Detailed Description
- Date
- Sep 10, 2015
Definition in file trigger_subaru.cpp.
Functions | |
| void | initialize_one_of_36_2_2_2 (TriggerWaveform *s, int firstCount, int secondCount) |
| void | initialize36_2_2_2 (TriggerWaveform *s) |
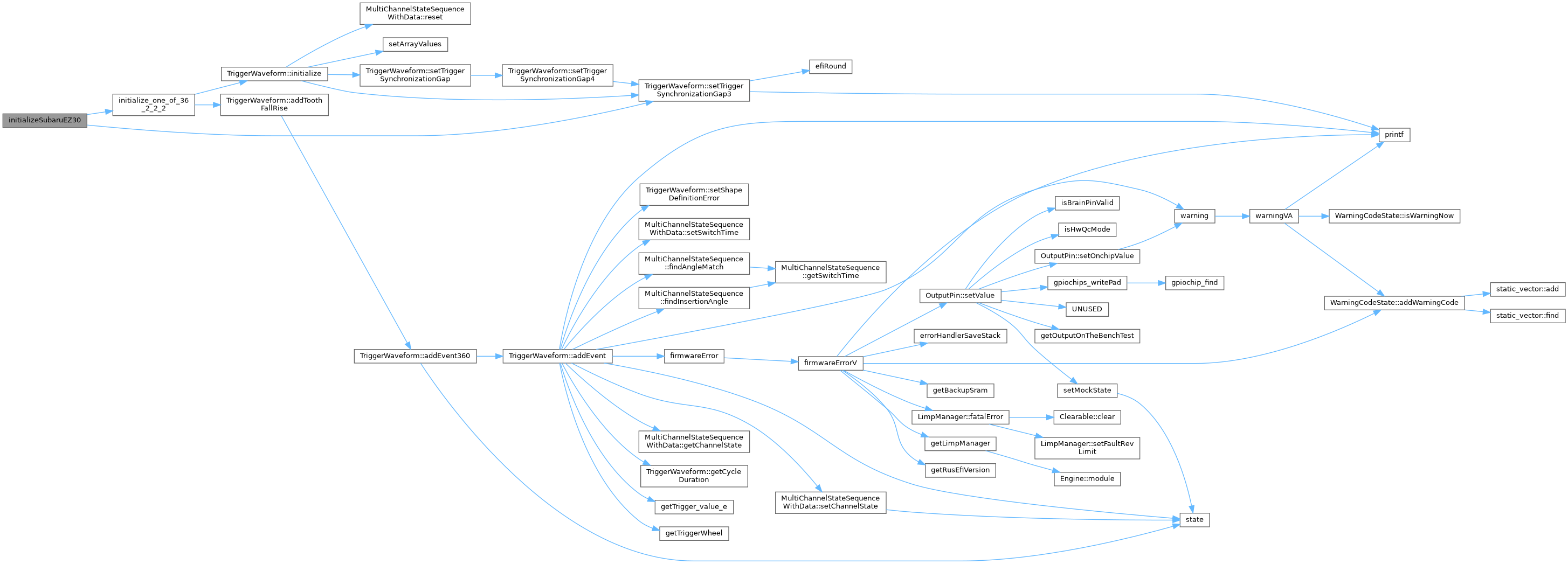
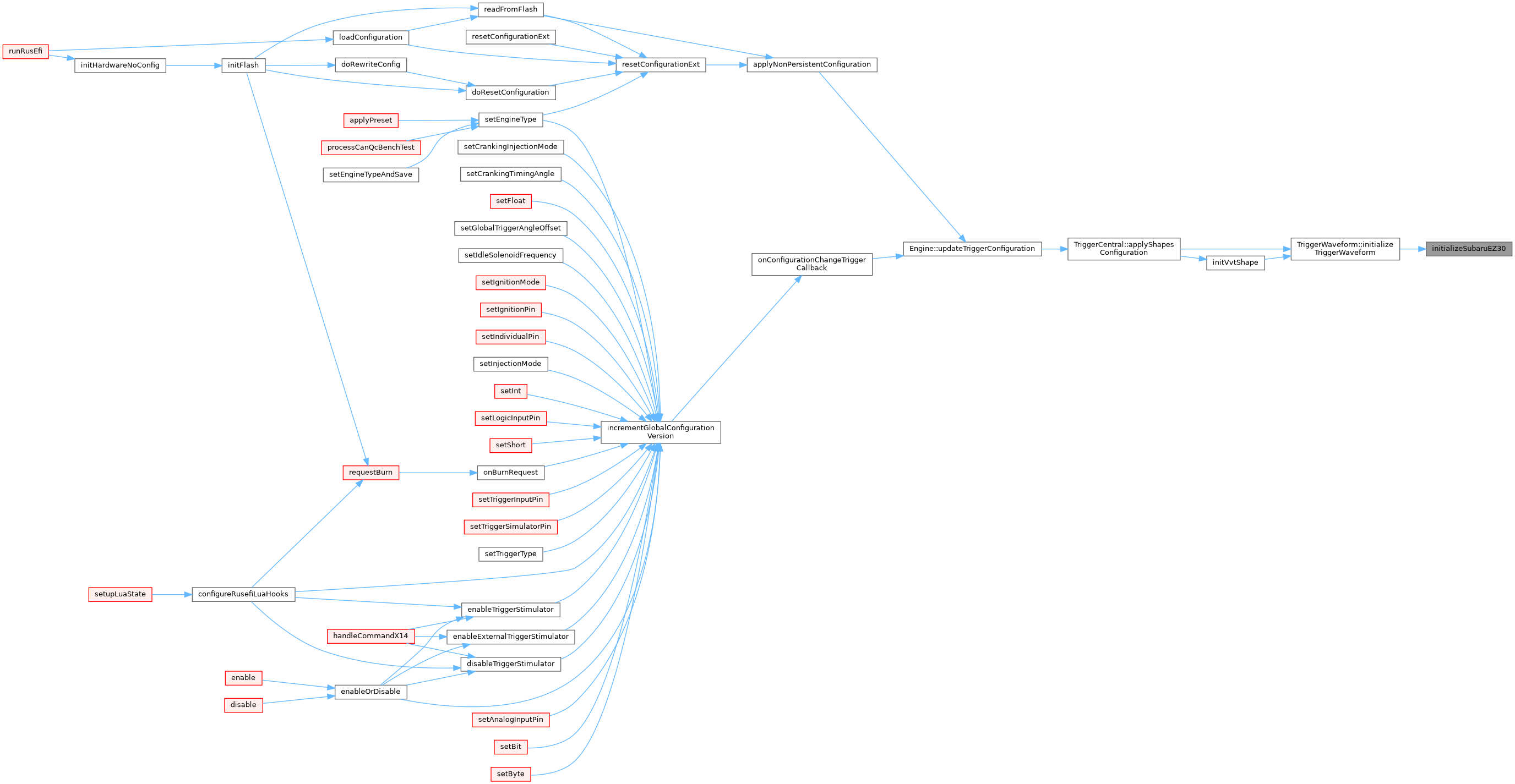
| void | initializeSubaruEZ30 (TriggerWaveform *s) |
| static void | initializeSubaru7_6 (TriggerWaveform *s, bool withCrankWheel) |
| void | initializeSubaru7_6 (TriggerWaveform *s) |
| void | initializeSubaru7_6_camOnly (TriggerWaveform *s) |
| void | initializeSubaruOnly7 (TriggerWaveform *s) |
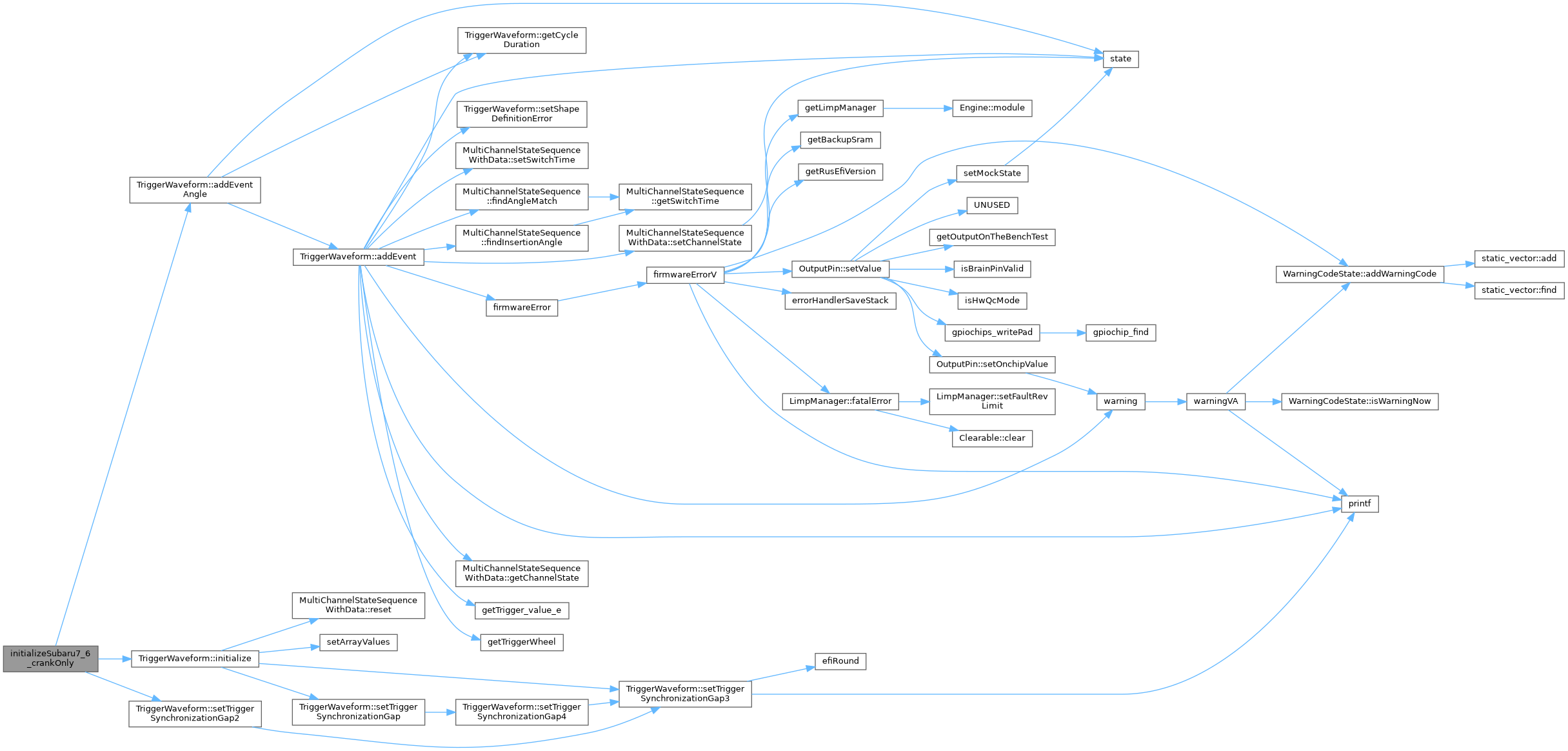
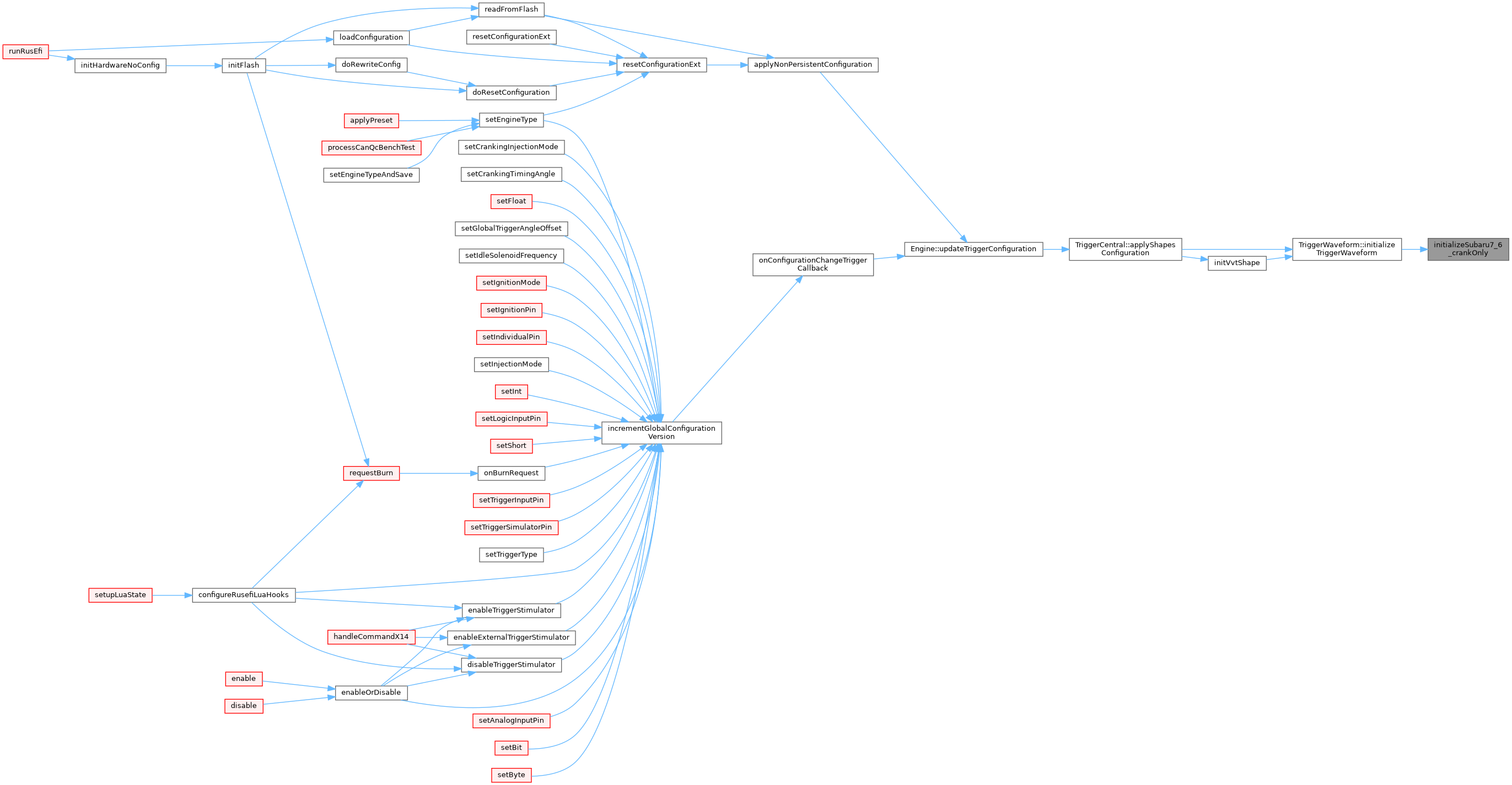
| void | initializeSubaru7_6_crankOnly (TriggerWaveform *s) |
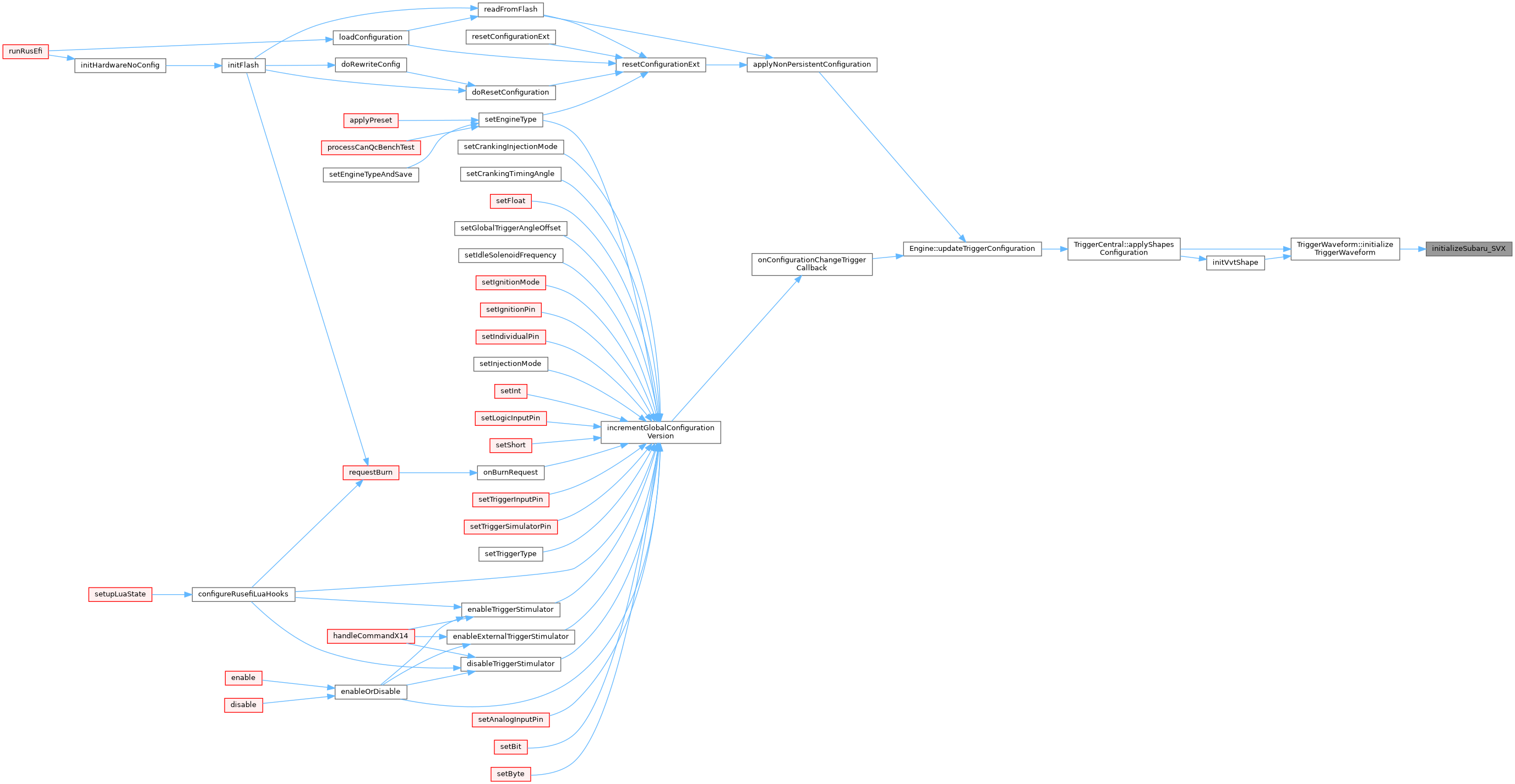
| void | initializeSubaru_SVX (TriggerWaveform *s) |
Function Documentation
◆ initialize36_2_2_2()
| void initialize36_2_2_2 | ( | TriggerWaveform * | s | ) |
This trigger is also used by Nissan and Mazda https://rusefi.com/forum/viewtopic.php?f=2&t=1932
Definition at line 43 of file trigger_subaru.cpp.
Referenced by TriggerWaveform::initializeTriggerWaveform().
◆ initialize_one_of_36_2_2_2()
| void initialize_one_of_36_2_2_2 | ( | TriggerWaveform * | s, |
| int | firstCount, | ||
| int | secondCount | ||
| ) |
Definition at line 12 of file trigger_subaru.cpp.
Referenced by initialize36_2_2_2(), and initializeSubaruEZ30().
◆ initializeSubaru7_6() [1/2]
| void initializeSubaru7_6 | ( | TriggerWaveform * | s | ) |
Definition at line 159 of file trigger_subaru.cpp.

◆ initializeSubaru7_6() [2/2]
|
static |
Definition at line 69 of file trigger_subaru.cpp.
Referenced by initializeSubaru7_6(), and TriggerWaveform::initializeTriggerWaveform().

◆ initializeSubaru7_6_camOnly()
| void initializeSubaru7_6_camOnly | ( | TriggerWaveform * | s | ) |
Definition at line 163 of file trigger_subaru.cpp.
Referenced by initializeSubaruOnly7().

◆ initializeSubaru7_6_crankOnly()
| void initializeSubaru7_6_crankOnly | ( | TriggerWaveform * | s | ) |
Note how we use 0..180 range while defining FOUR_STROKE_SYMMETRICAL_CRANK_SENSOR trigger Note that only half of the physical wheel is defined here!
Definition at line 215 of file trigger_subaru.cpp.
Referenced by TriggerWaveform::initializeTriggerWaveform().
◆ initializeSubaru_SVX()
| void initializeSubaru_SVX | ( | TriggerWaveform * | s | ) |
Definition at line 266 of file trigger_subaru.cpp.
Referenced by TriggerWaveform::initializeTriggerWaveform().

◆ initializeSubaruEZ30()
| void initializeSubaruEZ30 | ( | TriggerWaveform * | s | ) |
Definition at line 59 of file trigger_subaru.cpp.
Referenced by TriggerWaveform::initializeTriggerWaveform().
◆ initializeSubaruOnly7()
| void initializeSubaruOnly7 | ( | TriggerWaveform * | s | ) |
Definition at line 210 of file trigger_subaru.cpp.
Referenced by TriggerWaveform::initializeTriggerWaveform().