Functions | |
| void | initializeSuzukiG13B (TriggerWaveform *s) |
| void | initializeSuzukiK6A (TriggerWaveform *s) |
Function Documentation
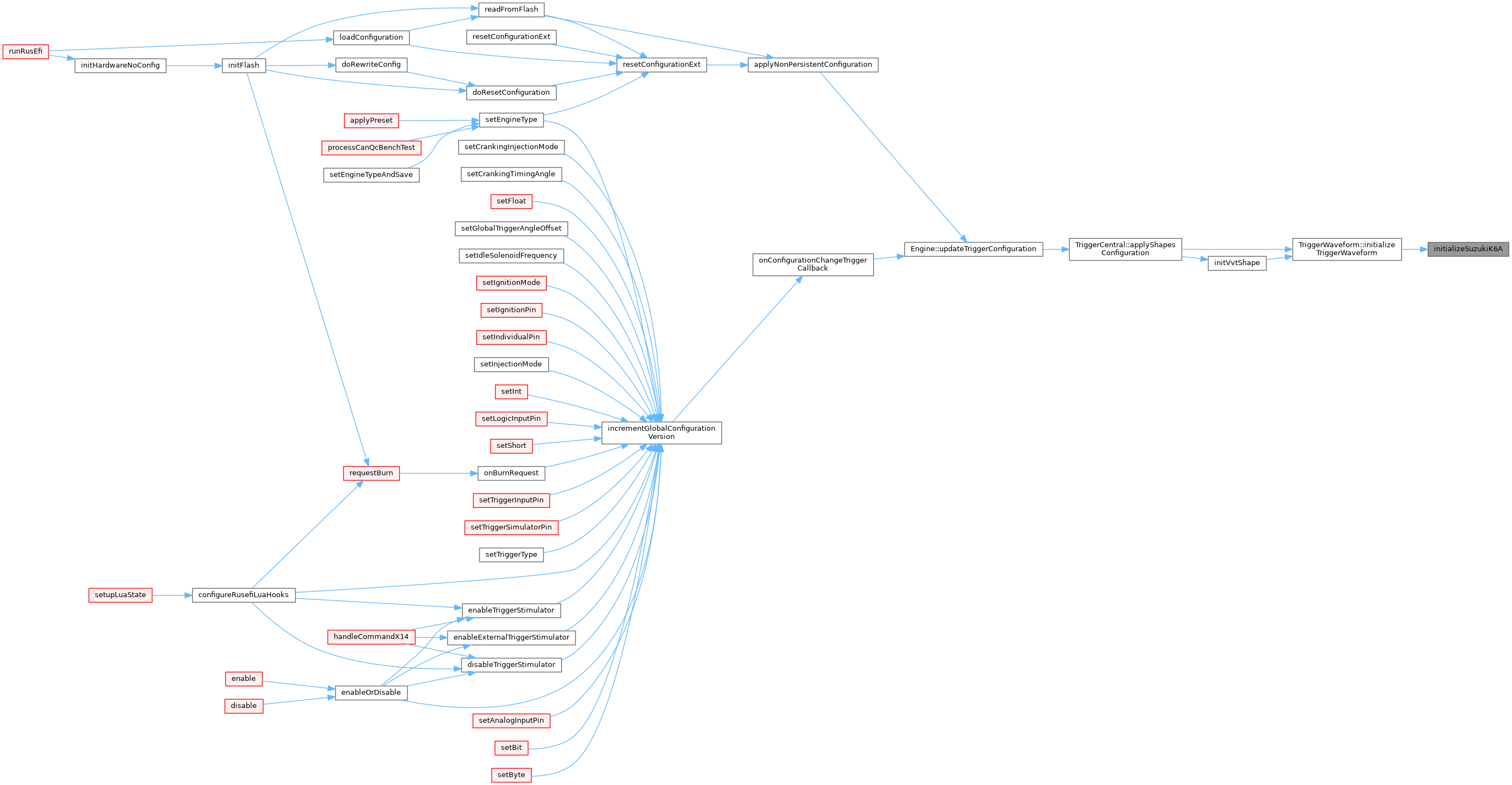
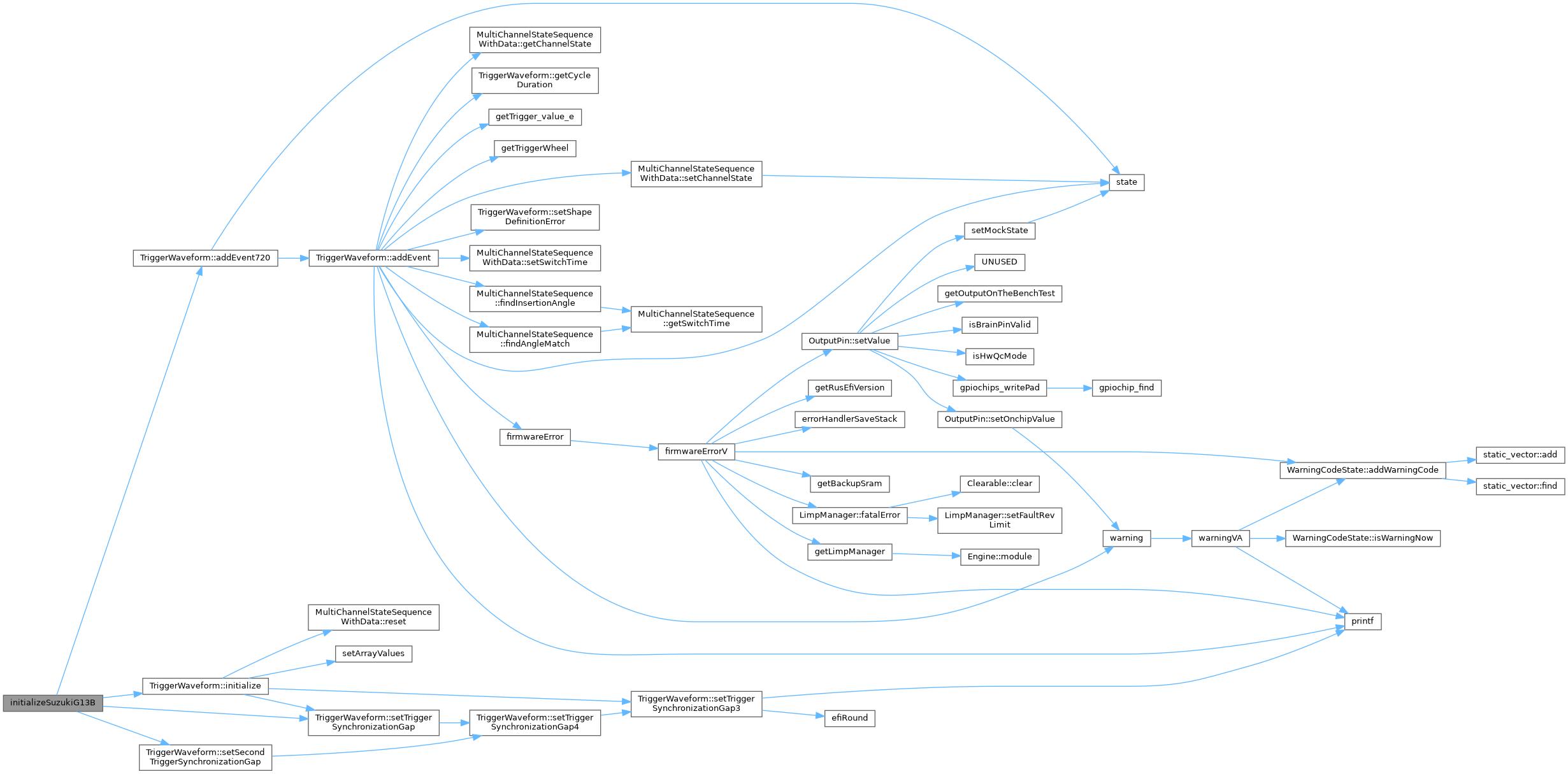
◆ initializeSuzukiG13B()
| void initializeSuzukiG13B | ( | TriggerWaveform * | s | ) |
Definition at line 12 of file trigger_suzuki.cpp.
12 {
14
15 float w = 5;
16 float specialTooth = 20;
17
20
23
26
29
32
33 s->setTriggerSynchronizationGap(0.22);
34 s->setSecondTriggerSynchronizationGap(1);
35}
void initialize(operation_mode_e operationMode, SyncEdge syncEdge)
Definition trigger_structure.cpp:65
void setSecondTriggerSynchronizationGap(float syncRatio)
Definition trigger_structure.cpp:427
void setTriggerSynchronizationGap(float syncRatio)
Definition trigger_structure.cpp:423
void addEvent720(angle_t angle, TriggerValue const state, TriggerWheel const channelIndex=TriggerWheel::T_PRIMARY)
Definition trigger_structure.cpp:246
@ RISE
@ FALL
@ RiseOnly
Referenced by TriggerWaveform::initializeTriggerWaveform().
Here is the call graph for this function:
Here is the caller graph for this function:
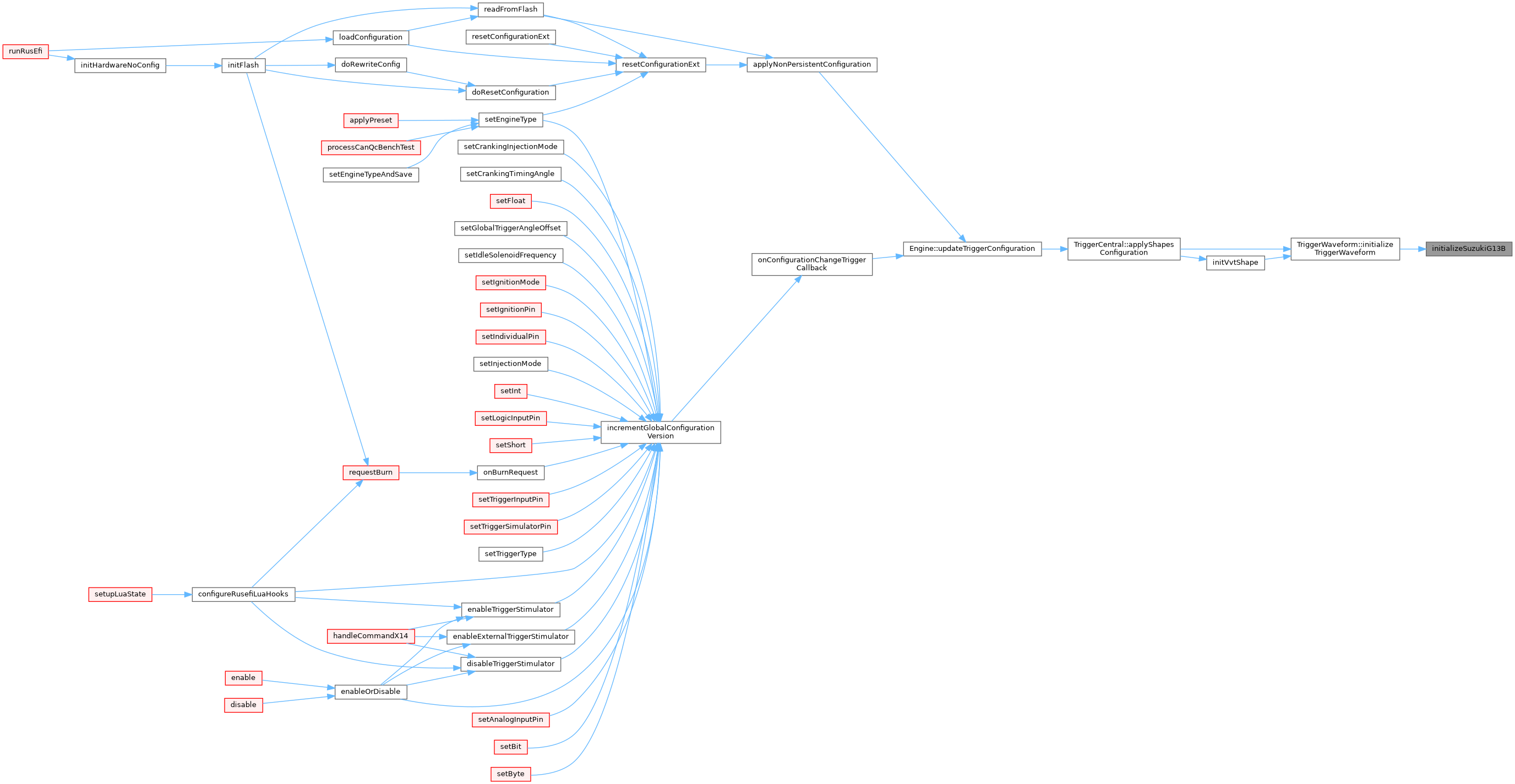
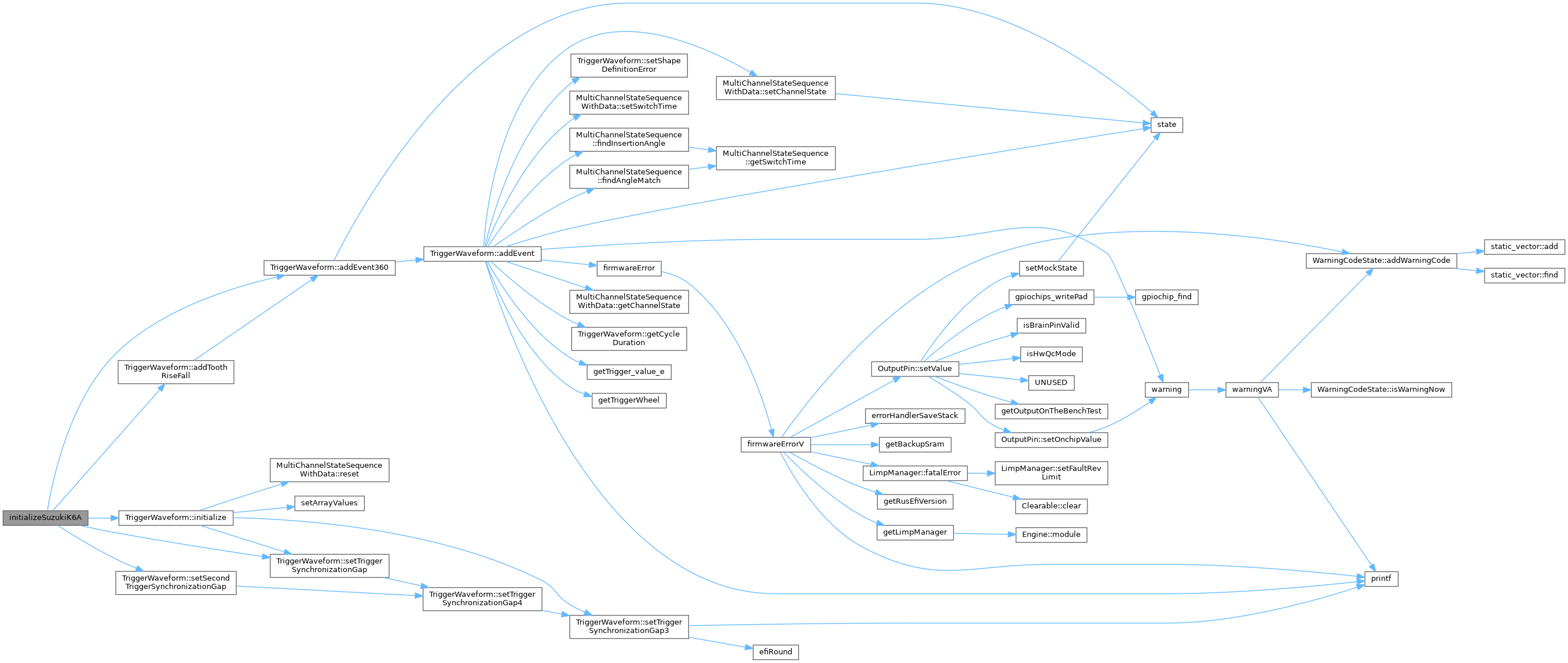
◆ initializeSuzukiK6A()
| void initializeSuzukiK6A | ( | TriggerWaveform * | s | ) |
Definition at line 37 of file trigger_suzuki.cpp.
37 {
39 float w = 5;
40
41 int secondTooth = 15;
42
43 // a bit lame: we start with falling front of first tooth
45
46 s->addToothRiseFall(secondTooth, w);
47 s->addToothRiseFall(43, w);
48
49 s->addToothRiseFall(120, w);
50 s->addToothRiseFall(120 + secondTooth, w);
51 s->addToothRiseFall(158, w);
52 s->addToothRiseFall(158 + secondTooth, w);
53
54 s->addToothRiseFall(240, w);
55 s->addToothRiseFall(240 + secondTooth, w);
56 s->addToothRiseFall(283, w);
57
58 // a bit lame: we end with rising front of first tooth
60
61 s->setTriggerSynchronizationGap(4.47);
62 s->setSecondTriggerSynchronizationGap(0.65);
63}
void addToothRiseFall(angle_t angle, angle_t width=10, TriggerWheel const channelIndex=TriggerWheel::T_PRIMARY)
Definition trigger_structure.cpp:256
void addEvent360(angle_t angle, TriggerValue const state, TriggerWheel const channelIndex=TriggerWheel::T_PRIMARY)
Definition trigger_structure.cpp:250
Referenced by TriggerWaveform::initializeTriggerWaveform().
Here is the call graph for this function:
Here is the caller graph for this function: