Enumerations | |
| enum | AccelType_t { ACCEL_UNK = 0 , ACCEL_LIS2DW12 , ACCEL_LIS2DH12 , ACCEL_LIS302DL , ACCEL_LIS3DSH } |
Functions | |
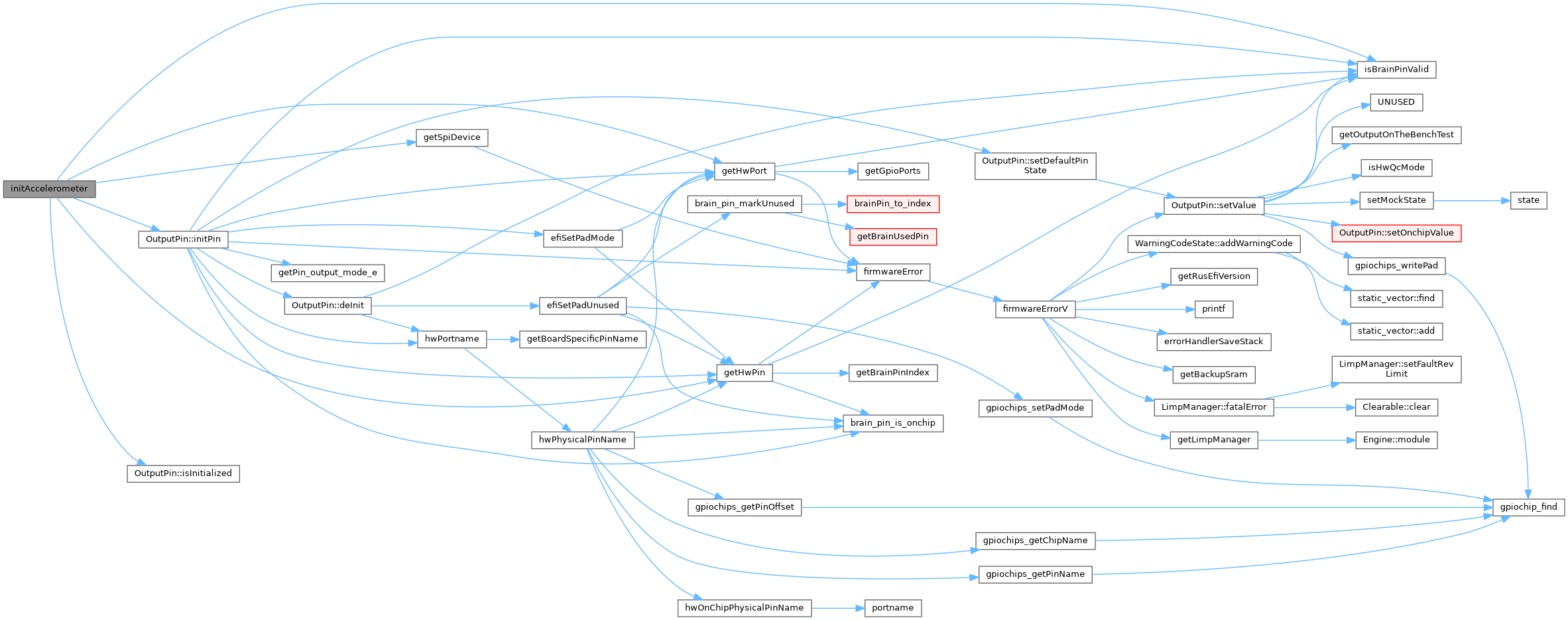
| void | initAccelerometer () |
Variables | |
| static SPIConfig | accelerometerSpiCfg |
| OutputPin | accelerometerChipSelect |
| static LIS2DW12Config | lis2dw12cfg |
| static LIS2DW12Driver | LIS2DW12 |
| static LSM303AGRConfig | lis2dh12cfg |
| static LSM303AGRDriver | LIS2DH12 |
| static LIS302DLConfig | lis302dlcfg |
| static LIS302DLDriver | LIS302DL |
| static LIS3DSHConfig | lis3dshcfg |
| static LIS3DSHDriver | LIS3DSH |
| static AccelType_t | AccelType = ACCEL_UNK |
| static AccelController | instance |
Enumeration Type Documentation
◆ AccelType_t
| enum AccelType_t |
| Enumerator | |
|---|---|
| ACCEL_UNK | |
| ACCEL_LIS2DW12 | |
| ACCEL_LIS2DH12 | |
| ACCEL_LIS302DL | |
| ACCEL_LIS3DSH | |
Definition at line 170 of file accelerometer.cpp.
Function Documentation
◆ initAccelerometer()
| void initAccelerometer | ( | ) |
Definition at line 222 of file accelerometer.cpp.
Referenced by initHardware().

Variable Documentation
◆ accelerometerChipSelect
| OutputPin accelerometerChipSelect |
We need to make sure that accelerometer device which physically exists does not conflict with SD card in case of shared SPI. We reply on specific order of execution here: 1) accelerometer pre-initialization into safe CS pin state 2) SD card initialization 3) accelerometer main initialization if accelerometer feature is desired
Definition at line 70 of file accelerometer.cpp.
Referenced by hellenMegaAccelerometerPreInitCS2Pin(), and initAccelerometer().
◆ accelerometerSpiCfg
|
static |
Definition at line 46 of file accelerometer.cpp.
Referenced by initAccelerometer().
◆ AccelType
|
static |
Definition at line 178 of file accelerometer.cpp.
Referenced by initAccelerometer().
◆ instance
|
static |
Definition at line 220 of file accelerometer.cpp.
Referenced by initAccelerometer().
◆ LIS2DH12
|
static |
Definition at line 123 of file accelerometer.cpp.
Referenced by initAccelerometer().
◆ lis2dh12cfg
|
static |
Definition at line 98 of file accelerometer.cpp.
Referenced by initAccelerometer().
◆ LIS2DW12
|
static |
Definition at line 92 of file accelerometer.cpp.
Referenced by initAccelerometer().
◆ lis2dw12cfg
|
static |
Definition at line 74 of file accelerometer.cpp.
Referenced by initAccelerometer().
◆ LIS302DL
|
static |
Definition at line 145 of file accelerometer.cpp.
Referenced by initAccelerometer().
◆ lis302dlcfg
|
static |
Definition at line 128 of file accelerometer.cpp.
Referenced by initAccelerometer().
◆ LIS3DSH
|
static |
Definition at line 166 of file accelerometer.cpp.
Referenced by initAccelerometer().
◆ lis3dshcfg
|
static |
Definition at line 151 of file accelerometer.cpp.
Referenced by initAccelerometer().