У меня есть три электронных дросселя для экспериментов на столе. Электронный дроссель - это не клапан управления холостым ходом, это именно основной дроссель.
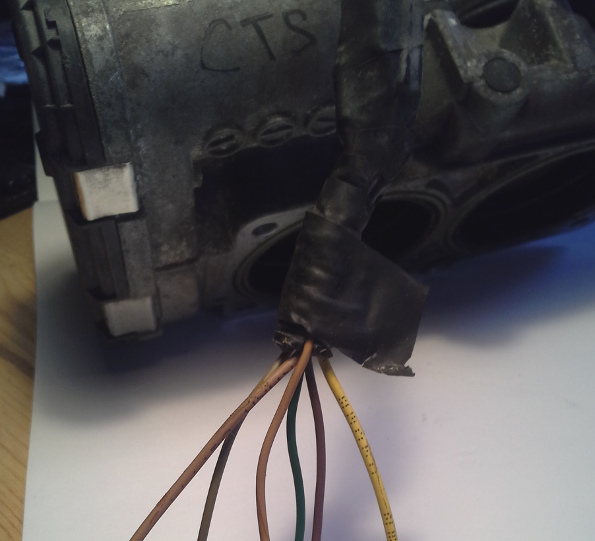
1) 2003 Сadillac Сts - ACDELCO 9128412, похоже использовался еще и на Opel Omega
2) 2006 Chevrolet Impala LS - ACDELCO 217-2296
3) 2005 Mitsubishi Galant (номер не нашёл - вроде такой же на 04-08 Endeavor)
Я вяло попробовал поуправлять ими просто с ШИМ и бросил. Нужна помощь - теория и практика (схема платы + информация по проводке) как же ими начать на столе управлять.
Я управлял дросселем от Nissan, по моему это был Hitachi. Там стоит коллекторный двигатель. По умолчанию дроссель немного приоткрыт. Возврат в исходное положение осуществляется пружиной (в обе стороны). Чтобы его полностью закрыть нужно менять полярность на моторе. Схема простая и представляет из себя h-bridge (проще всего взять готовую микросхему). Датчик положения сдвоенный с противоположным наклоном характеристик. Такой же сдвоенный датчик стоит на педали. То есть нужно 4 канала АЦП. Я пробовал управлять PID регулятором. Вся настройка свелась к подбору характеристик регулятора. В итоге получилось добиться очень быстрой реакции без заметных переходных процессов.
На фото дрочель от EW10A, пожожая система и на двиге EW10J4, ето от Пежо 407, такие же двигателя стоят и на Ситроен С5 и еще вроде на Пыже 307 но такие мне не попадались так что инфа может быть не точная .
система простая как двери, дисковый магнит стоит в зазоре електромагнита, управляется с помощю ШИМ как и остальные, все остальное аналогично остальным дроселям: два потенциометра, в отключке положение немного приоткрытое и т.д.
Больше фоток здесь:http://407club.ru/index.php?showtopic=1655
You do not have the required permissions to view the files attached to this post.
Last edited by BOOST on Fri Dec 06, 2013 1:03 pm, edited 1 time in total.
Теперь нужно понять, какие провода за что отвечают на моих дросселях - и как именно ими управлять. Сергей, ты можешь разжевать H-Bridge тому, кто понимает только ШИМ?
H-bridge нужен для того, чтобы менять полярность на моторе, чтобы крутить его в разные стороны. Управление положением осуществляется ШИМ сигналом. То есть ты подаёшь драйверу на вход ШИМ сигнал и два сигнала которые в комбинации задают направление вращения.
Sergey89 wrote:H-bridge нужен для того, чтобы менять полярность на моторе, чтобы крутить его в разные стороны. Управление положением осуществляется ШИМ сигналом. То есть ты подаёшь драйверу на вход ШИМ сигнал и два сигнала которые в комбинации задают направление вращения.
Пока не понял Можешь разжевать проще и подробнее, пожалуйста?
Вот я понимаю - в РХХ есть пружина и якорь, который соленоид тянет против пружины. Чем больше скважность - тем сильнее тянет, тем более открыт якорь.
В том дросселе что я разбирал стоит обычный моторчик и через редуктор он приводит в действие заслонку. Ось заслонки подсоединена через спиральную пружину к корпусу для возврата в исходное положение (реально там стоит 2 пружины, т.к. заслонка немного приоткрыта в исходном состоянии и каждая пружина тянет заслонку в своё сторону в зависимости от направления вращения). В каждом положении заслонка удерживается при каком-то значении duty шим сигнала. Твоя задача состоит в том, чтобы считывая сигнал положения установить такой duty, чтобы заслонка встала в нужное положение. При этом заслонку надо уметь вращать в обе стороны и для этого используется h-bridge, который позволяет менять полярность напряжения на моторчике.
Это всё касается конкретно той конструкции, которую я разбирал.
Ага. Чтобы открыть заслонку из исходного положения подаёшь и удерживаешь два логических сигнала на входе драйвера, которые говорят ему, в какую сторону крутить моторчик и один ШИМ сигнал для того, чтобы крутить мотор.
покажу свою реализацию электронного дроссЕля, делал её для машины без оного
L298N не подойдёт. слишком слаба.
я использовал http://www.pololu.com/product/755
вот видео испытания на столе
пиковый ток в момент резкого движения 10 ампер.
управление по ПИДу
в моём драйвере ШИМ на одном проводе, а направление - на другом. Соответственно знак - это направление, а значение по модулю - шим.
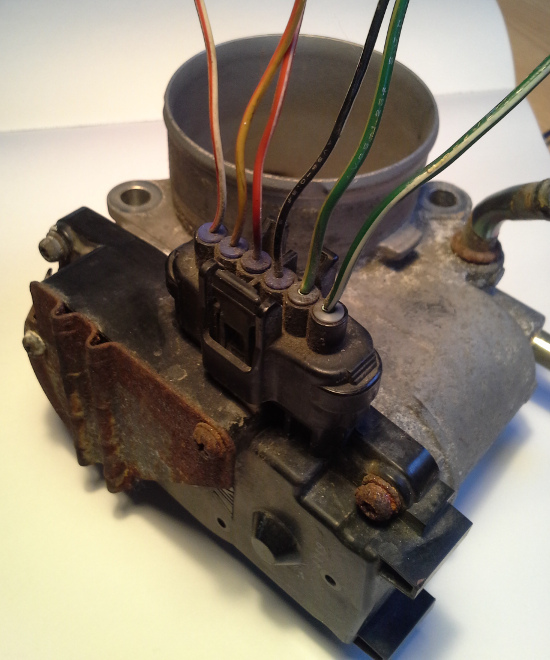
С самого электронного дросселя выходят 6 проводов:
два - обычный DC мотор
и четыре - датчик положения, состоящий из двух переменных резисторов, жёстко связанных с заслонкой.
сделал минут за 10 на ардуине
You do not have the required permissions to view the files attached to this post.
Теория хороша в том и только том случае, если она может достоверно предсказать результаты каждого нового опыта
сильно грузишь мотор.
ток там пиковый от 3 до 5 ампер. в зависимости от системы - это чисто физическое ограничение мостов в реальных ЭБУ. да и обмотка на 10 амперах долго не проживет. рабочий ток соответственно где то 0.5-0.7 пикового. его ограничивают через max DC на выходе PID. и корректируют по напряжению бортсети таким образом чтоб связь DC-ток оставалась постоянной.
Maxi wrote:
сильно грузишь мотор.
ток там пиковый от 3 до 5 ампер. в зависимости от системы - это чисто физическое ограничение мостов в реальных ЭБУ. да и обмотка на 10 амперах долго не проживет. рабочий ток соответственно где то 0.5-0.7 пикового. его ограничивают через max DC на выходе PID. и корректируют по напряжению бортсети таким образом чтоб связь DC-ток оставалась постоянной.
я говорю про мгновенный пиковый ток, видно на осциллографе.
средней пиковый ток как раз 3-5 ампера и есть.
Теория хороша в том и только том случае, если она может достоверно предсказать результаты каждого нового опыта
Расскажу про электродрочель Субару.
Коллекторный мотор управляется Шим, частота 500 Гц.
В нормальном положении он немного приоткрыт (примерно 11%, примерно 3 град.) по логеру.
Для сравнения на холостых 4-6%.
После включения зажигания каждый раз (если зажигание было выключено более чем на примерно 30 сек и реле электродросселя успело выключиться), происходит инициализация дросселя.
Сперва он полностью закрывается, потом полностью открывается и занимает положение запуска (порядка 7%).
Tps двухканальный, на эффекте Холла (линейный бесконтактный датчик).
Причем выходные характеристики каналов немного разные, либо вообще разные характеристики (канал А возрастающая, канал Б падающая)
Это позволяет процессору вычислить неисправность любого канала и работать по второму.
Педаль так же бесконтактная, двухканальная. Однако характеристики там одинаковые.
Дальше. По таблицам электродросселя, параметрам ограничения (например от системы курсовой стабилизации), на отдельный процессор дросселя поступает требуемое положение дросселя (67% например), Шим увличивает длительность импульса (видимо согласно своих внутренних карт), чтобы занять требуемое положение.
Однако там присутствует постоянная обратная связь по Tps и длительность импульсов шим корректируется в первую очередь по ней.
Т.е. просадка питания, затруднения в перемещении, грязь, усилие пружин на положение дросселя никак не влияют.
Я пробовал пальцем нажать на дроссель- болт. Он тока жужжит громче.
При отказе обоих каналов Tps, но исправной педали проц не знает где находится лопата, поэтому на дроссель
подается частота с короткими импульсами- так что при газ в пол дроссель более чем на 30-35% не откроется (по углу это около 10 град.)
Если отказала и педаль тоже, то дроссель отключается и остается приоткрыт сам по себе. Впринципе мотор молотит 2500-2700 об и можно доехать куда нибудь.
Друзья, давайте ближе к практике: у меня появился в коллекции третий дроссель - я добавил картинки в первый пост это ветки. Если кто-то может собрать информацию, что там в каком проводе - это будет уже огромная помощь.
С Митсу дросселем очень просто- я даже без электросхем уверен что зеленые провода это мотор.
Разъем такой же как на Субарях 05-07.
Прозвони омметром.
Черный это минус питания ТПС.
Рядом красный это +5в питание тпс.
Ну а 2 верхних- выход тпс канал а и канал б.
Кстати наверняка эти контакты разъема золоченые.
прозвони мотор, если я прав- кинь +5 на красный, минус на черный, вольтметр на черный- коричневый и понажимай на лопату. напряжение будет меняться.
Mad Max wrote:Черный это минус питания ТПС.
Рядом красный это +5в питание тпс.
Ну а 2 верхних- выход тпс канал а и канал б.
Кстати наверняка эти контакты разъема золоченые.
прозвони мотор, если я прав- кинь +5 на красный, минус на черный, вольтметр на черный- коричневый и понажимай на лопату. напряжение будет меняться.
Коллега, может мы на разные картинки смотрим? Ты про жёлтый?
Что-то не получилось. Кинуль землю на чёрный и +5в на красный. На жёлтом получил +3 и на белом +0.9 - на движение лопаты реакции нет.
Mad Max wrote:Прозвони омметром.
Я программист. Ты сейчас вот с кем разговариваешь? Мне нужны инструкции полезнее.
Update: между зелёными вроде бы 1 Ом, что-то такое.
"- Доктор, откуда у вас такие картинки?"
Спасибо огромное!
Датчик Холла на Галанте значит - это объясняет мой вчерашний провал Интересно, значит у меня есть два разных по конструкции дросселя - это уже хорошо! Кадилак пойдёт в кладовку подальше, остальные ждут H-bridge платку.