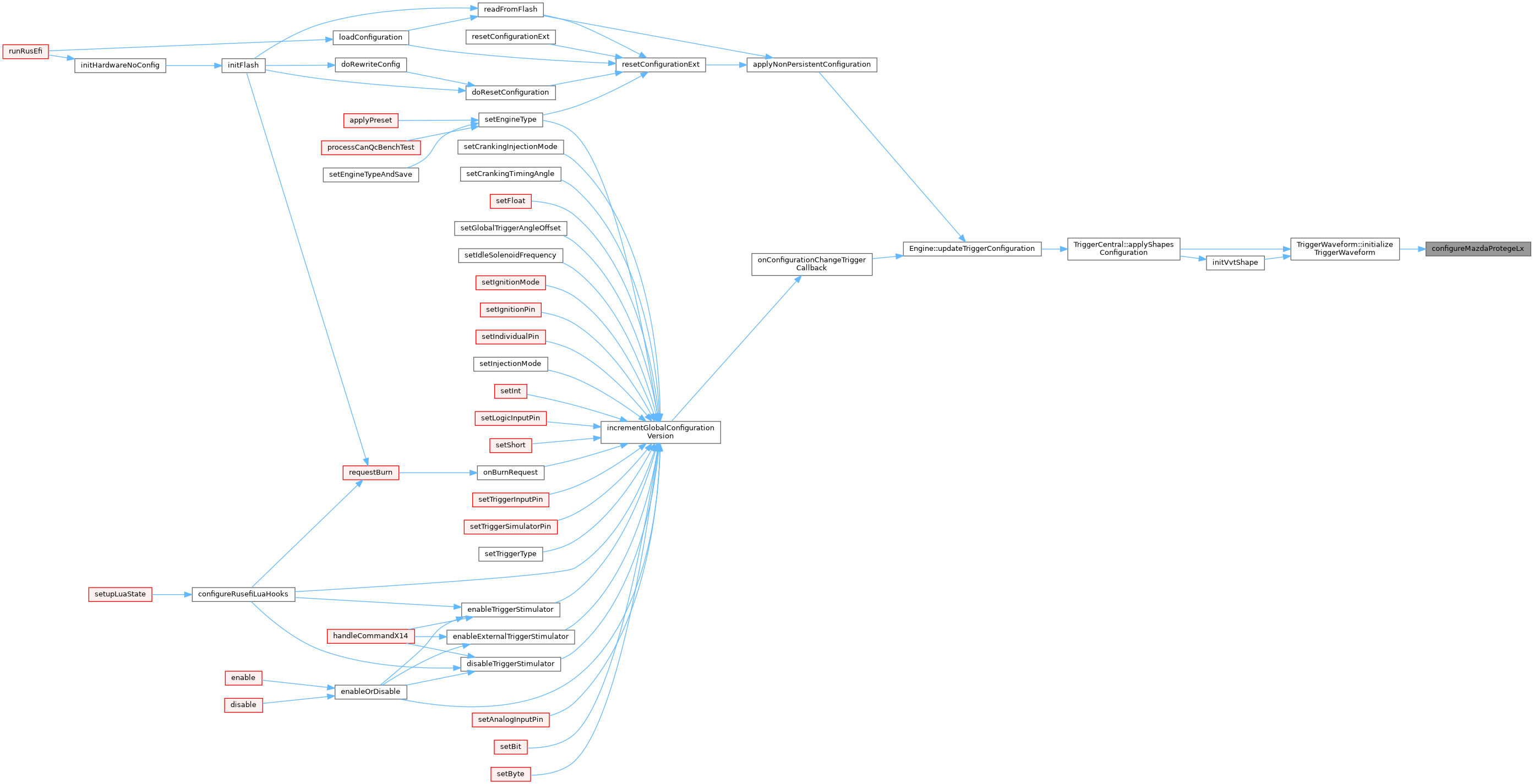
| void | configureMazdaProtegeLx (TriggerWaveform *s) |
| void | initializeMazdaMiataVVtCamShape (TriggerWaveform *s) |
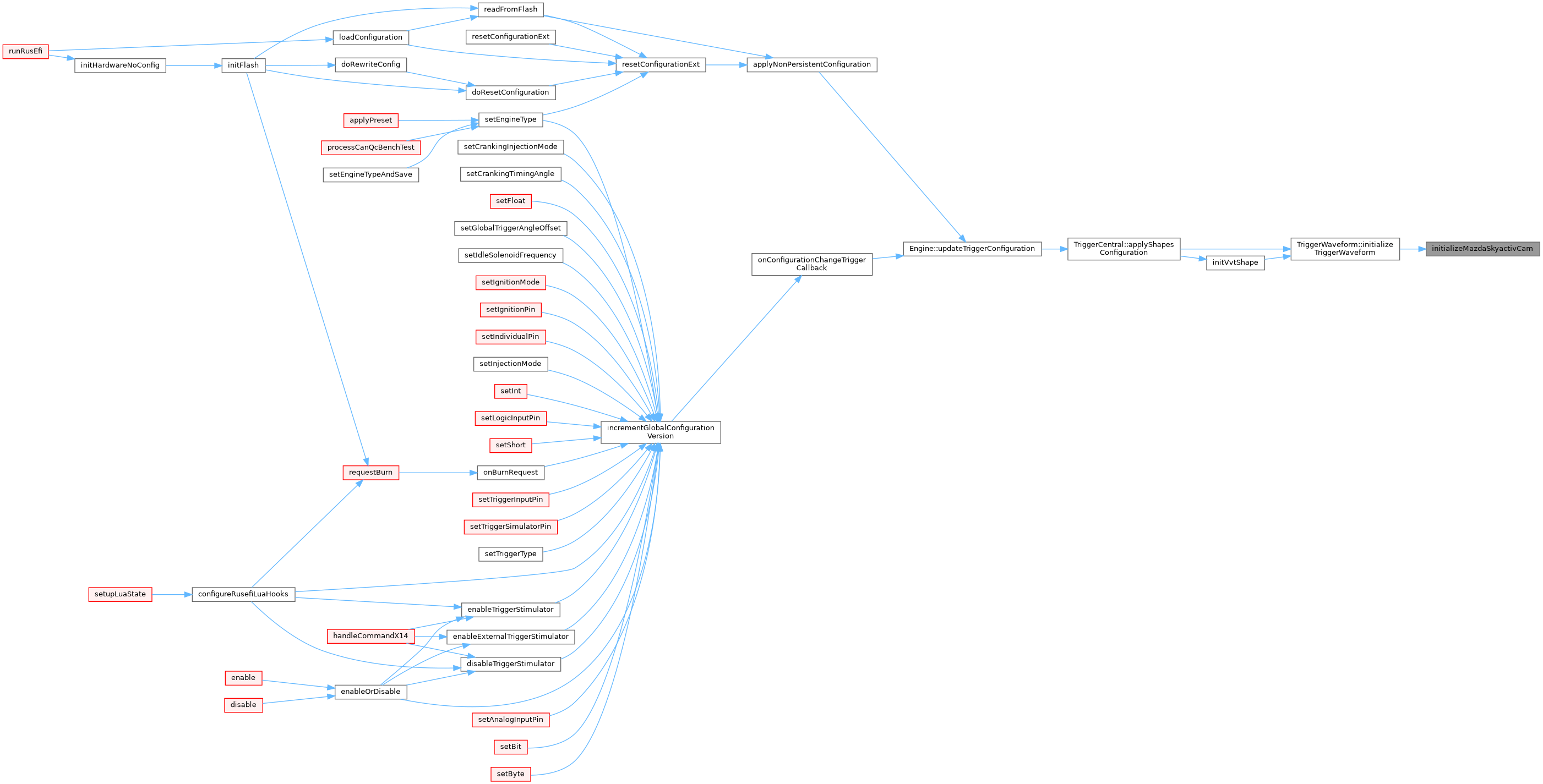
| void | initializeMazdaSkyactivCam (TriggerWaveform *s) |
| void | initializeMazdaLCam (TriggerWaveform *s) |
Function Documentation
◆ configureMazdaProtegeLx()
| void configureMazdaProtegeLx | ( | TriggerWaveform * | s | ) |
Definition at line 138 of file trigger_mazda.cpp.
Referenced by TriggerWaveform::initializeTriggerWaveform().
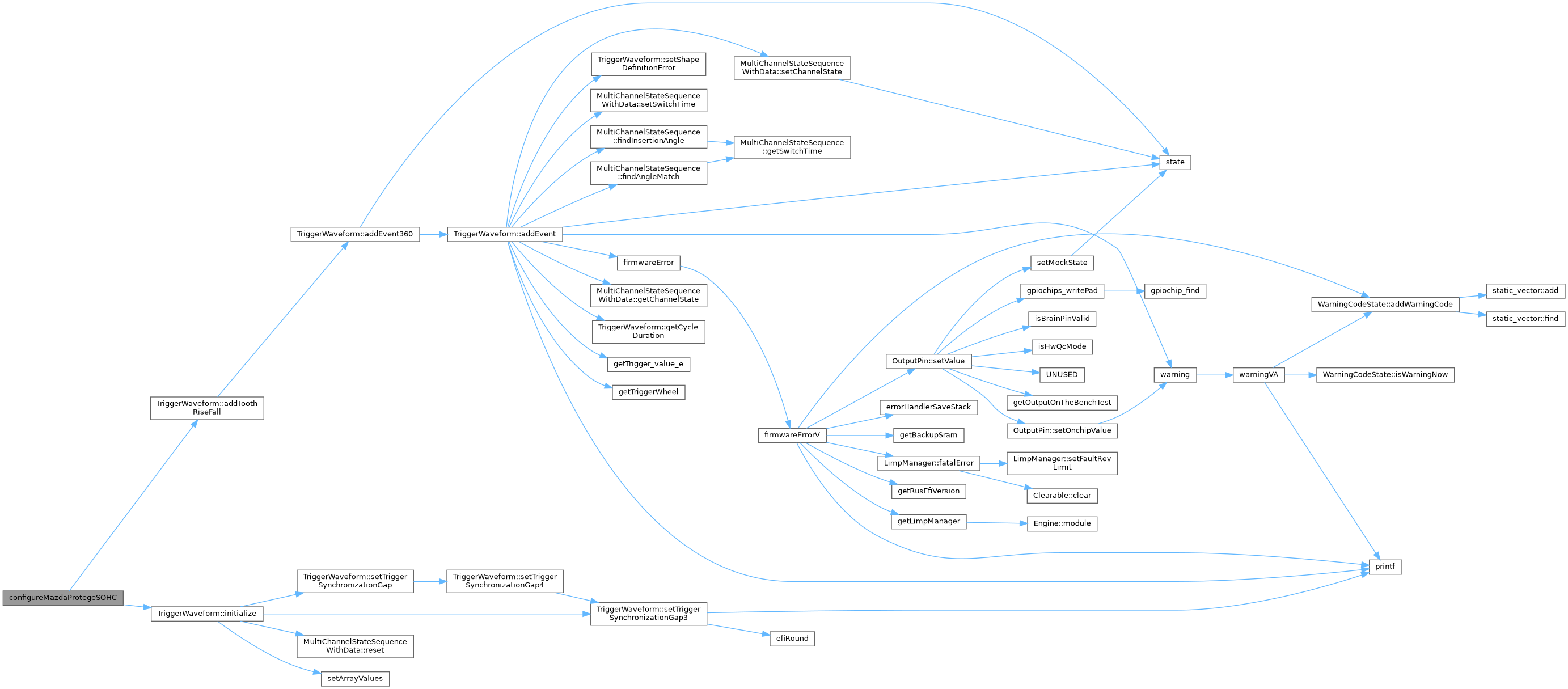
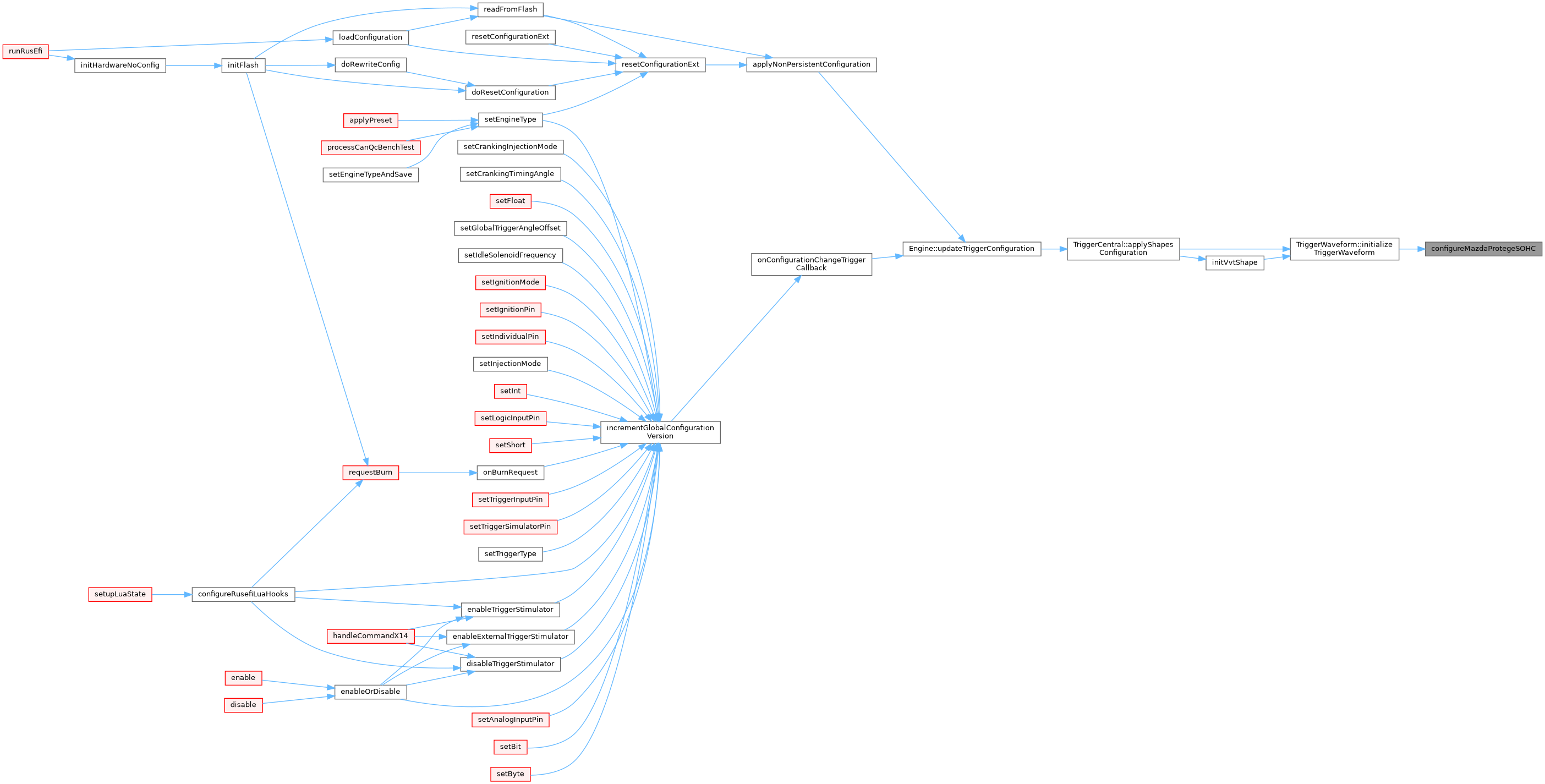
◆ configureMazdaProtegeSOHC()
| void configureMazdaProtegeSOHC | ( | TriggerWaveform * | s | ) |
Definition at line 120 of file trigger_mazda.cpp.
Referenced by TriggerWaveform::initializeTriggerWaveform().
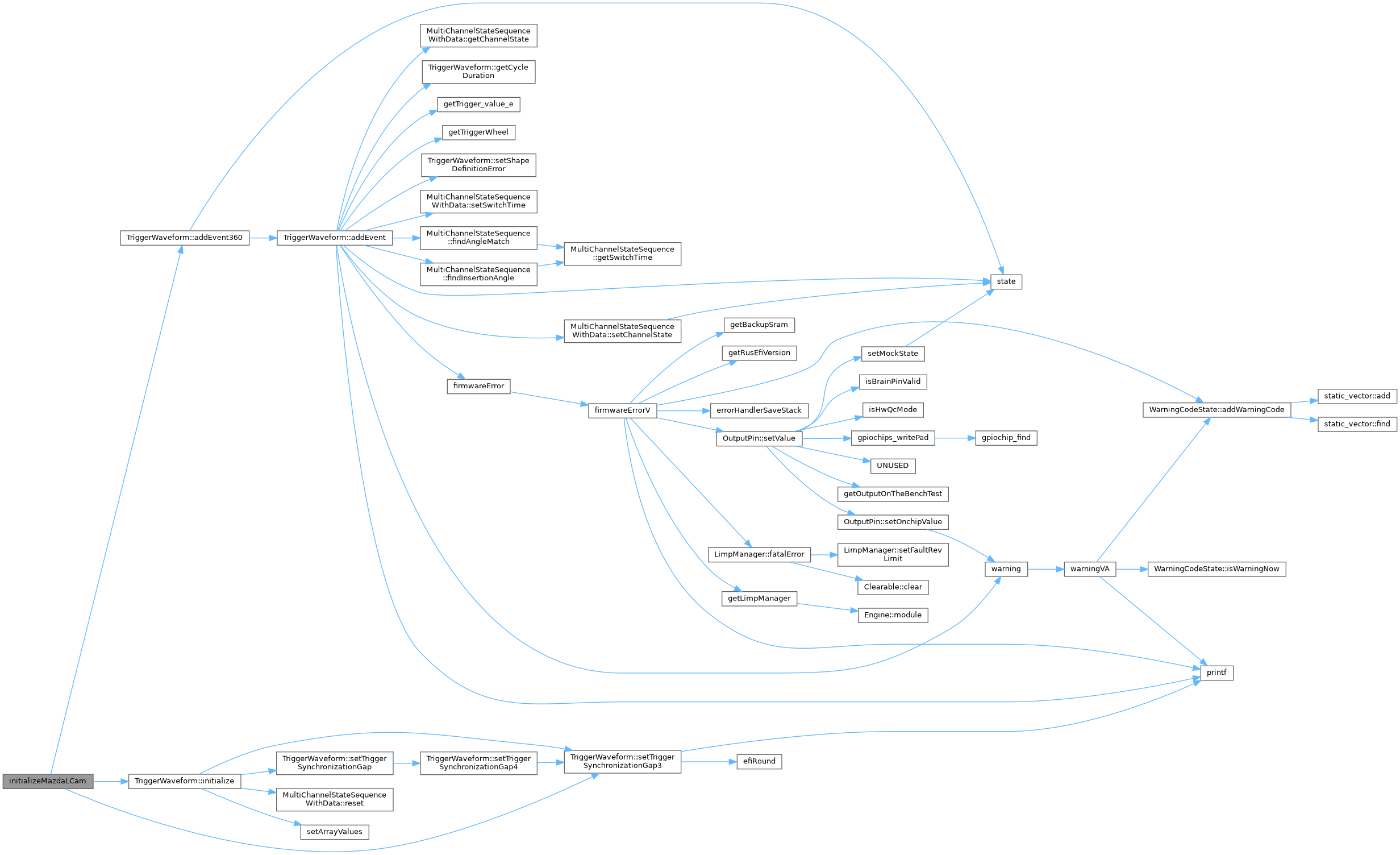
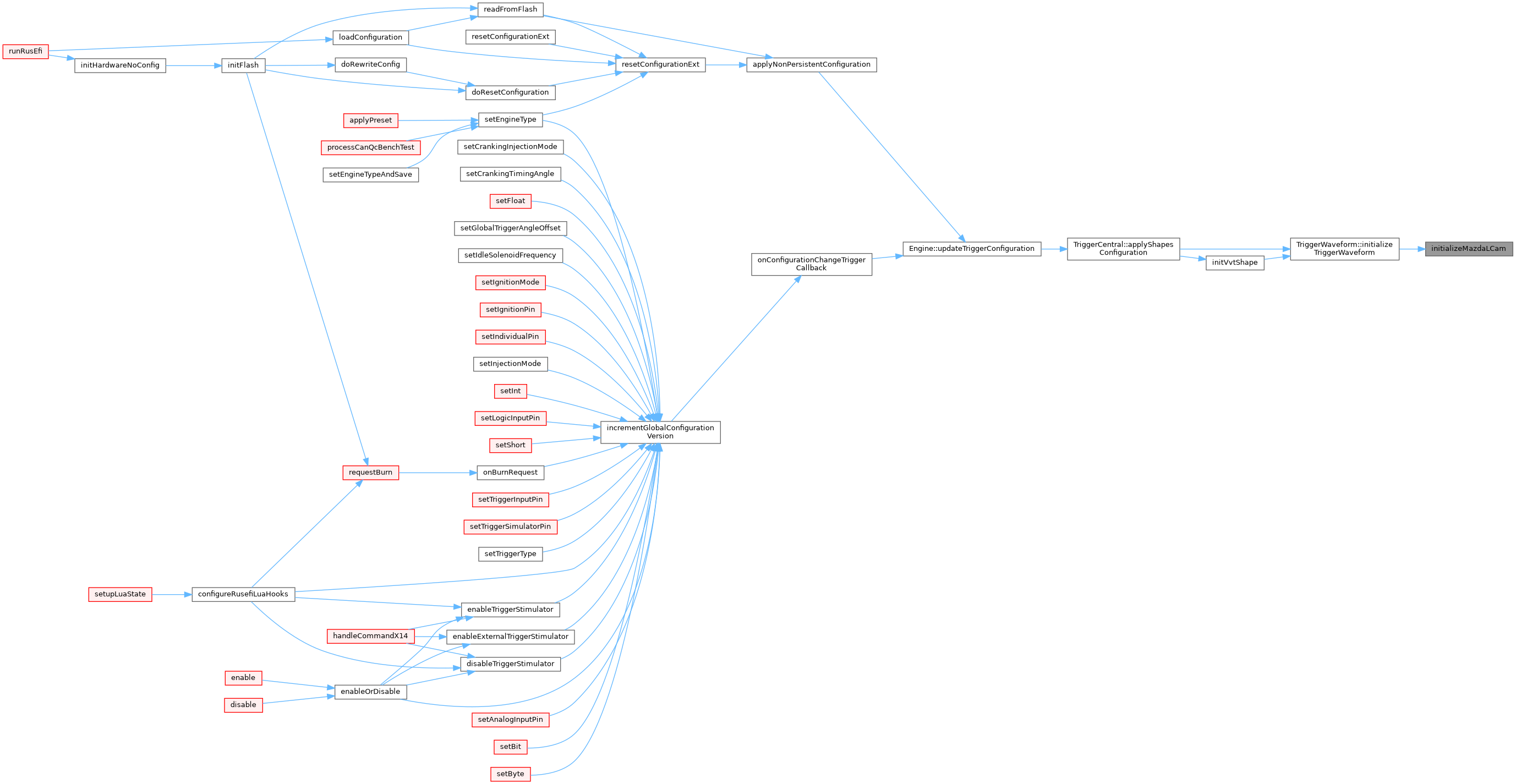
◆ initializeMazdaLCam()
| void initializeMazdaLCam | ( | TriggerWaveform * | s | ) |
Definition at line 204 of file trigger_mazda.cpp.
Referenced by TriggerWaveform::initializeTriggerWaveform().
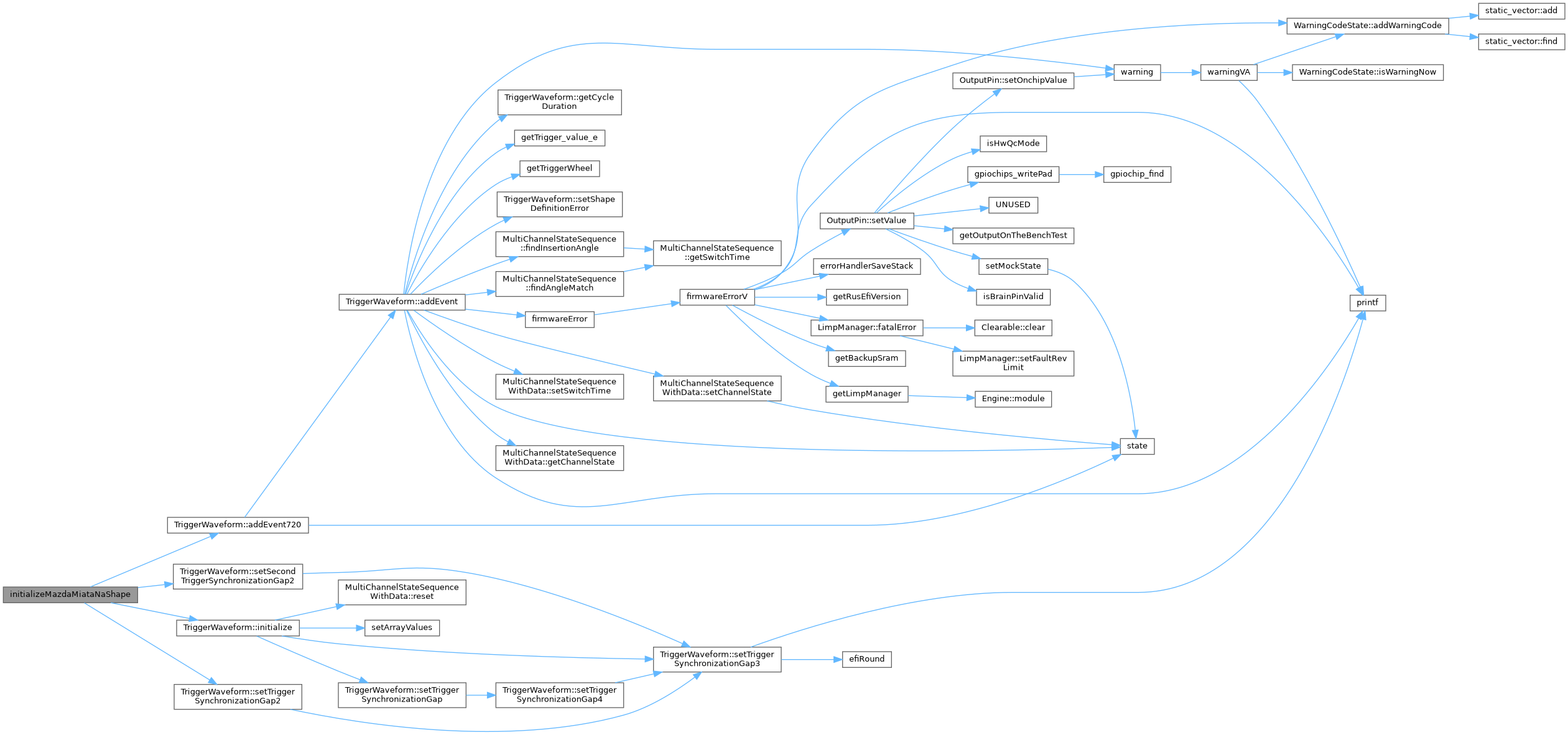
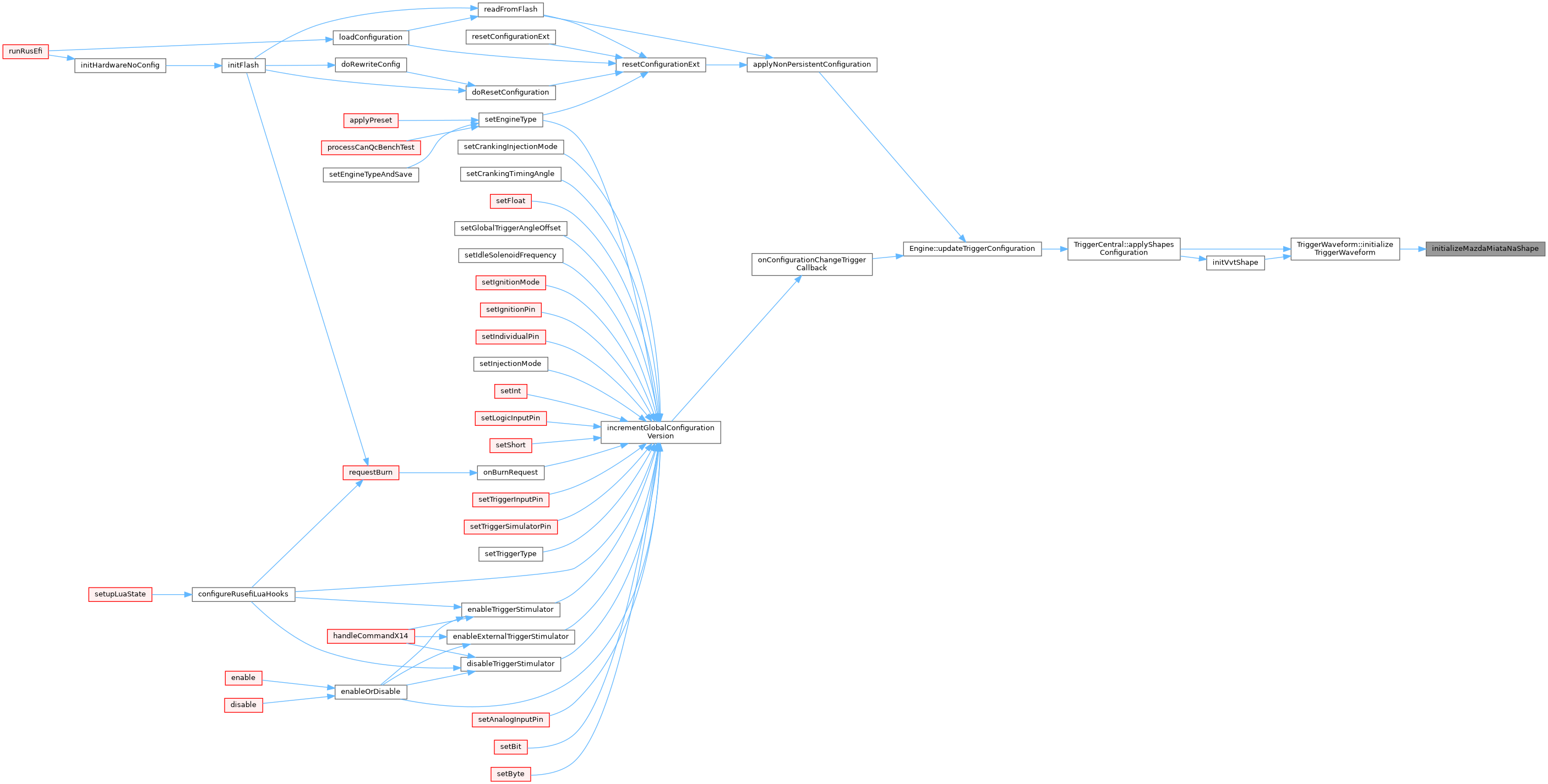
◆ initializeMazdaMiataNaShape()
| void initializeMazdaMiataNaShape | ( | TriggerWaveform * | s | ) |
http://rusefi.com/forum/viewtopic.php?f=3&t=729&p=12983#p12983
Definition at line 27 of file trigger_mazda.cpp.
Referenced by TriggerWaveform::initializeTriggerWaveform().
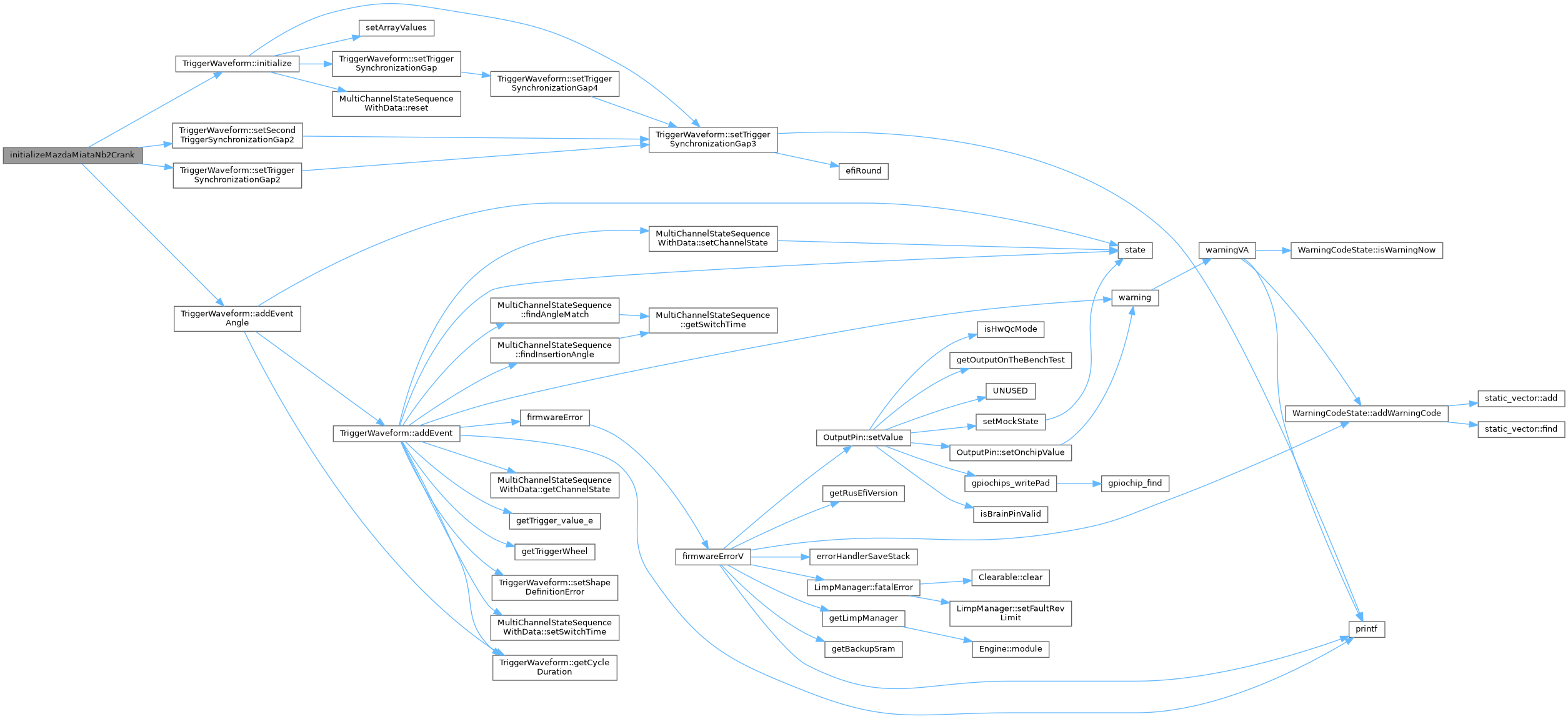
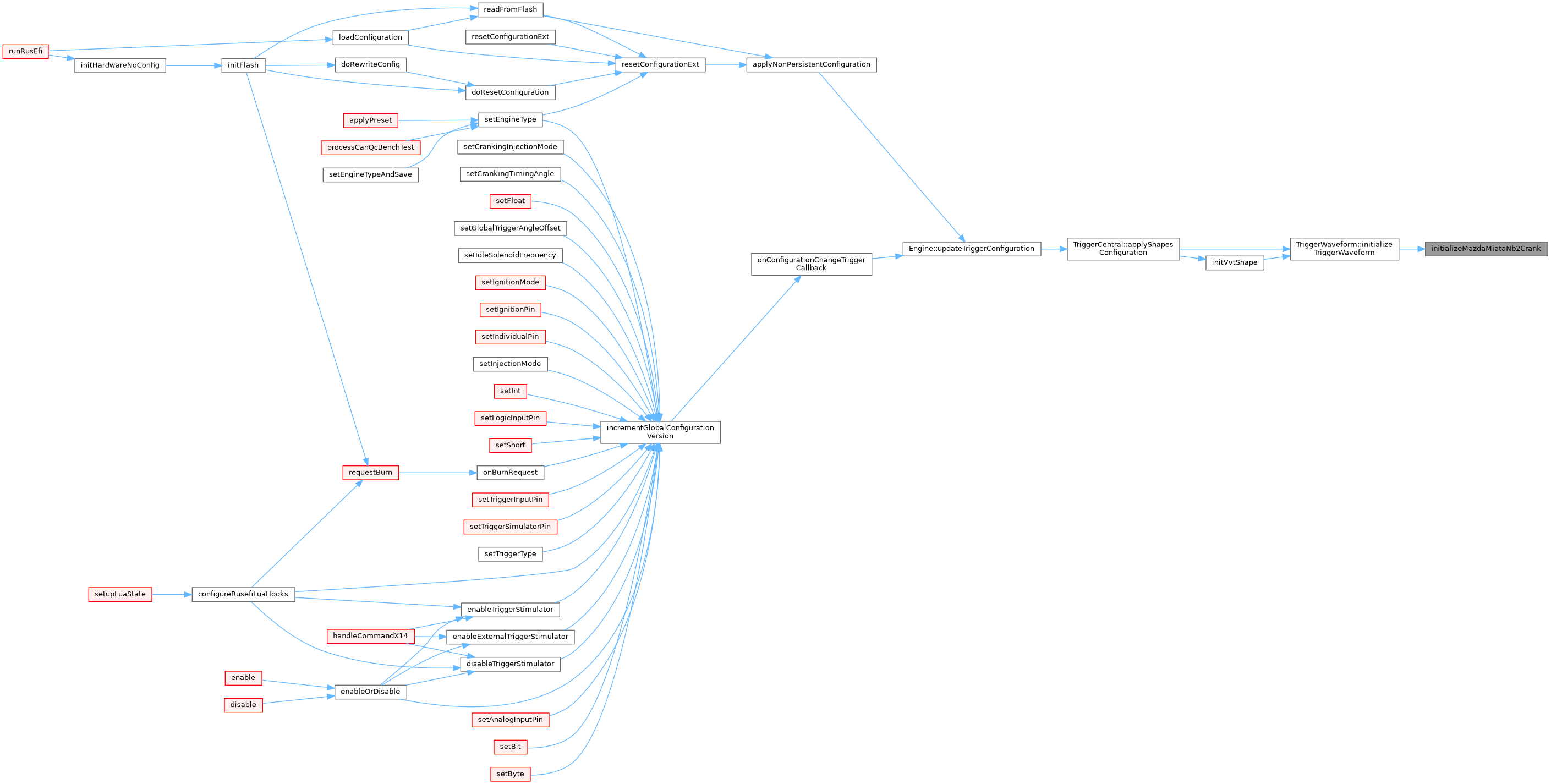
◆ initializeMazdaMiataNb2Crank()
| void initializeMazdaMiataNb2Crank | ( | TriggerWaveform * | s | ) |
Note how we use 0..180 range while defining FOUR_STROKE_SYMMETRICAL_CRANK_SENSOR trigger Note that only half of the physical wheel is defined here!
Definition at line 60 of file trigger_mazda.cpp.
Referenced by TriggerWaveform::initializeTriggerWaveform().
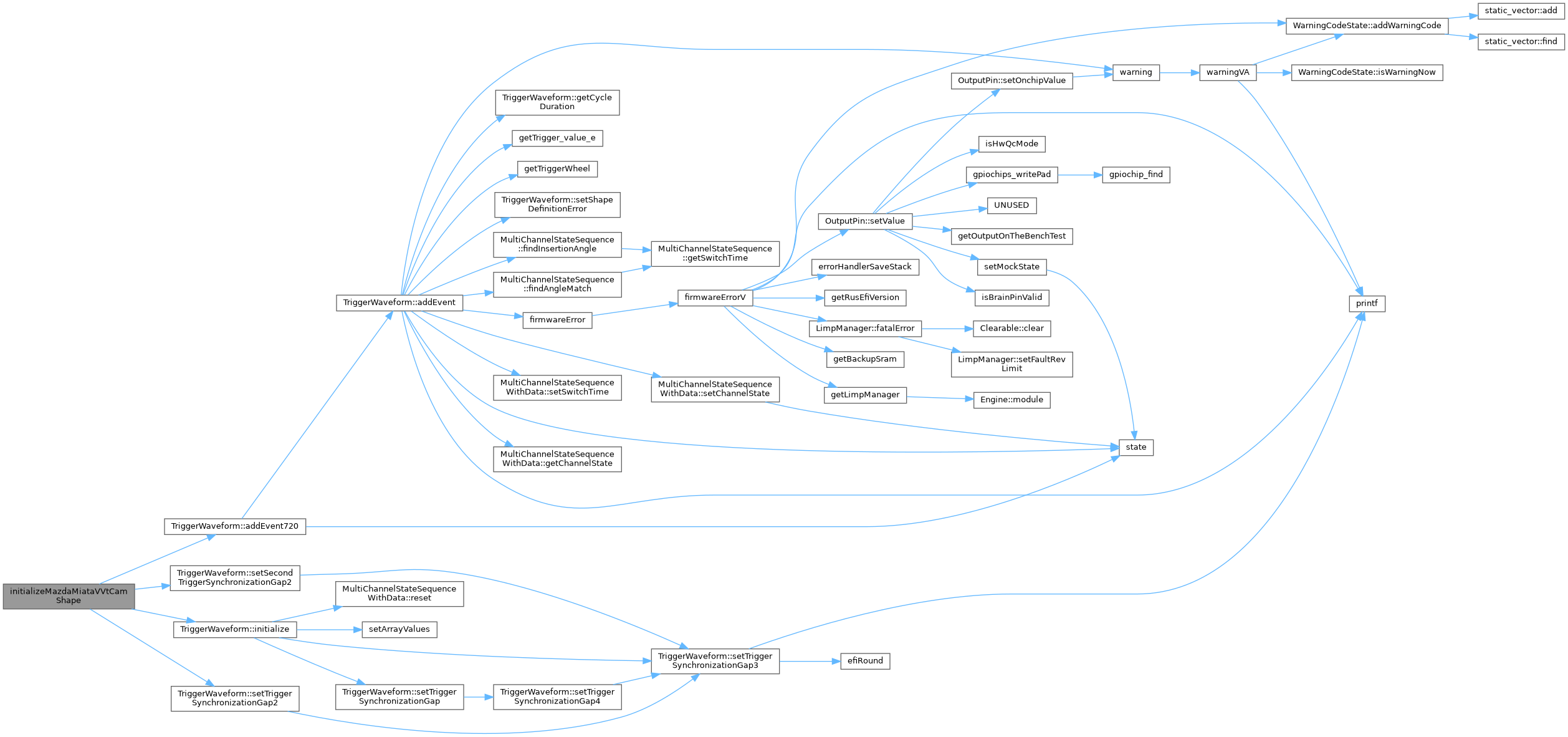
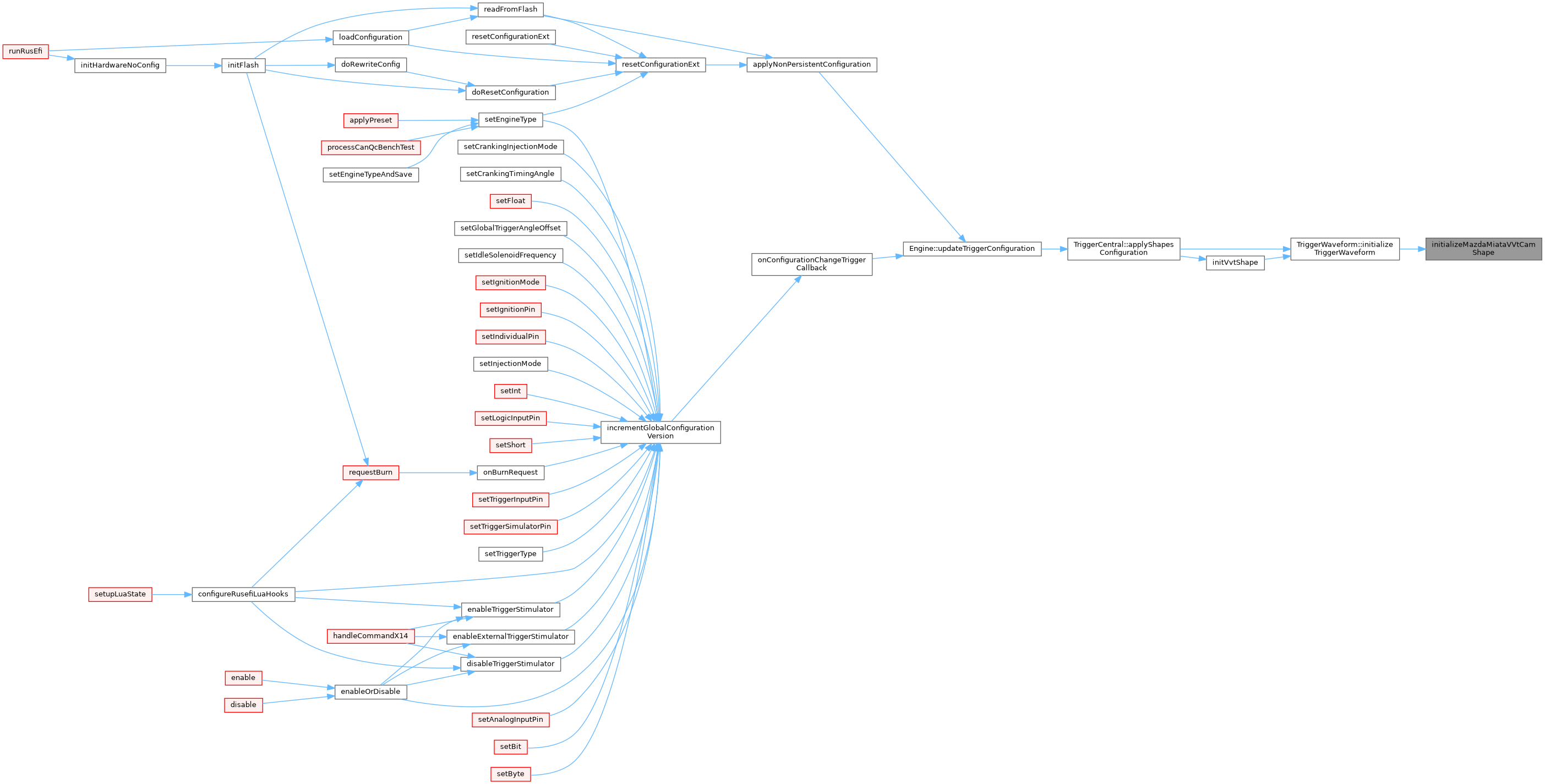
◆ initializeMazdaMiataVVtCamShape()
| void initializeMazdaMiataVVtCamShape | ( | TriggerWaveform * | s | ) |
TT_VVT_MIATA_NB2 if you unplug crank sensor you can start & run your engine on just this cam decoder trigger offset "-90" seems to be doing the job
same decoder is used for VVT processing
Definition at line 164 of file trigger_mazda.cpp.
Referenced by TriggerWaveform::initializeTriggerWaveform().
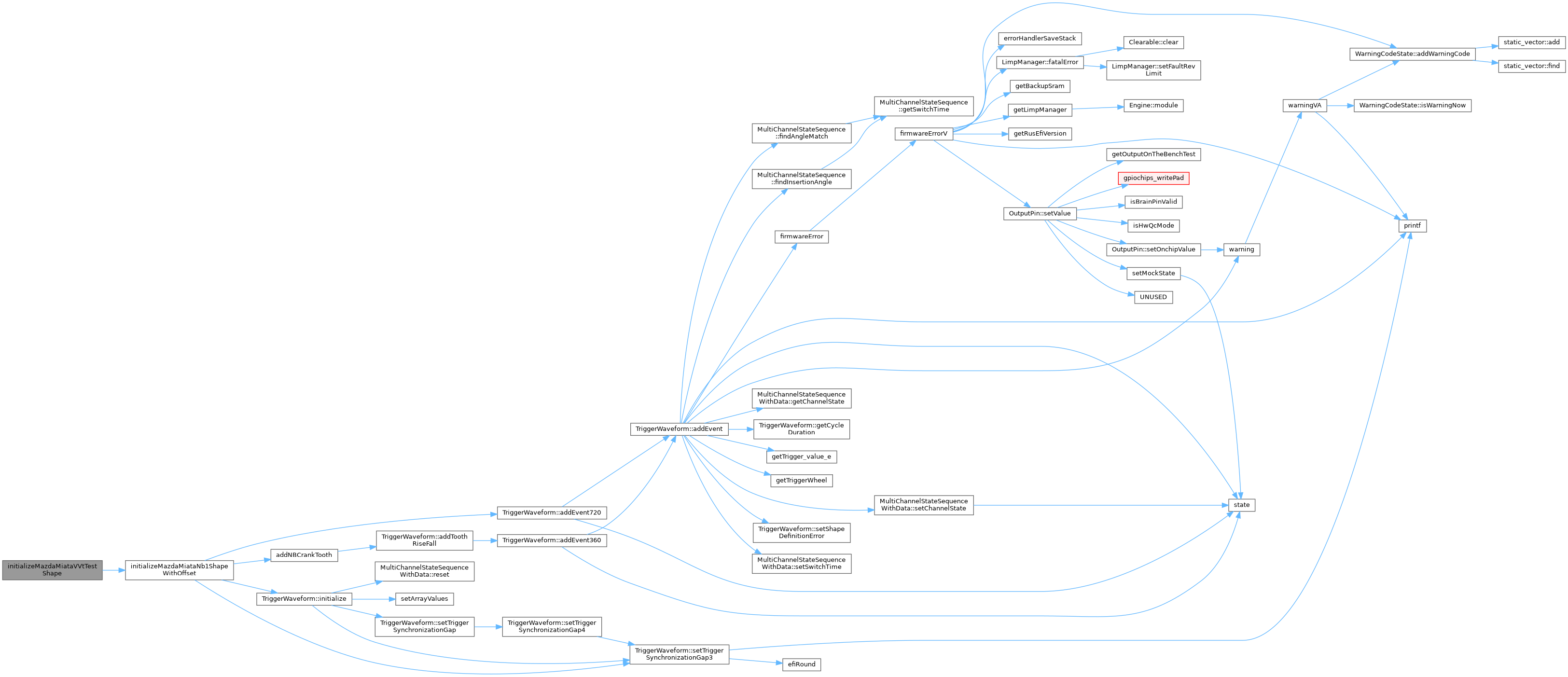
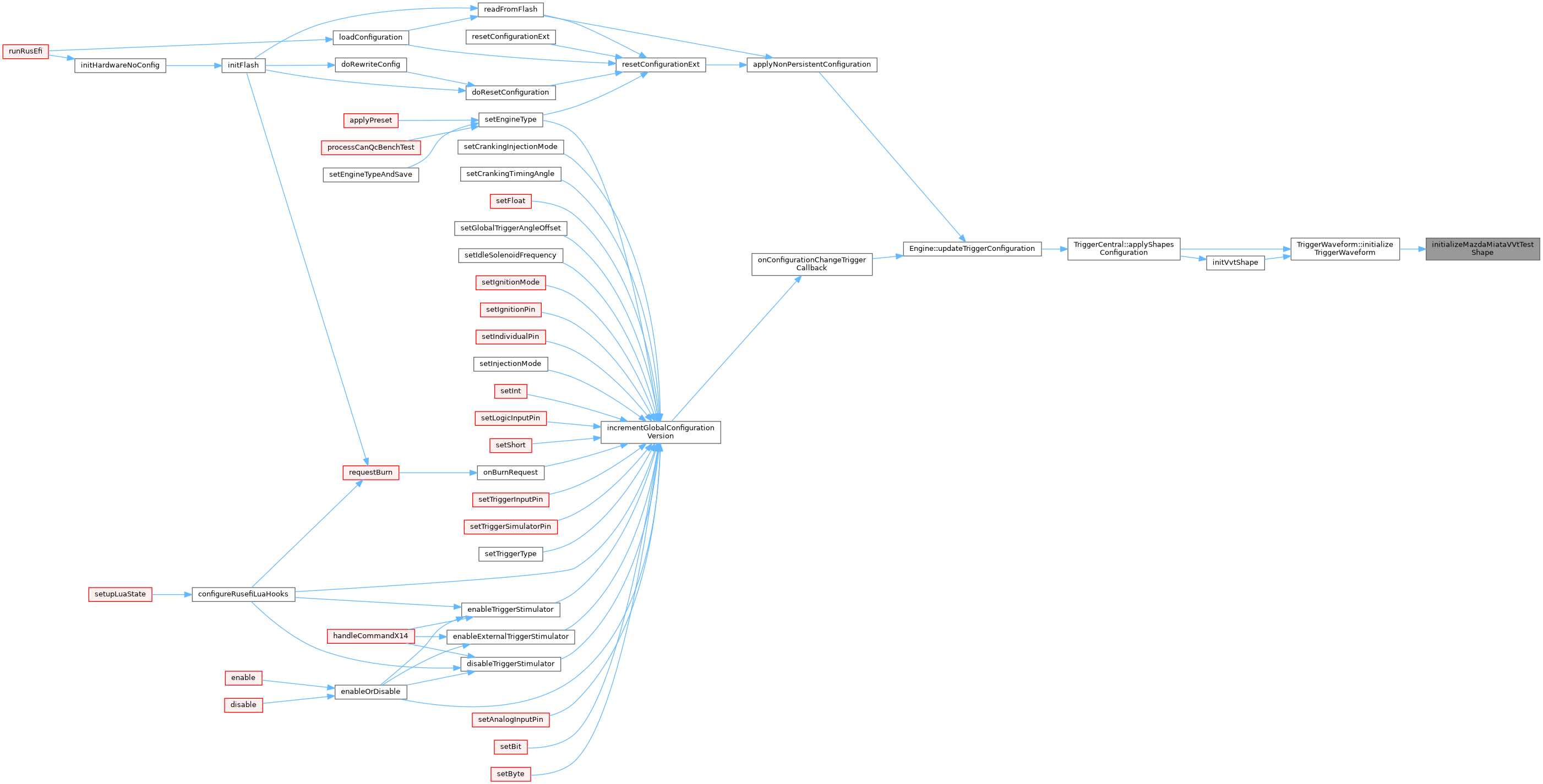
◆ initializeMazdaMiataVVtTestShape()
| void initializeMazdaMiataVVtTestShape | ( | TriggerWaveform * | s | ) |
Definition at line 116 of file trigger_mazda.cpp.
Referenced by TriggerWaveform::initializeTriggerWaveform().
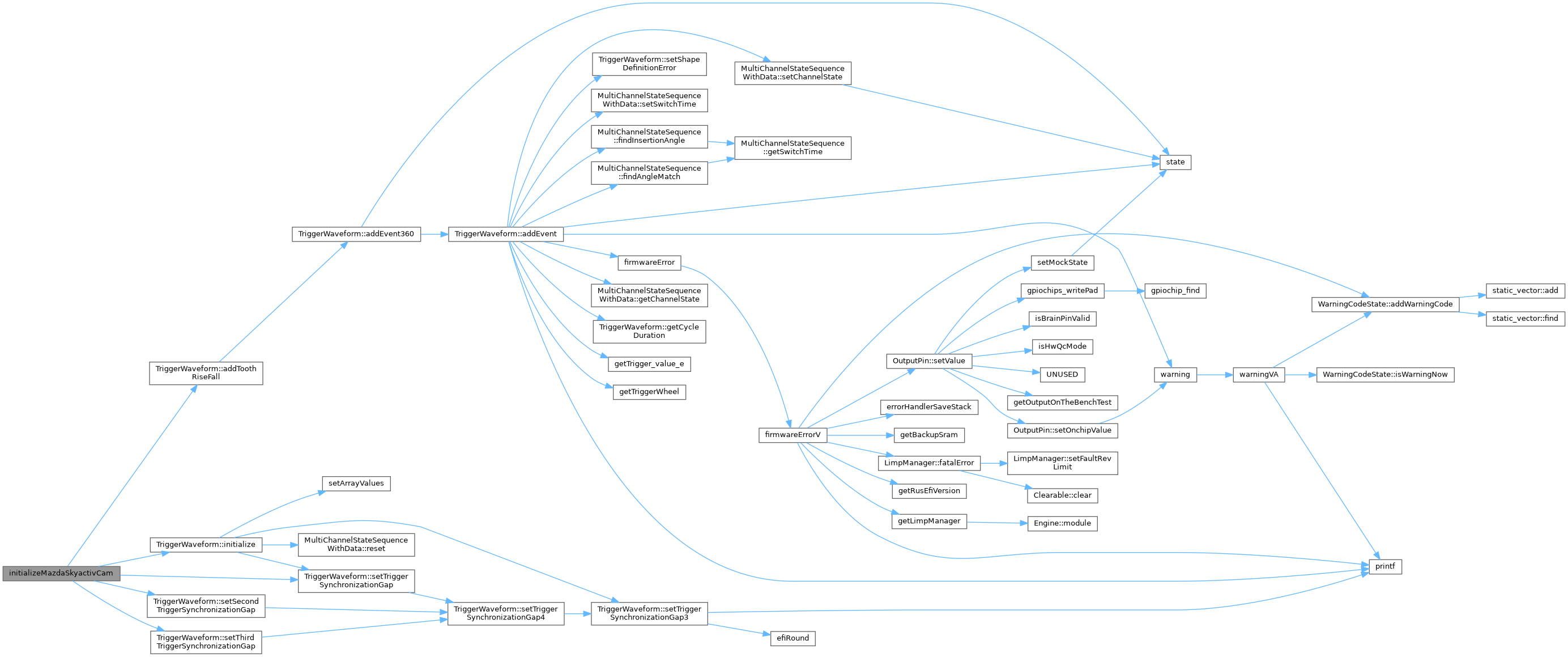
◆ initializeMazdaSkyactivCam()
| void initializeMazdaSkyactivCam | ( | TriggerWaveform * | s | ) |
Definition at line 184 of file trigger_mazda.cpp.
Referenced by TriggerWaveform::initializeTriggerWaveform().